Изобретение относится к устройствам для автоматизации и механизации погрузо- разгрузочных работ и предназначено для порядной разборки пакетов штучных грузов, например, коробок или мешков с сыпучим материалом.
Известно устройство для разбора паке-, .та штучных изделий, содержащее шахту для размещения пакета и размещенное в последней приспособление для выдачи изделий из пакета с эластичными элементами, установленными с возможностью взаимодействия с боковыми торцами изделий в пакете. Приспособление для выдачи изделий содержит створки, шарнирно подвешенные на противоположных стенках шахты и связанные с приводом их сведения и разведения для взаимодействия с боковыми
поверхностями пакета. Эластичные элементы представляют собой ветви ленты, каждая из которых размещена внутри шахты вдоль соответствующей створки с возможностью вертикальнбго перемещения вдоль нее и соединена одним концом с приводом рабочего хода ленты, а другим, размещённым в зоне верхнегб слоя пакета, - с механизмом возврата ее в исходное положение.
Недостатками являются энергоемкость устройства и возможность повреждения тары в связи с сжима ющим действием створок.
Наиболее близким по технической сущности и достигаемому эффекту является машина для разборки пакетов штучных грузов, содержащая раму, на которой смонтирована кассета, имеющая упорную стенку, в верч О СО
00 О
хней части которой закреплены направляющие ролики, подъемно-опускной стол, выдающий конвейер, ориентирующую разделительную площадку, сталкивающий механизм. Машина снабжена гибкой лентой. проходящей вдоль одной поверхности упорной стенки и прикрепленной одним концом к подъемно-опускному столу, а другим - к разделительной площадке причем на ленте установлено нажимное устройство.
Недостатками данной машины являются сложность ко йсЧ-рукци большая металлоемкость, заключающаяся в наличии громоздкого сталкивающего механизма, смонтированного в виде цепного конвейера с двумя скребками, которые перемещаются сначала наклонно, параллельно слою пакета, а затем горизонтально.
Целью изобретения являются уменьшение габаритов, упрощение конструкции и снижение металлоемкости.
Поставленная цель достигается тем, что в пакеторазборной машине для штучных грузов, преимущественно мешков, содержащей L-образную, установленную с возможностью ограниченного поворота вокруг горизонтальной оси раму с платформой, размещенную вдоль вертикально ориентированных стоек, рамы гибкую ленту, огибающую верхний и нижний направляющие элементы, наклонную перегрузочную площадку и сопряженный с нижним концом последней выдающей конвейер, верхний направляющий элемент представляет собой барабан, смонтированный на горизонтальном подвижном бт привода вдоль стоек рамы, валу, гибкая лента верхним концом закреплена на барабане, нижним-на платформе, а выдающий конвейер смонтирован под платформой, при этом наклонная и перегрузочная площадка размещена с зазором от упомянутых стоек рамы для прохода груза и имеет угол наклона от вертикали, соответствующий углу поворота L-образной рамы. В стойках рамы смонтированы связанные с приводом вращения винты, несущие маточные гайки, с которыми связан концами упомянутый горизонтальный вал, а по крайней мере вдоль бдной из стоек закреплена зубчатая рейка, взаимодействующая с закрепленными на валу зубчатым колесом.
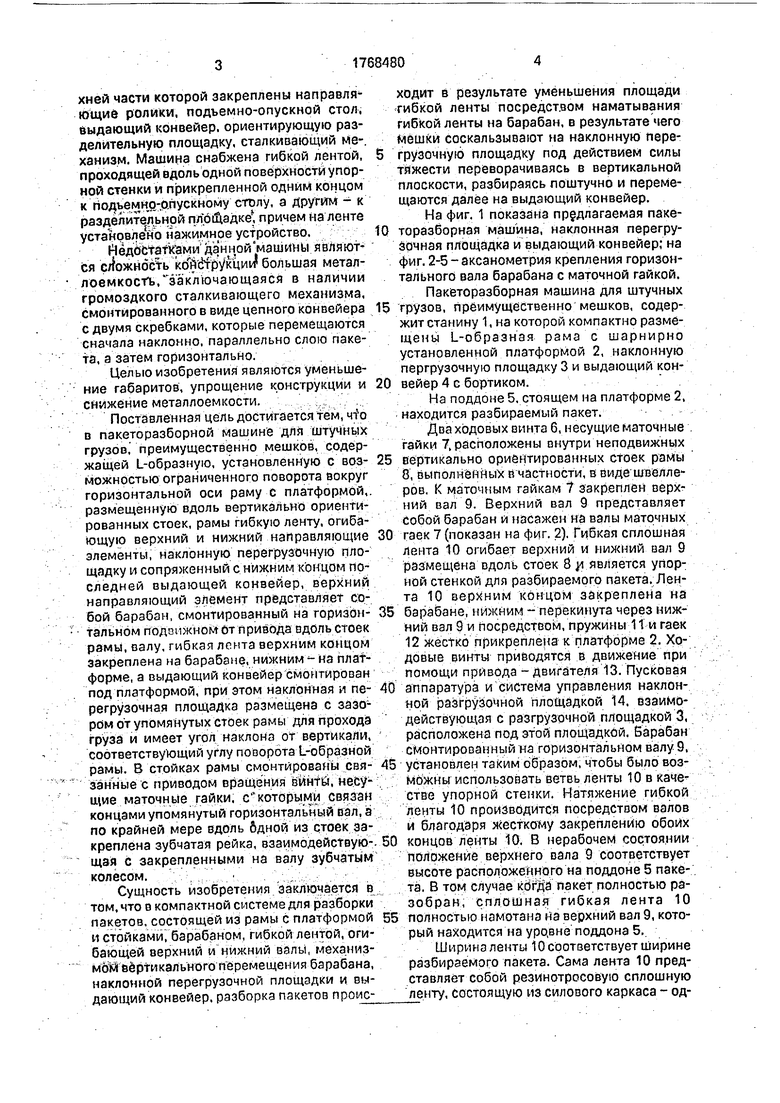
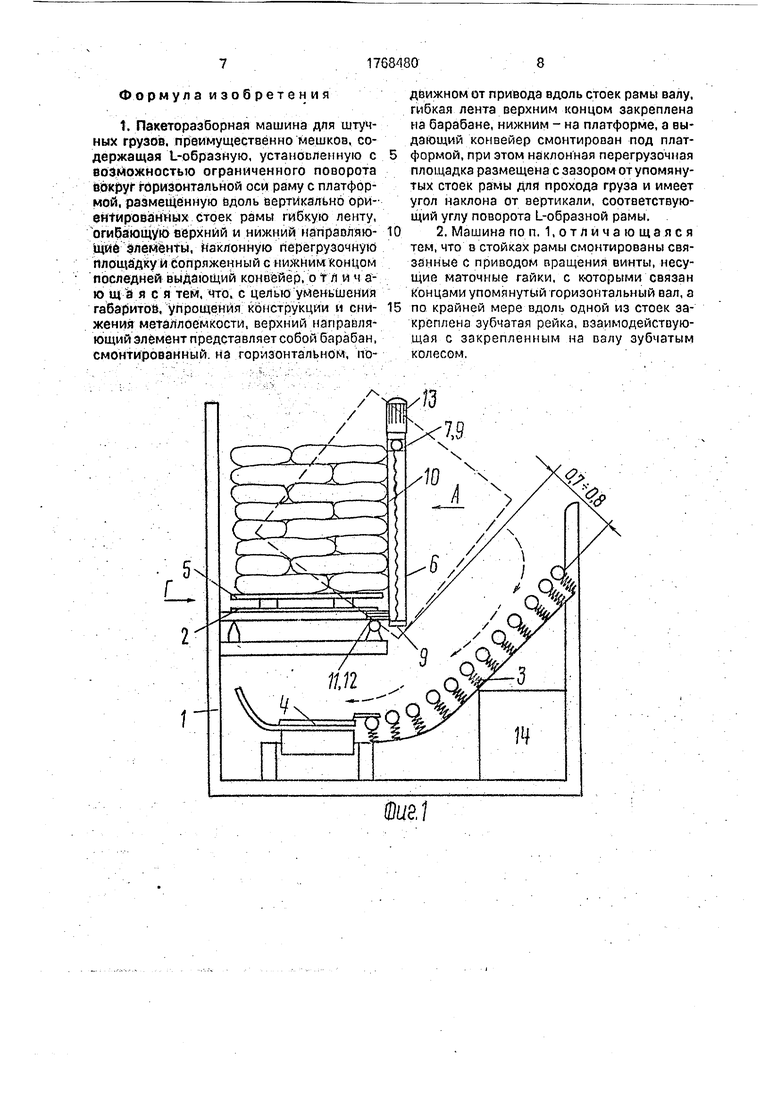
Сущность изобретения заключается в том, что в компактной системе для разборки пакетов, состоящей из рамы с платформой и стойками, барабаном, гибкой лентой, огибающей верхний и нижний валы, механизмом вертикального перемещения барабана, наклонной перегрузочной площадки и выдающий конвейер, разборка пакетов происходит в результате уменьшения площади гибкой ленты посредством наматывания гибкой ленты на барабан, в результате чего мешки соскальзывают на наклонную перегрузочную площадку под действием силы тяжести переворачиваясь в вертикальной плоскости, разбираясь поштучно и перемещаются далее на выдающий конвейер. На фиг. 1 показана предлагаемая паке0 торазборная машина, наклонная перегрузочная площадка и выдающий конвейер, на фиг. 2-5-аксанометрия крепления горизонтального вала барабана с маточной гайкой. Пакеторазборная машина для штучных
5 грузов, преимущественно мешков, содержит станину 1, на которой компактно разме- щены L-образная рама с шарнирно установленной платформой 2, наклонную пергрузочную площадку 3 и выдающий кон0 вейер 4 с бортиком.
На поддоне 5. стоящем на платформе 2, находится разбираемый пакет.
Два ходовых винта 6, несущие маточные гайки 7, расположены внутри неподвижных
5 вертикально ориентированных стоек рамы 8, выполненных в частности, в виде швеллеров. К маточным гайкам 7 закреплен верхний вал 9. Верхний вал 9 представляет Собой барабан и насажен на валы маточных
0 гаек 7 (показан на фиг. 2). Гибкая сплошная лента 10 огибает верхний и нижний вал 9 размещена вдоль стоек 8 у является упорной стенкой для разбираемого пакета. Лента 10 верхним концом закреплена на
5 барабане, нижним - перекинута через нижний вал 9 и посредством, пружины 11 и гаек 12 жестко прикреплена к платформе 2. Ходовые винты приводятся в движение при помощи привода -двигателя 13. Пусковая
0 аппаратура и система управления наклонной разгрузочной площадкой 14. взаимодействующая с разгрузочной площадкой 3, расположена под этой площадкой. Барабан смонтированный на горизонтальном валу 9,
5 установлен таким образом, чтобы было возможны использовать ветвь ленты 10 в качестве упорной стенки. Натяжение гибкой ленты 10 производится посредством валов и благодаря жесткому закреплению обоих
0 концов ленты 10. В нерабочем состоянии положение верхнего вала 9 соответствует высоте расположенного на поддоне 5 пакета. В том случае когда пакет полностью разобран, сплошная гибкая лента 10
5 полностью намотана на верхний вал 9, который находится на уро.вне поддона 5.
Ширина ленты 10 соответствует ширине разбираемого пакета. Сама лента 10 представляет собой резинотросовую сплошную ленту, состоящую из силового каркаса - одного ряда стальных проволочных канатиков - и нескольких тканевых прокладок, служащих для связи силового каркаса и наружных резиновых обкладок в единое целое.
Механизм вращения вокруг оси и перемещения верхнего валика, помимо перемещения верхнего вала 9 вверх или вниз посредством движения ходовых винтов б, несущих маточные гайки 7, производит одновременно и его вращение вокруг своей оси, которое происходит посредством движения зубчатого колеса 15, закрепленного к верхнему валу 9 по вертикальной зубчатой рейке, размещенной вдоль одной из стоек рамы 8. Ход двух ходовых винтов 6 с гайками 7, возбуждаемый двигателем-приводом 13, благодаря работе трех подшипников 17, зубчатых шестерней 18 и цепи 19 происходит синхронно.
Нёклонная разгрузочная площадка 3 установлена с зазором от стоек рамы 8 под углом естественного откоса штучных грузов на расстоянии а 0.7-0,8 длины мешка. Нижняя граница выбранного расстояния, а обусловлена следующим: предупреждается заклинивание меш;сов между пакетов и разгрузочной площадкой 3, а также затаривание на выдающем конвейере 4. Верхняя граница обусловлена сохранностью груза за счет возможности переворота мешков в вертикальной плоскости при соскальзывании на площадку 3, поштучным разделением мешков в процессе соскальзывания. Разгрузочная площадка 3 состоит из ряда подпружиненных роликов 20 и сопряжена нижним концом выдающего конвейера 4, который установлен под разбираемым пакетом. Ролики 20 разобщены, длина каждого равна ширине разбираемого мешка, имеют свободное вращение и насажены на общий вал 21, на котором закреплены подшипники 22. Упругость подпружиненных роликов 20 обусловлена наличием пружины 23 с нижним телескопическим и устройством 24 (труба в трубе), где одна из двух труб жестко прикреплена к основанию площадки 3. В нижней части к каждому свободно вращаю- щемуся ролику 20 подведена тормозная система, состоящая из тормозной колодки 25, пружины 26 и электромагнитов 27, Тормозная система и телескопическое устройство 42 взаимодействуют с системой управления, а затем - с пусковой аппаратурой 14 разгрузочной площадки 3.
Изобретение осуществляется следующим образом.
После подачи пакета автопогрузчиком на платформу 2, автопогрузчиком осуществляется наклон разбираемого пакета в сторону перегрузочной площадки 3 на угол, не
меньше угла естественного откоса штучных грузов.
Пакет при этом опирается на сплошную гибкую ленту 10, являющуюся гибкой стенкой. Опорная поверхность гибкой ленты 10 является плоскостью. РасГюложение верхнего вала 9 соответствует высоте разбираемого пакета. Верхний ряд мешков начинает разбираться следующим образом.
Привод 13 приводит в движение ходовые винты 6, расположенные в стойках рамы
8,с маточными гайками 7 посредством работы четырех подшипников 17, зубчатых шестерней 18 и цепи 19. Маточные гайки 7
синхронно двигаются вниз, заставляя одновременно перемещаться вниз и верхний вал
9.При этом движении зубчатое колесо 15, прикрепленное к валу 0, сцепленное с вертикальной зубчатой рейкой 16, расположенной вдоль одной стойки 8, приводит верхний вал 9 во вращение вокруг своей оси, что влечет наматывание гибкой ленты 10. Барабан наматывая гибкую ленту 10 при своем движении вниз, тем самым уменьшает площадь упорной стенки. Мешки верхнего ряда, не имея упора, перемещаются на перегрузочную площадку 3, откуда попадает на выдающий конвейер 4.
При перемещении вниз маточных гаек 7 с верхним валом 9, происходит дальнейшее равномерное наматывание гибкой ленты 10 на барабан. Таким образом разбирается следующий ряд мешков.
Попадая на перегрузочную площадку 3, мешки из разбираемого слоя пакета переворачиваются в вертикальной плоскости и перемещается по площадке 3 за счет силы тяжести, а ускорение, полученное при падении на площадку 3, которое может привести к вылету мешка из выдающего конвейера 4, уменьшается благодаря работе тормозной системы подпружиненных роликов 20. При попадании мешка на подпружиненный ролик, под действием веса мешка пружина 23 сжимается, приведя в действие телескопическое устройство 24. Незакрепленная телескопическая труба смещается вниз, подавая сигнал в систему управления ориентирующей площадкой 14. Пусковая аппаратура и система управления площадкой 14 дает в определенной последоват ельности сигнал для работы тормозной системе, состоящей из тормозной колодки 25, пружины 26 и
электромагнитов 27.
После схода последнего слоя мешков производят возврат гибкой ленты 10 в исходное положение при помощи привода 13, перемещая барабан в верхнее положение.
Формула изобретения
t. Пакеторазборная машина для штучных грузов, преимущественно мешков, содержащая L-образную, установленную с возможностью ограниченного поворота вокруг горизонтальной оси раму с платформой, размещенную вдоль вертикально ориентированных стоек рамы гибкую ленту, огибающую верхний и нижний направляющий элементы, наклонную перегрузочную площадку и сопряженный с нижним концом последней выдающий конвейер, отличающаяся тем, что. с целью уменьшения габаритов, упрощения конструкции и снижения металлоемкости, верхний направляющий элемент представляет собой барабан, смонтированный на горизонтальном, подвижном от привода вдоль стоек рамы валу, гибкая лента верхним концом закреплена на барабане, нижним - на платформе, а выдающий конвейер смонтирован под платформой, при этом наклонная перегрузочная площадка размещена с зазором от упомянутых стоек рамы для прохода груза и имеет угол наклона от вертикали, соответствующий углу поворота L-образной рамы.
2, Машина по п. 1, отл ича ю щаяся тем, что в стойках рамы смонтированы связанные с приводом вращения винты, несущие маточные гайки, с которыми связан концами упомянутый горизонтальный вал, а
по крайней мере вдоль одной из стоек закреплена зубчатая рейка, взаимодействующая с закрепленным на валу зубчатым колесом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для разборки пакетовшТучНыХ гРузОВ | 1979 |
|
SU816916A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1761648A2 |
| Пакеторазборное устройство | 1988 |
|
SU1684197A1 |
| Склад для хранения штучных грузов | 1976 |
|
SU734088A1 |
| Устройство для разбора пакета штучных изделий | 1986 |
|
SU1381043A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Устройство для разборки пакета штучных грузов | 1985 |
|
SU1350089A1 |
| Пакеторазборная машина для штучных грузов | 1972 |
|
SU474479A1 |
| Устройство для перегрузки штучных грузов | 1989 |
|
SU1722996A1 |
| КРАНОВАЯ УСТАНОВКА С ТРАНСПОРТНОЙ СИСТЕМОЙ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1990 |
|
RU2041854C1 |


Изобретение относится к устройствам для автоматизации и механизации логрузо- разгрузочных работ и предназначено для порядной разборки пакетов штучных грузов, например коробок или мешков с выпучим материалом; -Цель: упрощение конструкции, снижение ее металлоемкости, увеличение ее компактности. Сущность: на станине размещены L-образная рама с шар- нирно установленной платформой, наклонная перегрузочная площадками выдающей конвейер. Платформа снабжена механиз- мом вращения вокруг оси и перемещения верхнего вала, гибкой лентой, огибающей верхний и нижний валы. Меха н изм5 вращения и перемещения представлен ходовыми винтами с маточными гайками, установленными в стойках рамы. Разборка пакетов происходит в результате наматывания гибкой ленты на верхний вал. Разбираемые поштучно, под действием силы тяжести, переворачи ва5Гсь в вертикальной плоскости при соскальзывании, мешки попадают на перегрузочную Гтощадку из Подпружиненных роликов и перемещаются на выдающий конвейер. 1 з.п. ф-лы, 5 ил. сл С
00
I
у
11A J. АААЛЛ
c
3
en
/
08t89U
|СП
I Jfj
&
CO Cr
F®
C30
i
СЭО
ДО/гЗ
Ш2Л
/7/20
Вид Д
ваг 5
| Машина для разборки пакетовшТучНыХ гРузОВ | 1979 |
|
SU816916A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
