Изобретение относится к автоматике и вычислительной технике, в частности к устройствам распознавания изображений, и может быть использовано для распознавания промышленных изделий роботами при автоматизации технологических операций .
Известно устройство для распознавания изображений, используемое в промышленных роботах, содержащее блок визуального управления, блок управления, телекамеру и сервопривод. Это устройство обеспечивает распознавание объектов, движущихся с постоянной скоростью на подвижном конвейере ij .
Недостатком известного устройства является его сложность и высокая стоимость вследствие необходимости применения сложных электронных блоков интерфейса и мощной 3BN5 с высоким быстродействием и большим объемом оперативкой памяти.
Наиболее близким к пpeдлaгaeмo г/ по технической сущности является устройство для распознавания изображений, содержащее блоки формирования признаков, каждый из которых состоит из, последовательно соединенных компаратора, элемента И н счетчика, выходы которых подключены к одним из входов блока классификации, блок памяти и генератор импульсов,
Устройство содержит также блок управления манипулятором (ЭВМ) телекамеру и осуществляет опознавание объектов, движущихся на конвейерной ленте. Телекамера соединена через схему отбора и схему квантования с первыми входами элементов И, вторые входы которых соединены с выходами соответствукндих генераторов стробирующих сигналов и через соответствующие элементы ИЛИ. счетчики-и компараторы с блоKOf.-, управления Гз .
О дпако сложность и стоимость это го v.c.ipoilCTBa остаются выcoки И и не позволяют широко применять в промл шенно автоматике. Кроме того, это устройство не обеспечивает расггознаванне Gf/ъектов, произвольно :эриентировакг;ы:;;. в поле зрения (отсутствует инхчариантность кповороту объектов),
Цель изобретения - упрощение устройства .
Ьказаннал цель достигается тем, fTo устройство для распознавания изображений, содер-каюеа блоки формирования признаковг каждый из. которых состоит из пос:ле,г;овательно соединенных компаратоГН,. элемента И и счетчика, БЕ-УОДЫ которых подключены к одним и :-1 входов бггока класскфикации, блок памяти и генератор импульсов, содержит оптически связанные узел вращения изображения и позицио но-чувствительный фотоприемник, бло задания порогов, распределитель импульсов, первый и второй формирователи импульсов и нуль-орган, входы которого подключены к выходам позицион но- чувствительно го фотоприемника, выход которого подключен к входам компараторов блоков формирования признаков, входы первого формирователя импульсов соединены с выходом нуль-органа и узла вращения изображения, выход блока классификации подключен к входу второго формирователя импульсов, выход которого соединен с входом блока памяти, выход которого подключен к входу распределителя импульсов, выход которого соединен с другим входом блока классификации.
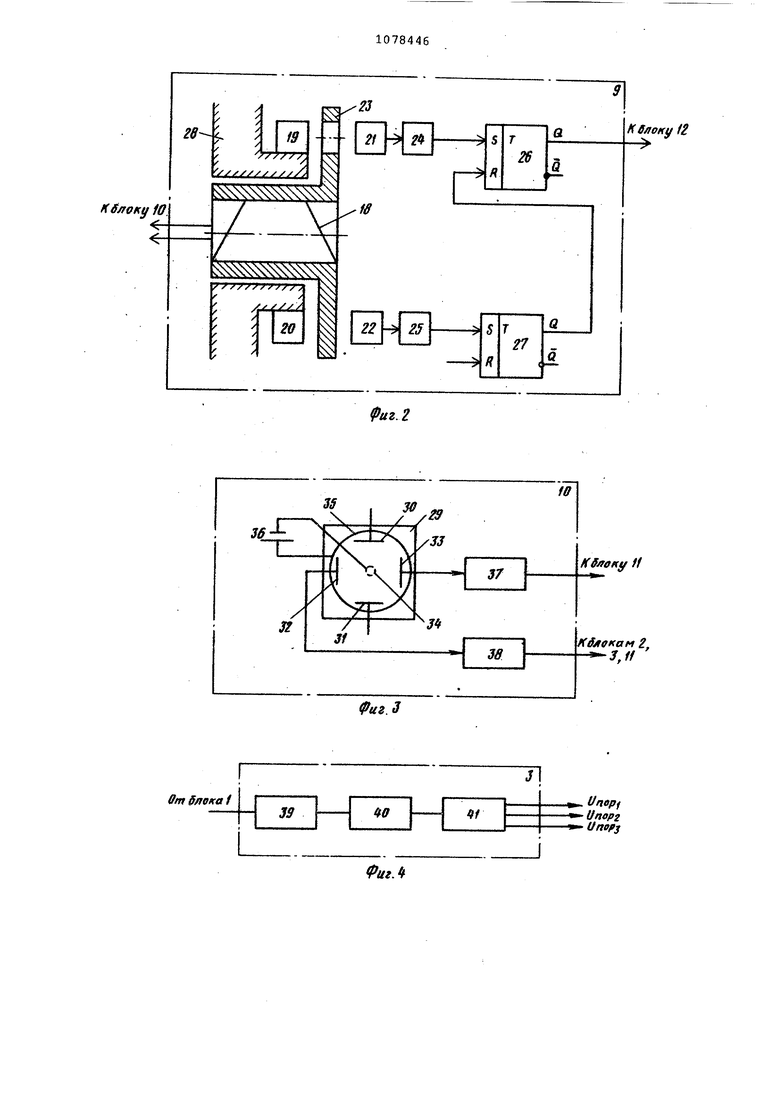
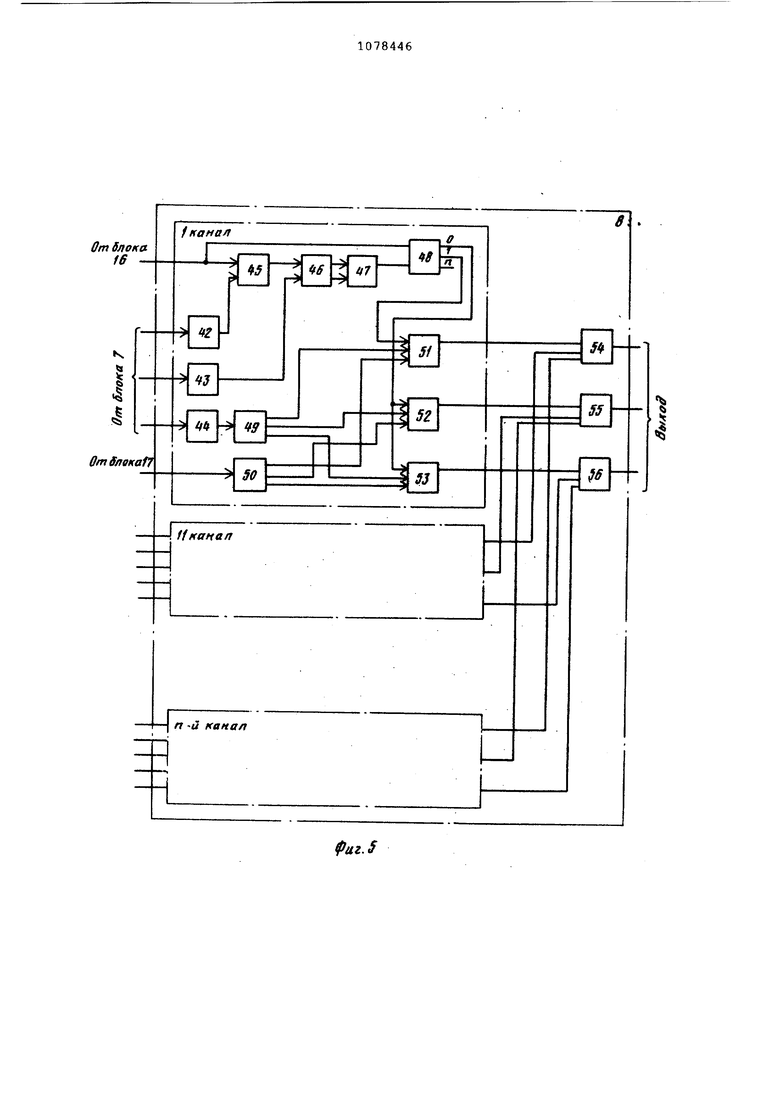
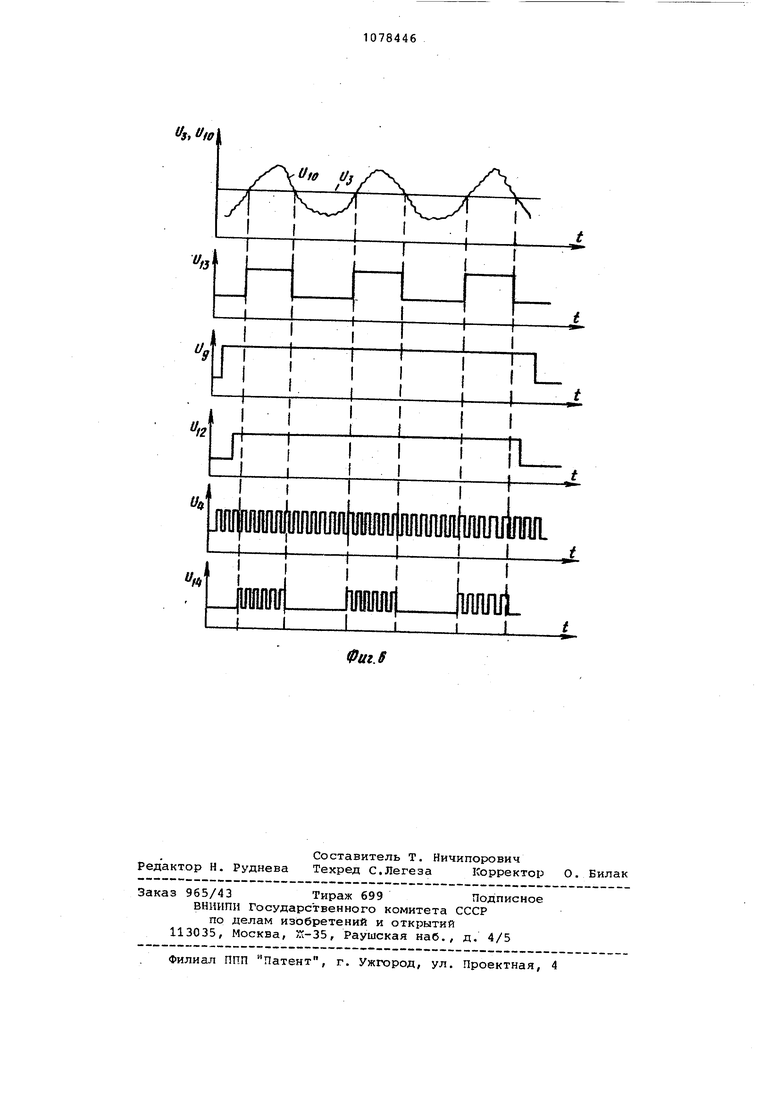
На фиг. 1 приведена блок-схема устройства для распознавания изображени , на фиг. 2 - структурная схема узла вращения изображения/ на фиг. 3 - функциональная схема одного из возможных вариантов позицион но- чу ветви тельного фотоприем ника, на фиг. 4 - вариант реализации блока задания порогов; на фиг. вариант реализации блока классификации, на фиг, 6 - временная циаграмма вьшеления импульсов в одном из идентичных кангшов блока формирования импульсов.
Устройство для распознавания изображения содержит (фиг. 1) блок 1 преобразования изображения, блоки 2 формирования признаков, блок 3 задания порогов, генератор 4 импульсов, формирователь 5 импульсов, блок 6 памяти, распределитель 7 импульсов, блок 8 классификации.
Блок 1 преобразования изображения содержит узел 9 вращения изображения, позиционно-чувствительный фотоприемник 10, нуль-орган 11 и формирователь 12 импульсов, а каждый из блоков 2 фор -1ирования признаков содержит компаратор 13, элементы И 14 и 15 и счетчики 16 и 17.
Узел 9 вращения изображения (фиг. 2) содержит призму 18 Дове, источники 19 и 20 и приемники 21 и 22 излучения, диск 23 с прорезью усилители 24 и 25, триггеры 26 и 27 корпус 28.
Позиционно-чувствительный фотоприемник (фиг, 3) содержит полупроводниковую пластину 29, токосъемные электроды 30-33, центральный электрод 34, кольцевой электрод 35, источник 36 напряжениярадиального электрического поля и усилители 37 и 38.
Блок 3 задания f oporoB (фиг. 4) содержит амплитудный детектор 39, эмиттерный повторитель 40, делител 41 напряжения.
Блок 8 классификации содержит (фиг, 5) регистры 42-44, узлы 45 вычитания, схемы 46 сравнения, элементы ИЛИ 47, дешифраторы 48-50, элементы И 51-56.
Устройство распознавания изображения работает следующим образом.
Изображение распознаваемого объекта, движущегося на конвейерной линии, проецируется на чувствительную поверхность позиционночувствительного фотоприемника 10, токосъемные электроды 31 и 32 которого через нуль-орган 11 определяют совпадение энергетического центра изображения с геометрическим центром позиционно-чувствительного.фотоприемника 10, В это же время в узле 9 вращения изображения вырабатывается сигнал, определяющий период вращения изображения, который с сигналом с нульоргана 11 в формирователе 12 обеспечивает формирование стробирующего сигнала, подаваемого на элементы И 14 в блоках 2 формирования признаков.
Аналоговый сигнал с позиционночувствительного фотоприемника 10 через усилитель 38 поступает на компараторы 13, где происходит их сравнение с пороговыми напряжениями, выработанными в блоке 3 задания порогов, и их преобразование в дискретный сигнал. Дальнейшая обработка сигнала производится по двум каналам каждого блока 2 формирования признаков,
В первом канале определяется суг/марная длительность импульсов за период вращения изображения с компараторов 13, дл. этой цели на счетные входы счетчи.чов 16 поступают сигналы с генератора 4 импульсов, стробируемые сигналы с компараторов 13 и формирователя 12. Стробирование происходит в элементах .).И 14. Счетчики 16 считывают импульсы за время, которое соответствует одному полному обороту изображения. На выходах счетчиков 16 для каждого блока 2 формирования признаков получаются числа, пропорциональные количеству импульсов генератора 4 импульсов, которые составляют код данного распознаваемого объекта.
Во втором канале блоков 2 считывается число импульсов с компараторов 13 за период вращения изображения. Для этой цели на счетные входы счетч1.гков 17 поступает сигна через элементы И 15 с компараторов 13. Счетчики 17 считывают эти импульсы, которые как и импульсы, сосчитанные счетчиками 16 являются значениями, кодов признаков распознаваемых объектов. Сигналы кодов 5 со счетчиков 16 и 17 поступают на соответствующие входы блока 8 классификации, где происходит их сравнение с эталонными кодами и формирование сигнала, определяющего
0 распознаваемый объект, т,е, принятие решения об объекте. При отсутствии сигнала распознавания на выходе блока 8 классификации формирователем 5, выполненнЕлм в виде много5 входового элемента ИЛИ, формируется управляющий сигнал смены эталона.
Рассмотрим работу отдельных блоков предлагаемого устройства. Блок 1 преобразования изображения служит
0 для преобразования оптического изображения распознаваемого объекта в электрический.сигнал и содержит узел вращения изображения, позиционночувствительный фотоприемник 10,
5 нуль-орган 11 и формирователь 12. В блоке преобразования изображения осуществляется радиально-круговая развертка изображения (когда оценивается суммарное значение освещенд ности всех точе1 вдоль радиуса, вращаемого при развертке). Для этой цели в узле 9 вращения изображения (фиг. 2) происходит вращение изображения распознаваемого объекта при помощи, например, призмы 18 Дове, Симметрично относительно оси вращения расположены две пары оптически связанных источника 19 (20) излучения и приемника 21 (22) излучения, между которыми вращается
0 диск 23 с прорезью, жестко механически связанный с призмой Дове, Призма 18 Дове с диском 23 вращаются с постоянной скоростью, при этом через щель поочередно освещаются
5 приемники 21 и 22 излучения (например, фотодиоды), Сигналы, получаемые от приемников 21, 22 излучения представляют собой метки начала и конца периода вращения изображе0 ния. Одному обороту изображения соответствует время между срабатыванием одного 21 и второго 22 приемНика излучения. Сигналы от приемников 21 и 22 излучения усиливают5 ся в усилителях 24 и 25 и поступают .на триггеры 26 и 27, где формируется сигнал периода вращения изображения, который поступает на формирователь 12, Через узел 9 вращения
0 изображения изображение объекта проецируется на чувствительную поверхность позиционно-чувствительного фотоприемника 10. В качестве фотоприемника могут быть применены по5 зиционно-чувствительные фотоприемНики: квандрантный фотодиод, поэиционно-чувствительныи фотоприемник с продольным эффектом и позиционночувствительный фотоприемник с радиальным электрическим полем. Наиболее-эффективно применение фотоприемника с радиальным электрическим полем, который представляет собой (фиг. 3) монокристаллическую полупроводниковую пластину 29, содержащую четыре ортогонально расположенных токосъемных электрода 30-33 центральный 34 и кольцевой 35 электроды. Позиционно-чувствительный фотоприемник 10 такого типа позволяет определить как координат энергетического центра оптического изображения объекта, так и преобразовать оптическое изображение в информ.ационный электрический сигнал, из которого определяют значения признаков изображения.
Нуль-органы 11 используются для определения момента совпадения энергетического центра оптического изображения с .геометрическим центром .позиционно-чувствительного фотоприемника 10 и отработки стробирующего сигнала, подаваемого на фомирователь 12 импульсов, где совместно с сигналом от узла 9 вращен изображения вырабатывается сигнал, поступающий на элементы И 14 каждого блока 2 формирования признаков.
Распознаваемые объекты движут.ся на конвейерной линии и зафиксированы по одной координате (например, по вертикальному направлению У). Поэтому задача совпадения центров сводится к совпадению координаты центров по горизонтальног/iy направлению (координата X).
Блоки 2 формирования признаков служат для обработки электрического сигнала, поступающего с блока 1 преобразования изображения.
Принцип выделения иглпульсов для формирования признаков на примере одкохо канала поясняется временной .r.UiajpaMMOfi (фиг. 6). Количество блков 2 определяется классом распознаБае;-ль х объектов и требованиями к (ТОЧНОСТИ распознавания. Блоки форГ 1ирС1Вания признаков отличаются только уровнем порогового напряжения, подаваемого на компараторы 13 с блока 3 зггдания порогов.
Блок 3 задания порогов (фиг. 4) служит для автоматического форГ Мрования noporoiBoro напряжения, подаваемого на установочные входы компараторов 13 блоков 2 фop Iиpoвания признаков. Амплитудный детектор 39 определяет величину максимального сигнала с позиционночувствительного 4отоприемника 10 и . через э 1иттepный повторитель 40 подает этот сигнал на делитель 41 напряжения, где и формируются пороговые напряжения для компараторов 13 каждого блока 2 форь1ированияпризнаков.
Генератор 4 импульсов служит для вЕлработки прямоугольных импульсов с частотой, намного превышающей частоту обрабатываемого электрического сигнала с компараторов 13.
Предлагаемое устройство обеспечивает формирование признаков изобржений, инвариантных и к освещенности, и к ориентации о.брабатываемых изображений (число импульсов с компараторов за период вращения и их суммарная длительна5сть не зависят от ориентации изображения). Это позволяет описывать изображение набором инвариантных признаков.
Кроме того обеспечивается инвариантность к скорости вращения, так как каждый из блоков 2 обеспечивает получение признака, пропорционального длительности периода вращения. В блоке 8 классификации информация со счетчика 16 и регистра 42 о текущем и эталонном признаках в виде числа импульсов поступает на узел 45 вычитания, где эти два числа (признака) вычитаются и результат в схеме 46 сравнения сравнивается с допускаемым значением близости признаков, который определяется экспериментально в процессе обучения устройства и поступает на регистр 43 с блока б памяти. В схеме 46 сравнения происходит анализ близости признаков и в случае выполнения условий близости через элемент ЛЛИ 47 дается разрешение на дешифрацию Р нформации в дешифраторе 48 со счетчиков 16 блоков 2 формирования признаков. С помощью элементов 54-56 формируются сигналы о распознаваемом объекте в совокупности по всем каналам.
Таким образом, благодаря использованию полупроводникового позиционно-чувствительного фотоприемника в блоке преобразования изображений вместо телекамеры, а также включению высокопроизводительной ЭВМ и использованию вместо нее блока классификации из небольшого количества логических элементов С)беспечивается упрощение известного устройства. ПредЛгггаемое устройство более экономично, позволяет осуществить распознавание, инвариантное к повороту, умев-1ьшить габариты и энергоемкость.
фиг. 1
19
V
Л
K ffOKy 10
$$$$$$$$$ S
/y
20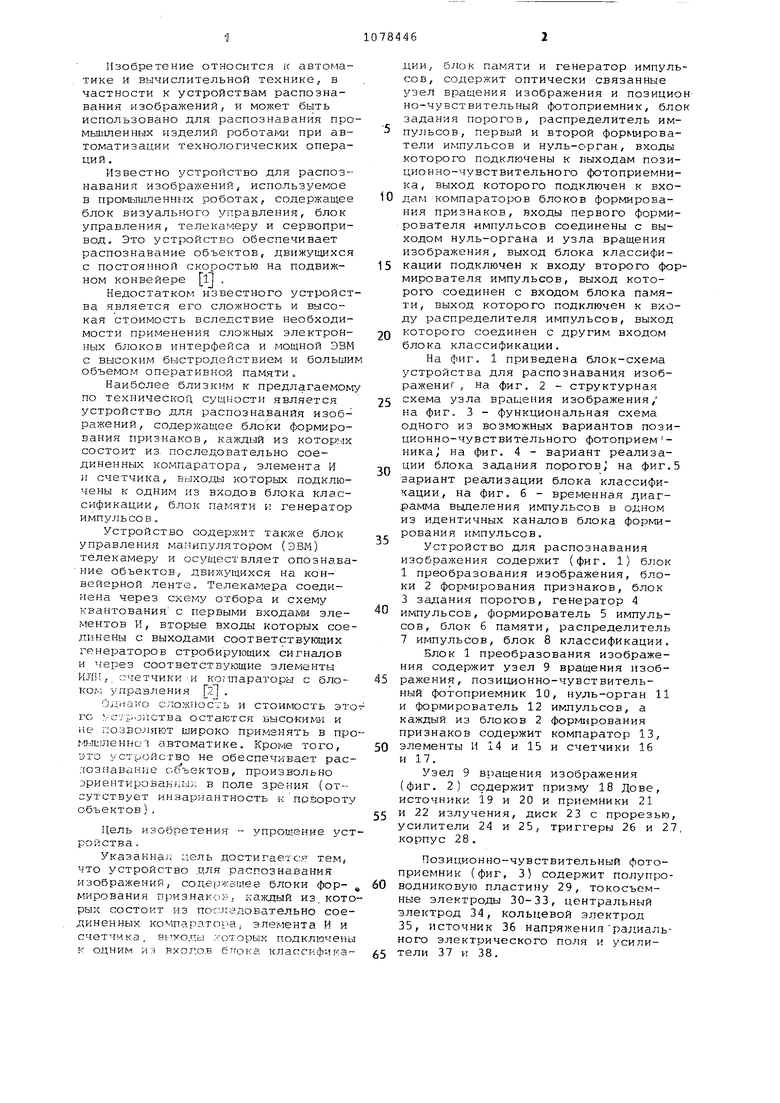
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания изображений | 1985 |
|
SU1339601A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ СЛОЖНОЙ ОСВЕЩЕННОСТИ И/ИЛИ СЛОЖНОЙ ЯРКОСТИ ОБЪЕКТОВ | 2009 |
|
RU2416171C1 |
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ СЛОЖНОЙ ОСВЕЩЕННОСТИ И/ИЛИ СЛОЖНОЙ ЯРКОСТИ ОБЪЕКТОВ | 2007 |
|
RU2362275C1 |
| Способ измерения угловых перемещений объекта в двух взаимно перпендикулярных плоскостях и устройство для его осуществления | 1981 |
|
SU1049735A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ СЛОЖНОГО ОСВЕЩЕНИЯ И/ИЛИ СЛОЖНОЙ ЯРКОСТИ ОБЪЕКТОВ | 2011 |
|
RU2472299C1 |
УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ, содержащее блоки формирования признаков, каждый из которых состоит из последовательно соединенных компаратора, элемента М и счетчика, выходы которых подключены к одним из входов блока классификации, блок памяти и генератор импульсов, отличающееся тем, что, с целью упрощения устройства, оно содержит оптически связанные узел вращения изображения и позиционно-чувствительный фотоприемник, блок задания порогов, распределитель импульсов, первый и второй формирователи импульсов и нуль-орган, входы которого подключены к выходам позиционно-чувствительного фотоприемника, выход которого подключен к входам компараторов блоков формирования признаков, входы первого формирователя импульсов соединены с выходом нуль-органа и узла вращения изображения, выход блока классификации подключен к входу второго сл формирователя импульсов, выход которого соединен с входом блока памяти, выход которого подключен к входу распределителя импульсов, выход которого соединен с другим входом блока классификации. эо 4 4 эь
К блоку ff
J(блокам 2. 3,ff
Puz.3
/канал
От блока 16 V
I
ОтблокоП
St
I
55
ff/fatta/r
п й канал
fl
faz.S
ff3.tl,o
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов, М., Машиностроение, 1977, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент CDIA W 3959771, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
