Изобретение относится к устройствам для пакетирования и транспортирования штучных грузов.
Цель изобретения - расширение функциональных возможностей путем обеспечения загрузки транспортных средств.
На фиг.1 изображена схема системы вид сбоку; на фиг.2 - то же, вид сверху; на фиг.З - сечение А-А на фиг.2;на фиг.4 - вид Б на фиг.2; на фиг.З - устройство для пакетирования, вид сверху; на фиг.6 - то же, вид сбоку; на фиг.7 - поддон со стропами, вид сверху; на фиг.8 - устройство переключателя для подачи поддонов с грузом на направляющие конвейеров , вид сверху; на фиг.9 - то же, вид сбоку; на фиг.10 устройство для стыковки с транспортным средством, общий ввд;на фиг.11 - концевые направляющие, общий вид.
Система содержит два цепньк конвейера 1, устройство 2 для паке- тирования грузов, устройство 3 для подачи пакетов 4 на конвейеры 1, устройство 5 для стыковки конвейеров 1 с направляющими 6 транспортного средства 7. Устройство 2 для пакетиро- вания штучных грузов включает механизм 8 подачи порожних поддонов 9, механизм 10 для подвешивания пакетов 4 на желоб 1 устройства 3 для подачи пакетов, конвейер 12 с плужками 13 и 14, последний из которых 14 жестко крепится к раме 15 конвейера 12, дополнительные конвейеры 16 с подпружиненными: лотками 17, платформу 18, которая при помощи гидро- привода 19 может совершать возвратно-поступательные движения в вертикальных направляющих (не показаны) шахты 20. Механизм 8 для подачи порожних поддонов-9 к платформе 18 устройства 2 для пакетирования содержит ленточный конвейер 21, установленный перпендикулярно к контейнеру 12, шахту 22 для порожних поддонов 9, выполненную в сечении по перимет- ру раскрытого поддона со стропами и расположенную над ленточным конвейером 21 на расстоянии, равном толщине одного порожнего поддона, две направляющие 23 под каретки 24 поддона 9, два цепных конвейера 25, состыкованные с направляющими 23 на одной прямой линии. Цепи 26 конвейеров 25 имеют желобообразную несу-.
щую поверхность и закрыты кожухами 27, которые имеют в оконечностях ог- раничители 28, на которых установлены выключатели для выключения ленточного конвейера 21 механизма 8 для подачи порожних поддонов 9, и выключатель для включения конвейера 1 2 устройства 2 для пакетирования грузов.
Механизм 10 для подвешивания пакетов 4 на желоб 11 содержит две направляющие полки 29 с кожухами 30, закрепленные консольно к верхней части шахты 20 устройства 2 для пакетирования и вдоль диаметральной оси платформы 18 этого устройства 2. Направляющие полки 29 состыкованы с цепными конвейерами 25 механизма 8 для подачи порожних поддонов 9.Механизм 10 для подвешивания пакетов 4 содержит также две параллельные рейки 31, установленные наклонно к плоскости платформы 18 устройства 2 для пакетирования в сторону устройства 3 с возможностью возвратно-поступательного движения, обеспечивающегося с помощью пневмоцилиндра 32. Плоскость, в которой движутся рейки 31, находится ниже направляющих полок 29 механизма 0 для подвешивания пакетов и над плоскостью платформы 18 устройства 2 для пакетирования. Устройство 3 для подачи пакетов 4 на конвейеры 1 выполнено в виде наклонного желоба 11, разветвленного на две ветви 33, 34 аналогичной конструкции, которые связаны косицей 35. На этой косице на оси 36 крепится переключатель в виде коромысла 37, один конец которого имеет вид прямоугольного стержня 38, хвостовая часть коромысла, а к второму прикреплена поперечина 39, имеющая форму ласточкина хвоста. Сам желоб П в месте разветвления имеет вырезы 40 для хвостовой части коромысла 37 в Bi-ще секторов с центром на оси (коромысла) . Цепные конвейеры 1 установлены параллельно на опорах 41 в- подвешенном виде. Цепи 42 конвейеров 1, несущие толкатели 43 кареток, расположены горизонтально над направляющими 44. конвейеров 1 в ограничительных кожухах 45, имеющих продольные вырезы 46 под толкатели 43.
Цоддон 9 представляет собой соединение основания 47 с жестким каркасом 48 в виде прямоугольной металлической рамы с усиленными продоль-
ными балками круглого сечения и гибких строплент 49. К другим концам строплент 49 крепятся каретки 24. Устройство 5 для стыковки конвейеров 1 с направляющими 6 транспортного средства 7 выполнено в виде металлического П-обраэного корпуса 50 с отогнутыми боковыми стенками 5J, который установлен на рельсах 52, с возможностью поперечного перемещения относительно конвейеров 1 . На внутренней поверхности полки 53 корпуса 50 установлены направляющие 54, имеющие конструкцию, аналогичную направляющим 44 конвейеров 1. К этим направляющим 54 с обеих сторон шар- нирно прикреплены концевые направляющие 55, которые состоят из двух параллельных стержней 56, закрытых кожухами 57 и сочлененных друг с другом с возможностью осевого перемещения. Сверху на полке 53 корпуса 50 устройства 5 для стыковки установлены звездочки 58 конвейеров 1. Ведущи звездочки 59 этих конвейеров приводятся в действие с помощью привода 60 с шаговым двигателем 61. На направляющих 44 конвейеров 1 в точках их соединения с устройством 3 для подачи поддонов 9 с пакетами установлены выключатели, включающие в работу шаговый электродвигатель 61. На раме 41, установленной у устройства
и тот же, то и они (цепные транспортеры) приводятся в действие. Нижний поддон 9, лежащий на ленточном конвейере 21 , полут1ает вместе с ним движение в направлении к платформе 18 устройства 2 для пакетирования. При этом каретки 24 поддона 9, в начальный момент лежащие на направляющих 23 механизма 8 для подачи порожних поддонов, начинают скользить в этих направляющих, а затем попадают на несущую желобообразную поверхность цепных конвейеров 25 этого же механизма. В таком состоянии и в раскрытом виде порожний поддон 9 ока зьюается над платформой 18 устройства 2 для пакетирования. При этом кожухи 27 механизма 8 для подачи порожних поддонов предотвращают соскакивание кареток 24 с направляющих 23 и с нес5Ш1ей поверхности ленточных конвейеров 25 Каретки 24 поддона 9 под действием силы трения доходят до ограничителей 28, на которых установлены выключатели.
При нажатии кареткой на один из выключателей ленточный конвейер 21 и два цепных конвейера 25 механизма 8 выключаются, а при нажатии на другой включается конвейер 12. Груз начинает поступать по конвейеру 2 к платформе 18. Дойдя до плужка 14, груз поворачивается на 90 и подхва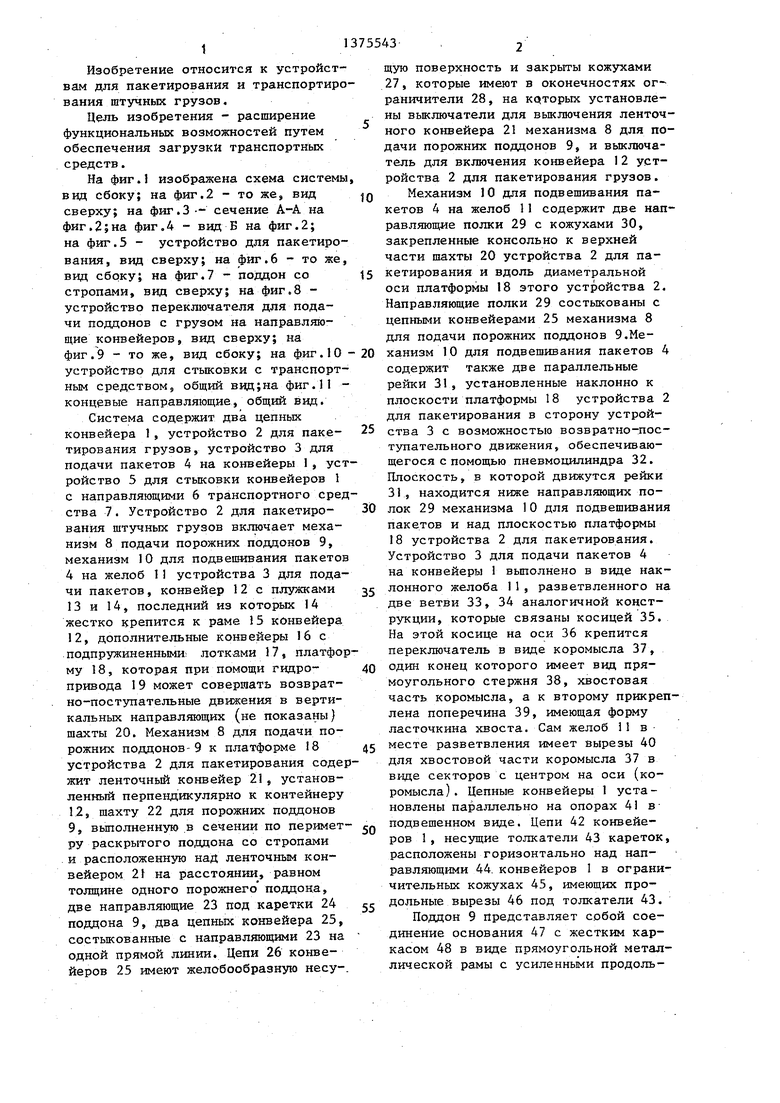


| название | год | авторы | номер документа |
|---|---|---|---|
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| Установка для упаковки изделий | 1981 |
|
SU1034949A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| Устройство для ориентирования изделий | 1982 |
|
SU1121207A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА ДЛЯ ГРУЗОВ В МЯГКОЙ ТАРЕ | 1969 |
|
SU414165A1 |
| Пакеторазборная машина для штучных грузов | 1972 |
|
SU474479A1 |
| Технологическая линия для изготовления строительных изделий | 1985 |
|
SU1296430A1 |





: Изобретение относится к устройствам для пакетирования и транспортирования штучных грузов и позволяет расширить функциональные возможности путем обеспечения загрузки транспортных средств. Система включает в себя устройство 2 для пакетирования грузов, механизм 8 подачи поддонов на устройство 2 для пакетирования, устройство для подачи пакетов на один из двух конвейеров 1 и устройство 5 7//////7////7/77/////77/7 для стыковки конвейеров 1 с транспортным средством. Устройство 2 для пакетирования выполнено в виде ленточного конвейера со сталкивателями и снабжено установленными перпендикулярно к нему с наклоном в вертикальной плоскости дбполнительными конвейерами и лотками для направления пакетов грузов на поддон,- который имеет стропы с каретками, установленными с возможностью перемещения в направляющих устройства 2 для пакетирования, снабженного подъемно- опускной платформой для установки поддона. При подаче пакетов грузов на поддон последний опускается с платформой, при этом стропы с каретками сближаются, перемещаются по устройству для подачи пакетов на один из двух конвейеров 1, снабженных направляющими для кареток, и посредством устройства 5 для стыковки подаются в транспортное средство. 2 з.п.ф-лы, П ил. i (/; с со -vl ел СП оо Фиг.1
5 для стыковки конвейеров I, установ- ,с тывается вспомогательным конвейером
лен выключатель, включающий цепные конвейеры 1 вне зависимости от действия выключателя щагового электродвигателя.
. Система работает следзтощим обра- дО зом.
Перед началом работы порожние поддоны 9 загружены в шахту 22 механизма 8 для подачи порожних поддонов. Платформа 18 устройства 2 для паке- 45 тирования штучных грузов находится в крайнем верхнем положении. Параллельные рейки 31 механизма 10 для подвешивания поддонов находятся у краев шахты 20 устройства 2 для пакетирова- Q кия, платформа 18 раскрыта. Подпрзтеи- ненные лотки 17 находятся в поднятом состоянии. Управляемые плужки 13 устройства 2 для пакетирования прижаты к раме 15 контейнера 12.ее
Вначале работы включают конвейер 21 механизма 8 для подачи .порожних поддонов. Так как привод у этого кон-: вейера и у цепных конвейеров 25 один
ряда лоток 17 нажимает на контакт электромагнита (не показан), который в первоначальньй момент приводит в действие пневмоцилиндры 32, которые толкают по направлению друг к другу обе параллельные рейки 31., а затем подает команду на гидропривод 19 для опускания платформы 18 вниз. При этом верхняя часть строплент 49 поддонов 9 оказывается между концами параллельных реек 31.
При опускании платформы 18 с поддоном 9 каретки 24 скатьшаются с направляющих полок 29 механизма О на рейки 31. При дальнейшем опускании плтатформы каретки с пакетом за висают на параллельных рейках 31. Поскольку последние имеют наклон в сторону устройства 3, каретки с пакетом скатываются по рейкам 31 на каклонньй желоб 1I этого устройства 3. Так как последний имеет наклон в сторону цепных конвейеров 1, каретки 24 с поддоном перемещаются по желобу 11 и попадают на одну из ветвей (в частности на ветвь 34J , не закрытую хвостовой частью стержня 38. При движении кареток первая из них толкает поперечину 39 коромысла, в результате чего разворачивает его относительно оси 36 и перемещает хвостовую часть стержня 38 на другой секторный вырез, перекрывая ветвь 34 и открьюая ветвь 33. Таким образом, обеспечивается (регулируется) поочередная подача пакетов 4 на обе линии цепных конвейеров I. При попадании пакета 4 на направляющую 44 одного из конвейеров I его передняя каретка нажимает на выключатель , включая шаговьй электродвигатель 6, который через привод 60 цепного конвейера 1 продвигает пакет 4 по линии на величину длины одного пакета /равной расстоянию между ка- . ретками .
Таким путем до подачи транспортного средства 7 загружаются равномерно обе линии цепных конвейеров 1, на которых пакеты 4 находятся в подвешенном виде на каретках вплотную друг к другу. С подходом транспортно го средства производится стыковка его направляющих 6 с направляющими 44 цепных конвейеров 1. Это осуществ ляется следующим образом. При движении назад транспортное средство 7 попадает между боковыми стенками
51 корпуса 50 устройства 5 для стыковки, в результате чего корпус 50, установленный на рельсах 52, центрируется на одной линии с транспортньм средством 7. После этого направляющие 6 соединяются с направляющими 54 корпуса 50 с помощью концевых направляющих 55. Конструкция концевых направляющих 55 позволяет обеспечить поперечное движение корпуса 50 относительно линии конвейера 1 , а также соединить направляющие 6 транспортного средства 7 с направляющими
44 конвейеров даже при наличии не- которых неточностей при подходе транспортного средства. После этого транспортное, средство готово к погрузке пакетов 4. Далее включают
выключатель, который приводит в действие обе линии конвейеров 1, и пакеты 4 загружаются в транспортное средство. Для выгрузки стропподцо- нов из транспортного средства используется аналогичная транспортная система, из которой исключены устройство 2 для пакетирования щтуч- ных грузов и устройство 3 для подачи стропподдонов с грузопакетами на конвейеры.
Форм ула изобретения
35
50
имодействия с направляющими кузова транспортного средства, а с другой стороны установлены с возможностью поворота в горизонтальной плоскости дополнительные концевые направляющие шарнирно связанные с направляющими, которые закреплены на указанных цепных конвейерах, снабженных толкателями для .взаимодействия с установлен- ными на указанных направлякицих каретками со стропами для закрепления поддонов .
3
л
5
ретки, и установленную на основании с возможностью перемещения в верти- . кальной плоскости платформу для взаимодействия с поддоном, а с обеих сторон от конвейера для поддонов смонтированы дополнительные направляющие для кареток, приводимых цеп- ньми конвейерами.
Ч
А-А
Фиг,3
Фиг.М
23
11
иг.5
Фиг. 8
33
L / У i
-У-,-,,
55
G
Фиг В
Фиг.Ю
57
57
56
56,
Фиг.П
| Линия для пакетирования и транспортирования изделий на поддонах | 1981 |
|
SU1008116A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
