Изобретение относится к массоиэмерительной технике.
По основному авт. св. 685922 известно устройство для измерения ассы, используемое преимущественно в -весах. Это устройство содержит грузоподъемную платформу, установленную на массоизмерительный преобразователь, на упругом элементе которого размещены два первичных преобразователя, подключенные к блоку измерения, и блок коррекции с эталонным грузом. Первичные пребразователи размещены на расстоянии друг от друга, при котором отношение величин их сигналов равно заданному
Известное устройство не обеспечивает требуемой точности измерения при нелинейной характеристике массоизмерительного преобразователя.
Цель изобретения - повышение точности измерения при нелинейной характеристике массоизмерительного преобразователя.
Поставленная цель достигается тем, что устройство для измерения массы снабжено блоком управления электромагнитами и дополнительньвд блоком коррекции, выполненным в виде эталонного груза и электромагнита, причем электромагнит дополнительного блока коррекции разменян на упругом элементе массоизмеритеяьного преобразователя между дервичными преобразователями.
На чертеже изображена блок-схема устройства для измерения массы.
Измеряемая масса 1 помещена на грузоподъемной платформе 2, Платформа 2 установлена на массоизмеритель, на упругом элементе 3 котороro размещены первичные преобразователи 4 и 5, например тензорезист рные. йа упругом элементе 3 между первичными преобразователяю 4 и 5 размещен электромагнит 6, взаимо-действукяшй с эталонньм грузом 7. Электромагнит 6 и эталонный груз 7 составляют дополнительный блок коррекции. Выходы первичных преобразователей 4 и 5 подключены к входам блока 8 измерения. К грузоподъемной платформе 2 с помощью электромагиита 9 присоединяется эталонный груз 10. Электромагнит 9 и эталонный груз 10 составляют основной блок коррекции . Управление работой электромагнитов производится блоком 11 упраВ ления..
о „-.-
Принцип действия устройства закючается в проведении ряда измерений сигналов с первичных преобраэо-. вателей 4 и 5 при воздействии на весоизмерительный преобразователь . измеряемой массы 1 и масс этгшонных . грузов 7 и 10. Величины масс этёшон-i
ных грузов 7 и 10 определяются техническими требованиями к устройству и рассчитываются из условия инимума результирующей погрешности измерения.
Функция преобразования массоизмерительного устройства аппроксимируется выражением вида
Р,
+ aj.
У
Чс где у
-выходной сигнал преобразователя
-параметры функции преобраазования устройства;
1 -4 Т - участок аппроксимасции;
Р - измеряемая масса. Параметры а . зависят от измеряемой массы, от изменения внешних условий, от временного дрейфа характе ристик элементов устройства. Измеобусловливает
нение величины а
tC
,погр«аность измерения. Влияние а устранено за счет проведения ряда измерений.
Устройство работает следующим образом.
Упругий элемент 3 массойзмер тельного преобразователя воспринимает усилие, пропорциональное измеряемой массе Р груза 1. Блок 8 измерения получает с Ьыхода первнчнозго преобразователя 4 сигнал Уд, с выхода первичного преобразователя 5 сигнгш у. После включения электромагнита 6 с первичного преобразователя 5 снимается сигнал y,j . Во втором такте измерения, после включения электромагнита 9, электромагнит 6 остается включенным. Блок 8 измерения с выхода первичного Преобразователя 4 получает сигнал у . Изг«ряемая масса и получаекые сигналы с первичных преобразователей связаны соотношениями :
а
+ а.Р +
+ , + а,кР а
+ + в) + а СРк-Ю).
У, а УЗ а + а2(Р + в) + в)Эта система .решается в блоке 8 измерения по выражению
o.iV-lWVM 9
р
(.V)-(-M Включением электромагнитов корректирующих блоков управляет блок 11 управления.
Устройство измерения масс реализует аддитивные, иогльтипликатившяе и комбинированные тесты.
Таким образом, результат измерения не зависит от параметров а нелинейной функции преобразования массойзмбрительного преобразоватеJ 10 7ПГ. Проведя во втором такте еще одно иэ{4ерение , , . ч У 1 wj + а.{к(Р + 9)4 вЯ и решив систему управления у,- у , исключают влияние . иа результат измерения массы Р. Следовательно, исключается влияние на точность измерения массы внешних условий и дрейфа отдельных элементов устройства, .нелинейноетн характеристик упругого элемента 6764. 4 и первичных преобраэоватейей в пределах точности ашфоксимгиции Точность нзмереюая массы определяется стабильйостьп масо эталон №ix грузов, ндентичностыо первнчяых 5 преосчраэователёй м точностыо аппрок, с1шации функция преовраэоваиня массоизмерительиого устройства, : ;, Использование яэсвретения поэвоя .Q лит првысить точность измерения массы при нелинейной хздрактеристике массойэмерятельного П1 еовраэова теля. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Массоизмерительное устройство | 1983 |
|
SU1164554A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| ТЕНЗОМЕТРИЧЕСКОЕ МАССОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ (ВАРИАНТЫ) | 2009 |
|
RU2411463C2 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1269038A1 |
| Крановое массоизмерительное устройство | 1983 |
|
SU1143987A1 |
| Устройство для измерения массы | 1975 |
|
SU523299A1 |
| Способ измерения электрических и неэлектрических параметров | 1978 |
|
SU785769A1 |
| Устройство для измерения массы | 1975 |
|
SU523300A1 |
| Способ измерения массы | 1986 |
|
SU1366882A1 |
| Устройство балансировки нуля массоизмерительной системы | 1979 |
|
SU872969A1 |
УСТРОЙСТЮ ДЛЯ ИЗМЕРЕНИЯ {МАССЫ по авт. св. 685922, о т л ич а ю щ,е ее я тем, что, с целью повышения точности измерения при. нелинейиЫ характеристике массоизмерительного преобразователя, оно снабжено блоком управления электрсмкаг HHToU4H и дополнительным блоком корг рекции, выполнен1шм в виде вого груза и электромагнита, причем электромагиит дополнительного блока KoppeKiufH размещен на упругом элементе масооизмерительного преобразователя между первичными преобразователями .: 9 Vj 9 .U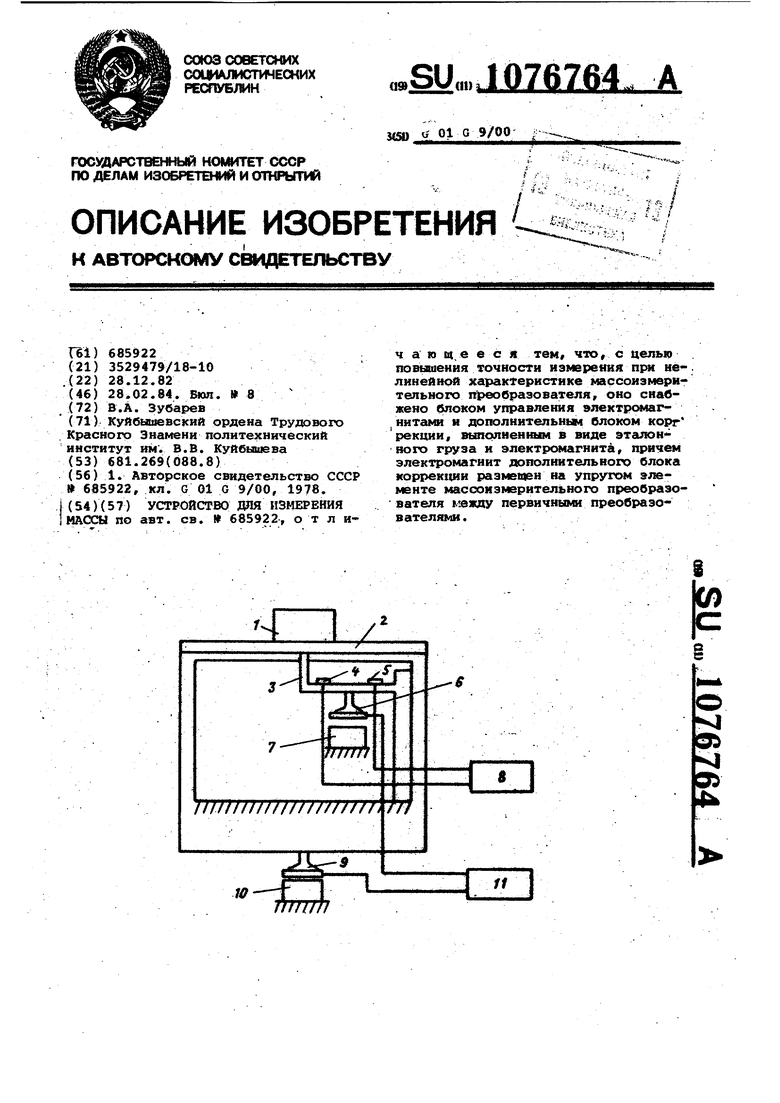
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| I | |||
