(54) УСТРОЙСТВО ДЛЯ ПОДАЧИ ПОДДОНОВ
1
Изобретение относится к упаковке, в частности к устройствам для подачи поддонов при упаковке рулонов холоднокатанной полосы или пакетов листов.
Известно устройство для подачи поддонов, включающее в себя накопитель поддо- 5 нов в виде стационарного стеллажа, на который краном устанавливается стопа поддонов, и механизм для переноса поддонов, выполненный в виде поворотной колонны с подъемно-опускным суппортом, несущим захват для поддонов, которая установлена на направляющих рельсах. По рельсам механизм для переноса поддонов перемещается к накопителю поддонов и обратно к месту установки поддона 1.
Однако устройство подачи поддонов име- 15 ет невысокую-производительность ввиду длительности цикла переноса поддона от накопителя к месту его установки.
Длительность цикла вызвана наличием лишних перемещений по рельсам механизма п для переноса к накопителю поддонов и обратно; необходимостью выравнивания поддона по оси агрегата в горизонтальной плоскости, в случае, если поддон перекосится при его установке на место; отсутствием автоматической установки суппорта по высоте для ввода захватов в зазор между поддонами, установленными в стопу.
Кроме этого, занимается лишняя площадь под рельсами.
Цель изобретения - повышение производительности устройства путем ускорения процесса переноса поддонов от накопителя к месту упаковки.
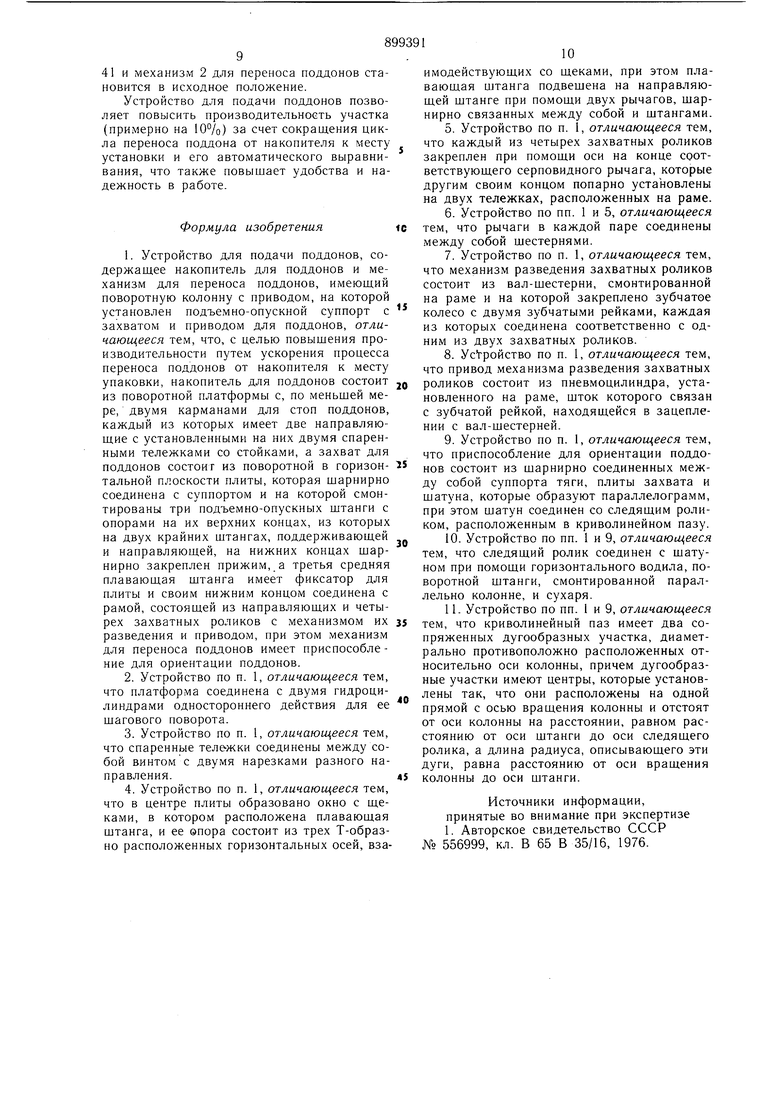
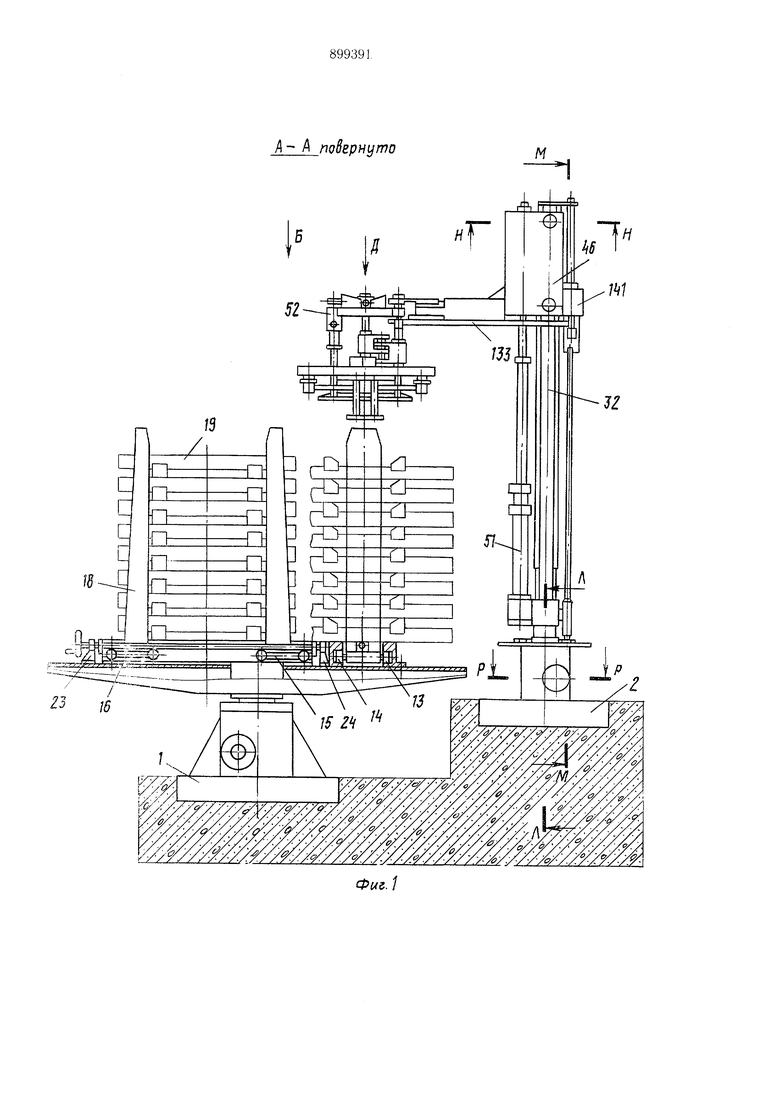
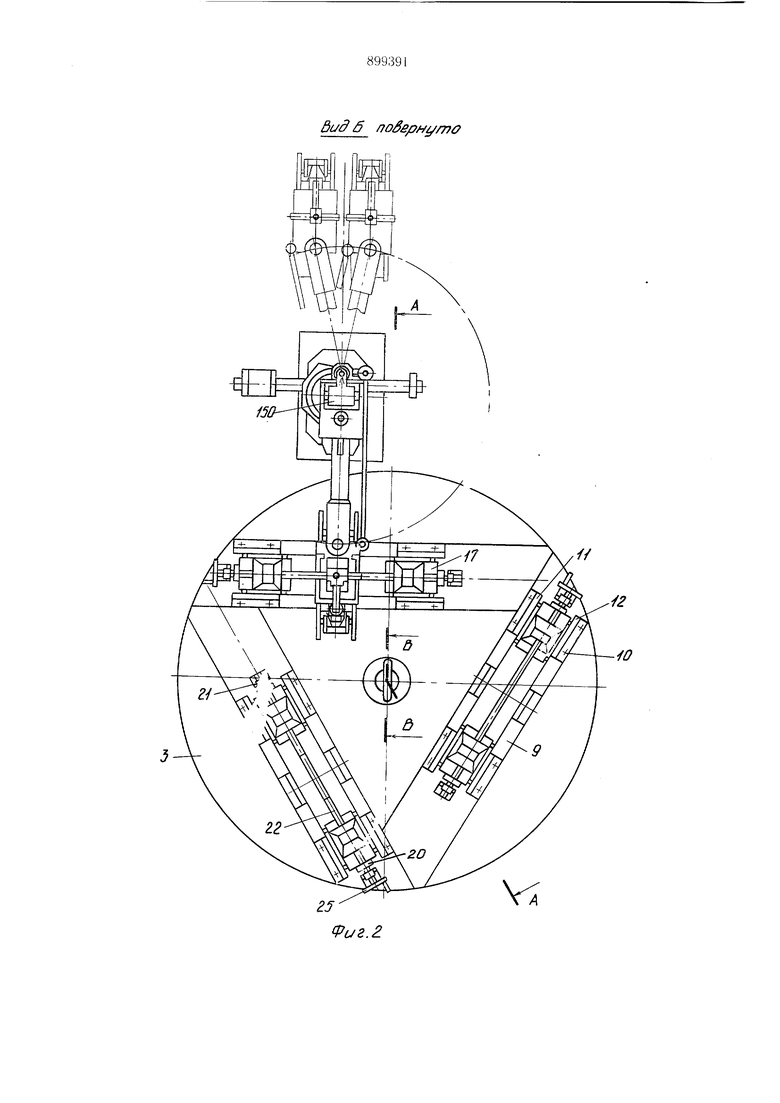
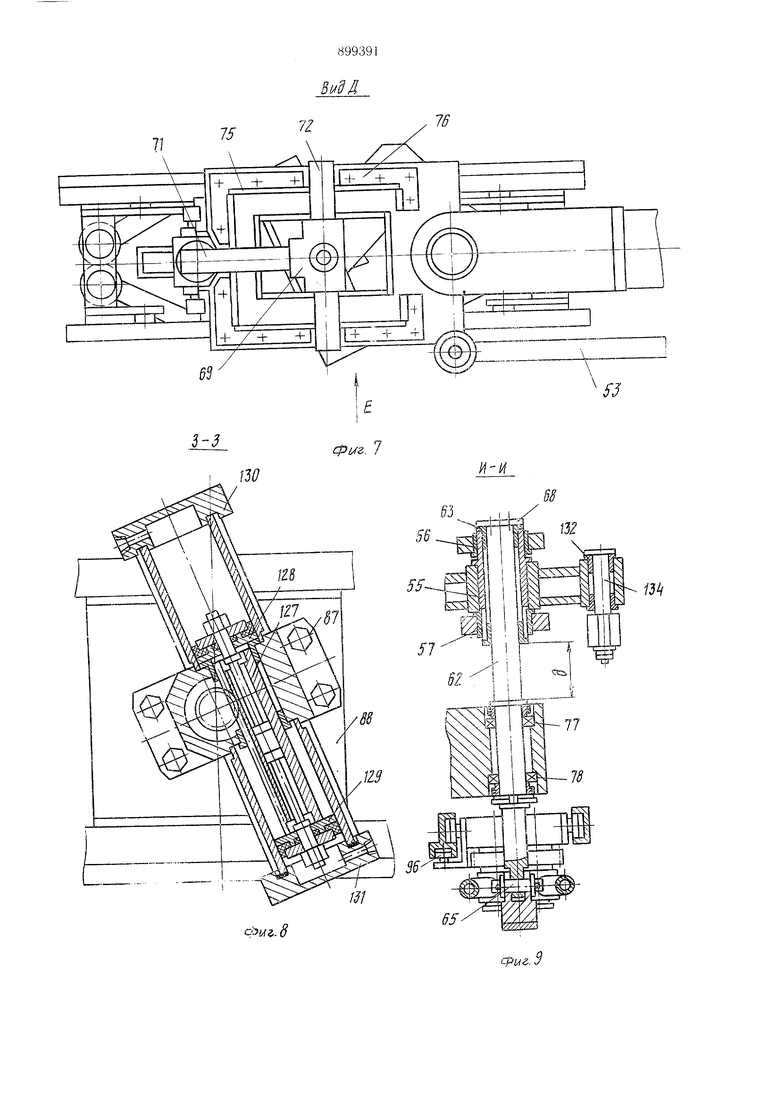
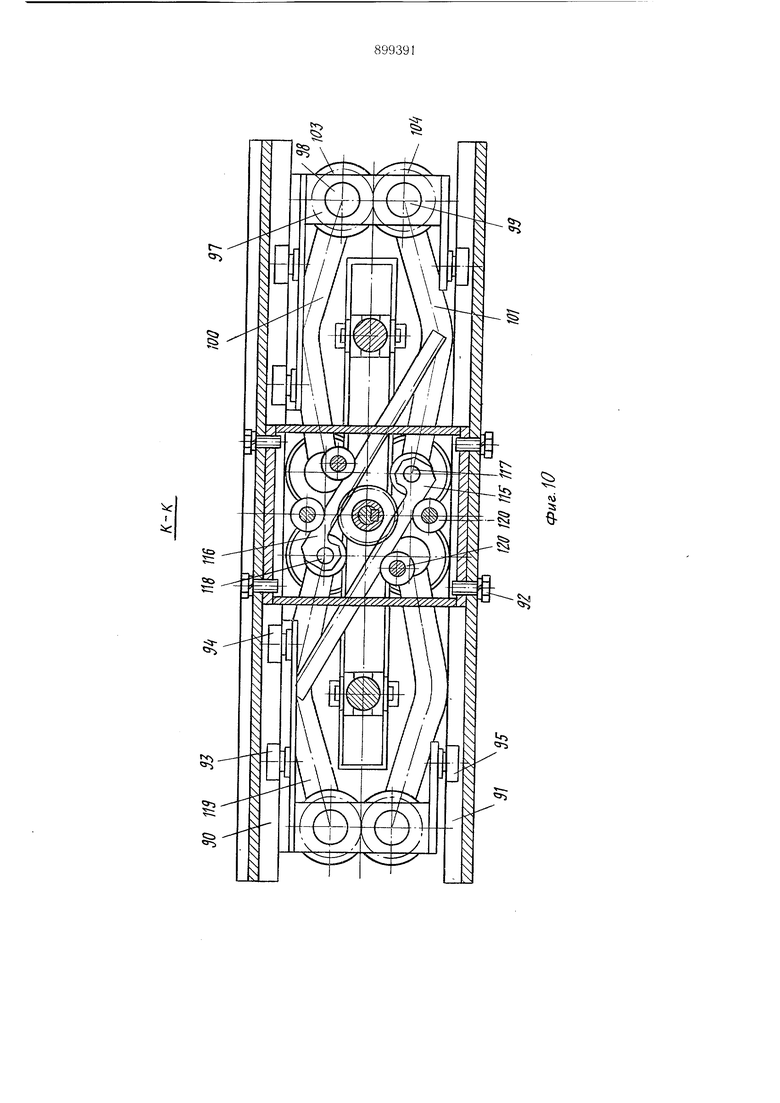
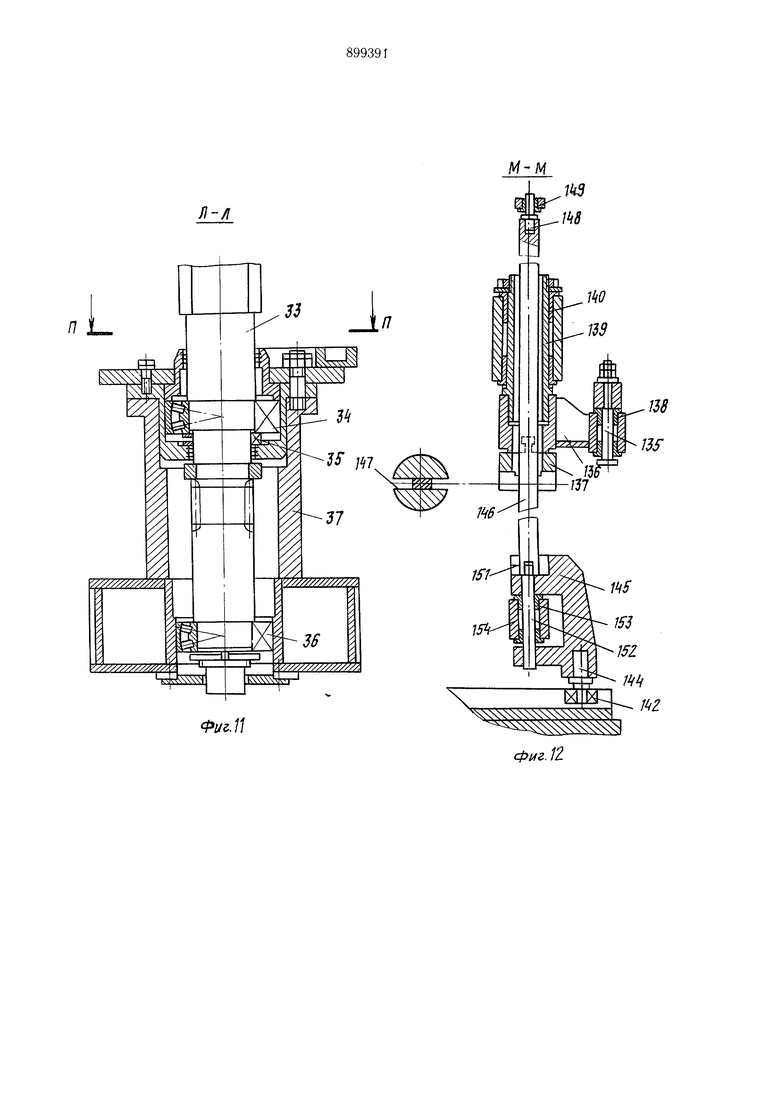
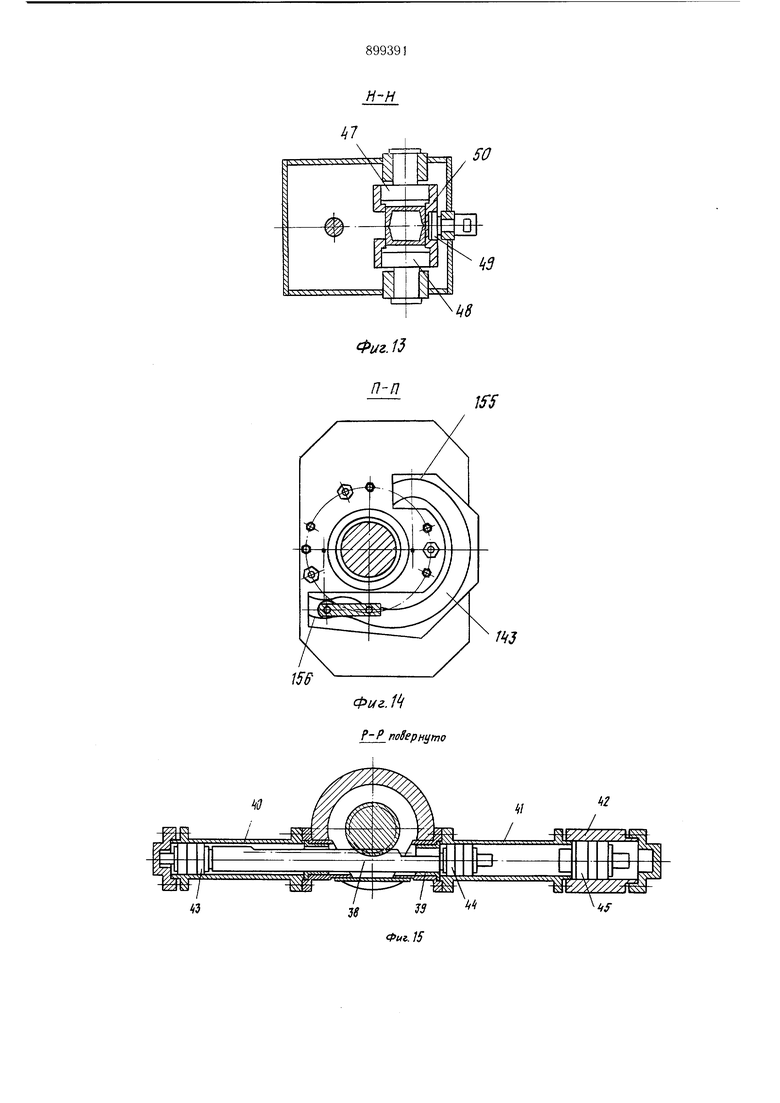
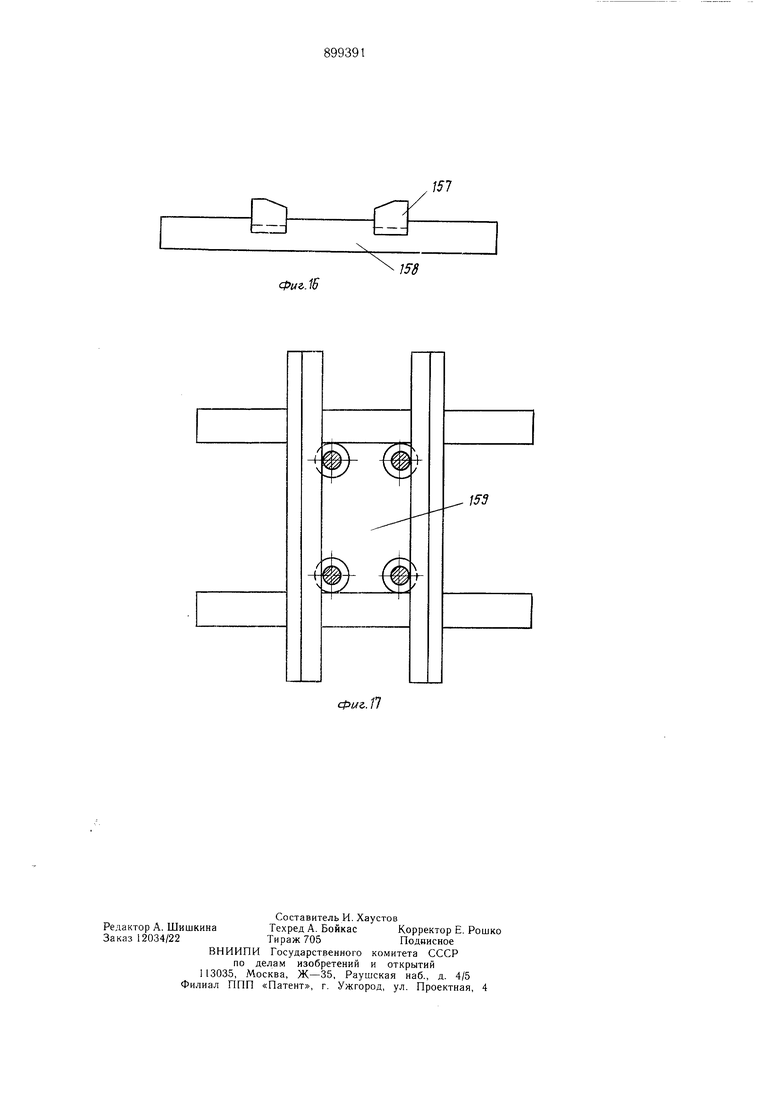
Эта цель достигается тем, что в устройстве для подачи поддонов, содержащем накопитель для поддонов и механизм для переноса поддонов, имеющий поворотную колонну с приводом, на которой установлен подъемно-опускной суппорт с захватом и приводом для поддонов, накопитель для поддонов состоит из поворотной платформы с, по меньщей мере, двумя карманами для стоп поддонов, каждый из которых имеет две направляющие с установленными в них двумя спаренными тележками со стойками, а захват для поддонов состоит из поворотной в горизонтальной плоскости плиты, которая шарнирно соединена с суппортом и на которой смонтированы три подъемноопускных щтанг и с опорами на их верхни.х концах, из которых на двух крайних Гмнга-х, поддерживающей и на-правляющеи, на нижних концах шарнирно закреплен прижим, а третья средняя плавающая штанга имеет фиксатор для плиты и своим нижним концом сосмипепа с рамой, состоящей из направляющих и четырех захватных роликов с механизмом из разведения и приводом, при этом механизм для переноса поддонов имеет при.способление для ориентации поддонов. Кроме этого, платформа соединена с двумя гидроцилиндрами одностороннего действия для ее щагового поворота. Спаренные тележки соединены между собой винтом с двумя нарезка.ми разного направления. Б центре плиты образовано окно с щеками в котором расположены плавающая щтанга, и ее опора состоит из трех Т-образно расположенных горизонтальных осей, взаимодействующих со щеками, при этом плавающая щтанга подвещена на направляющей щтанге посредством двух рычагов, щарнирно связанных между собой и щтангами. Каждый из четырех захватных роликов 20 и закреплеп при помощи оси на конце соответствующего серповидного рычага, которые другим своим концом попарно установлены на двух тележках, расположенных на ра.ме. При этом рычаги в каждой паре соединены между собой щестернями. Механизм разведения захватных роликов состоит из вал-щестерни, смонтированной на раме и на которой закреплено зубчатое колесо с дву.мя зубчатыми рейками, каждая из которых соединена соответственно с одним из двух захватных роликов. Привод механизма разведения захватных роликов состоит из пневмоцилиндра, установленного на раме, щток которого связан с зубчатой рейкой, находящейся в зацепле1ши с вал-щестерней. Приспособление для ориентации поддонов состоит из щарнирно соединенных между собой суппорта тяги, плиты захвата и щатуна, которые образуют параллелогра.мм. при этом шатун соединен со следящим роликом, расположенным в криволинейном пазу. Следящий ролик соединен с шатуном при но.мощи горизонтального водила, поворотной штанги, смонтированной параллельно колонне, и сухаря. Криволинейный паз, в который помещен следящий ролик, имеет два сопряженных дугообразных участка, диаметрально .противоположно расположенных относительно оси колонны, причем дугообразные участки имеют центры, которые установлены так, что они расположены на одной прямой с осью вращения колонны и отстоят от оси колонны на расстоянии, равном расстоянию от оси штанги до оси следующего ролика, а длина радиуса, описывающего эти дуги, равна расстоянию от оси вращения колонны до оси штаИги. На фиг. 1 изображен разрез А-А на фиг. 2; на фиг. 2 - вид Б на фиг. 1; на фиг. 3 - разрез В-В на фиг. 2; на фиг. 4 - разрез Г-Г на фиг. 3; на фиг. 5 - вид Е на фиг. 7; на фиг. 6 - разрез Ж-Ж на фиг. 5; на фиг. 7 - вид Д на фиг. 1; на фиг. 8 - разрез 3-3 на фиг. 5; на фиг. 9 - разрез И-И на фиг. 5; на фиг. 10 - разрез К-К на фи1. 5; на фиг. 11 - разрез Л-Л на фиг. 1; на фиг. 12 - разрез М-М на фиг. 1; на фиг. 13 - разрез Н-Н на фиг. 1; на фиг. 14 - разрез П-П на фиг. 11; на фиг. 15 - разрез Р-Р на фиг. 1; на фиг. 16 - поддон, общий вид; на фиг. 17 - то же, пл,..н. Устройство для подачи поддонов содержит накопитель 1 поддонов механизма 2 для переноса поддонов. Накопитель поддонов выполнен в виде круглой платформы 3, которая насажена на вертикальный вал-щестерню 4, установленный в станине 5 на подшипниках 6-8, имеет на поверхности три кармана 9, расположенные на одинаковом расстоянии от оси вращения платфор.мы и на равных расстояниях друг от друга. Каждый карман выполнен в виде закрепленных при помощи болтов 10 к платформе 3 двух тангенциально расположенных горизонтальных направляющих 11 и 12 с продольными паза.ми 13, в которых установлены на катках 14 две тележки 15 и 16, связанные между собой. Корпус 17 каждой тележки 15 и 16 выполнен с вертикальной направляющей стойкой 18, между которыми устанавливается стопа 19 поддонов. С целью переналадки накопителя 1 на другие размеры поддонов тележки 15 и 16 соединены между собой с возможностью их взаимного перемещения относительно друг друга. Для этого в корпусе 17 каждой тележки 15 и 16 закреплено по гайке 20 или 21, через которые пропущен винт 22 с двумя нарезками разного направления. Концы винта 22 установлены на подшипниках в стойках 23 и 24, расположенных по обе стороны от тележек и закрепленных жестко к платформе 3. На одном конце винта 22 закреплена рукоятка 25 для его вращения. Для щагового поворота платформы предусмотрены два гидроцилиндра 26 и 27 одностороннего действия, закрепленные на станине 5, на порщня 28 и 29 которых оперта своими концами зубчатая рейка 30, установленная во втулках 31, впрессованных в станине 5, и входящая в зацепление с валщестерней 4. Механизм для переноса поддонов содержит повоторную колонну 32, жестко закрепленную на валу-шестерне 33, который установлен на подшипниках 34-36 в неподвижной стойке 37 и находится в зацеплении с зубчатой рейкой 38, установленной во втулках 39, впрессованных в стойке 37, гидроцилиндры 40-42 с поршнями 43-45 закрепленные на стойке 37, суппорт 46, установленный на катках 47-49 в направляющих 50 колонны 32 с возможностью перемещения в вертикальном направлении от гидроцилиндра 51, закрепленного на колонне 32, и снабженный механизмом 52 захвата поддонов и приспособлением 53 ориентирования поддонов в горизонтальной плоскости. Механизм захвата поддонов выполнен в виде плиты 54, соединенной шарнирно при помощи впрессованной в нее втулки 55 и втулок 56 и 57 с суппортом 46, в которой смонтированы три штанги: поддерживающая щтанга 58, установленная во втулках 59, впрессованных в обойму 60, щарнирно связанную посредством осей 61 с плитой 54, направляющая штанга 62, установленная во втулках 63, впрессованных во втулку 55, и плавающая щтанга 64, установленная между поДлТ,ерживающей и направляющей щтангами и пропущенная через прямоугольное окно, выполненное в центре плиты 54. Поддерживающая 58 и направляющая 62 щтанги своими нижними концами с помощью осей 65 соединены с прижимом 66, а на их верхних концах закреплены щайбы 67 и 68, с помощью которых щтанги опираются на плиту 54. На верхнем конце плавающей щтанги 64 жестко закреплена опора 69 с тремя горизонтальными, соединенными между собой Т-образно, осями 70-72, которые входят в зазоры а между щека.ми 73 и 74, 74 и 75, 75 и 76, закрепленными по периметру окна плиты 54. Это позволяет зафиксировать плавающую щтангу 64 в горизонтальном направлении относительно плиты 54. На штанге направляющей 62 на подщипниках 77 и 78 установлен рычаг 79, который при помощи оси 80 и подшипников 81 и 82 щарнирно соединен с рычагом 83, на котором на подщипниках 84 и 85 установлена плавающая штанга 64. Рычаги 79 и 83 связывают направляющую 62 и плавающую 64 штанги по вь соте и обеспечивают вертикальное положение плавающей щтанги 64. Нижний конец плавающей штанги 64 запрессован в пяту 86, к которой с помощью болтов 87 прикреплен корпус 88 рамы 89. Рама имеет две параллельные горизонтальные направляющие 90 и 91, которые закреплены с помощью болтов 92 на корпусе 88 с обеих сторон. В направляющих по обе стороны от корпуса 88 установлены на катках 93-96 две тележки, каждая из которых состоит из корпуса 97 с впрессованными в него двумя вертикальными осями 98 и 99 и двух горизонтальных серповидных рычагов 100 и 101, обращенных друг к другу своими вогнутыми поверхностями, которые с впрессованными Б них втулками 102 установлены на осях 98 и 99 и имеют соосные с этими осями, находящиеся в зацеплении друг с другом, зубчатые щестернп 103 и 104. Свободные концы 105 серповидных рычагов 100 и 101 имеют впрессованные в них оси 106 с установленными на них на подщипниках 107 захватными роликами 108, снабженными буртиками 109. Таким образом, захватные ролики 108 каждой тележки благодаря зубчатому зацеплению серповидных рычагов 100 и 101 могут разводиться относительно продольной оси рамы только зеркально и синхронно. Механизм 110 разведения захватных роликов 108 выполнен в виде вал-шестерни 111, который установлен на подшипниках 112 в стакане 113, закрепленном в корпусе 88 рамы 89, и на нижнем конце вал-щестерни 111 закреплено зубчатое колесо 114, входящее в зацепление с двумя диаметрально расположенными зубчатыми рейками 115 и 116, каждая из которых на одном конце имеет жестко закрепленную на ней ось: ось 117, соединяющую щарнирно рейку 115 с серповидным рычагом 101 одной тележки, и ось 118, соединяющую шарнирно рейку 116 с серповидным рычагом 119 другой тележки. Зубчатая рейка 115 аналогично зубчатой рейке 116 удерживается в зацеплении с зубчатым колесом 114 двумя роликами 120, установленными при помощи подшипников 121 на осях 122, впрессованных в щеки 123 и 124, установленные на стакане ИЗ с помощью подщипников 125 и 126, позволяющих щекам 123 и 124 поворачиваться вокруг оси зубчатого колеса 114 и на небольщой угол относительно друг друга вокруг той же оси. Вал-щестерня 111 входит в зацепление с зубчатой рейкой 127, по краям которой расположены порщни 128 и 129 пневмоцилиндров 130 и 131 одностороннего действия, прикрепленных к пяте 86. Приспособление ориентирования поддонов в горизонтальной плоскости при их установке включает в себя шарнирный параллелограмм, состоящий из плиты 54 с впрессованными в нее втулками 132, тяги 133 с прикрепленными на концах осями 134 и 135, щатуна 136 с сухарем 137 с впрессованными в него втулками 138, стаканом 139, установленным во втулках 140, впрессованных в корпус 141, который прикреплен к суппорту 46, и следящего ролика 142, расположенного в криволинейном направляющем пазу 143 и кинематически связанного через ось 144, водило 145 и штангу 146 с шарнирным параллелограммом. Штанга 146 имеет прямоугольное сечение и установлена паралельно оси колонны 32. Она проходит через отверстие в шатуне 136 и паз 147 в сухаре 137 и вверху щарнирно соединена с колонной 32 осью 148, установленной во втулке 149, которая впрессована в крыщку 150, прикрепленную к колонне 32, а внизу вхоит в паз 151 водила 145, которое щарнирно с помощью оси 152, установленной во втулках 153, соединено с выступом 154 колонны 32. Две стороны нларнирного параллелограмма - - суппорт 46 и тяга 133 всегда парал.лельны друг другу и занимают положение, зависящее от положения пор1;;ней 3-45 гидроцнлиндров 40-42. Две д;)угие стороны пара.члелограмма - плита 54 и п.1ат н 136 всегда занимают положение, параллельное положению водила 145, положение которого определяется конфигурацией криволиней пого направляющего паза 143, но которому обкатывается следящий ролик 142. Горизонтальный криволинейный направлиюигий наз 143 выполнен в виде двух криволинейных участков 155 и 156 в форме дуг окружностей, диаметрально расположенных относительно оси колонны, и плавно сопряженных между собой, причем центры бив радиусов онисывающих дуг 155 и 156 расположены на одной прямой с осью вращения колонны 32 на расстоянии, равном расстоянию от оси 152 до оси 144, а длина радиуса, описывающего эти дуги, равна расстоянию от оси вращения колонны 32 до оси 152. Каждый поддон состоит из двух верхних брусков 157, расположенных на некотором расстоянии друг от друга, и двух нижних брусков 158, расположенных перпендикулярно верхним и так же па некотором расстоянии друг от друга. Бруски имеют врезы и скреплены таким образом, что между брусками образуется окно 159. Устройство подачи поддонов работает следующим образом. В исходном положении суппорт 46 механизма переноса поддонов находится в поднятом положении и повернут вместе с колонной 32 в сторону накопителя 1 поддонов, а захватные ролики 108 сведены в центр механизма 52 захвата поддонов. С помощью рукоятки 25 вручную перемещают тележки 15 и 16 карманов 9, устанавливают расстояние между вертикальны.ми направляющими стойками 18, соответствующее размеру поддонов. Стопы поддонов .с помощью крана устанавливают в карманы 9 накопителя поддонов. Включаются гидроцилиндры 26 и 27 накопителя 1 поддон и платформа 3 поворачивается устанавливая у механизма 2 для пере носа поддонов требуемый карман 9 со стопой 19 поддонов. Включается гидроцилиндр 51 на опускание и суппорт 46 вместе с механиз.мом 52 захвата поддонов начинают опускаться. При подходе к брускам верхнего поддона стопы 19 поддонов прижим 66 ложится на эти бруски и останавливает опускание поддерживающей щтанги 58, направляющей щтанги 62, а с ней и плавающей щтапги 64, а суппорт 46 вместе с плитой 54 продолжает опускаться и после выбора свободного хода г и d останавливается. При этом предварительно сведенные пневмоцилиндром 130 захватные ролики 108 оказываются в окне 159 поддона и буртики 109 становятся ниже верхних брусков 157 поддона, а соединенные Т-образно между собой оси 70-72 выходят из зазоров а, предоставляя свободу плавающей щтанге 64 в горизонтальной плоскости. При включении пневмоцилиндра 131 зубчатая рейка 127 заставляет вращаться валшестерню 111 с зубчатым колесо.м 114, которое приводит в движение зубчатые рейки 115 и 116, раздвигающие оси 117 и 118 и связанные с ними серповидные рычаги 101 и 119, заставляющие раздвигаться захватные ролики 108. Эти ролики раздвигаются до упора в углы окна 159 поддона (см. фиг. 7) и сдвигают корпус 88 рамы 89 с направляющими 90 и 91, сов.мещая их оси симметрии с осями симметрии поддона, а вместе с ними и щтангу 64, плавающую с осями 70, 71. При включении гидроцилиндра 51 на подъем начинает подниматься суппорт 46 с плитой 54, а все три щтанги и прижим 66 остаются на месте. При этом оси 70-72 ложатся на наклонные поверхности 160 щек 73-76 и соскальзывают в зазоры а между этими щеками, смещая и разворачивая поддон в необходимое положение. При дальнейщем подъеме суппорта 46 плита 54 после выбора свободного хода относительно щтанг упирается в щайбы 67 и 68, с помощью которых она заставляет подниматься вместе с ней и щтанги 58, 62 и 64, причем захватные ролики 108 своими буртиками 109 подхватывают поддон за верхние бруски. После подъема суппорта 46 включается гидроцилиндр 40, порщень 43 которого заставляет перемещаться зубчатую рейку 38, поворачивающую вал-щестерню 33 вместе с колонной 32 и суппортом 46 до одного из двух положений в зависимости от положения порщня 45 гидроцилиндра 42. В этих двух положениях суппорта, а также в исходном положении, параллельность осевых линий поддонов обеспечивается приспособлением 53 ориентирования поддонов в горизонтальной плоскости. После поворота суппорт 46 опускается и после установки поддона на опорную поверхность прижим 66 ложится на верхние бруски поддона, щтанги останавливаются, а буртики 109 захватных роликов 108 при этом отходят от верхних брусков поддона вниз, так как расстояние е немного больще высоты поперечного сечения бруска поддона. При дальнейщем опускании суппорта выбирается свободный ход г и ( и суппорт останавливается, после чего включается пневмоцилиндр 130 и захватные ролики 108 сводятся в центр механизма 52 захвата поддонов. Включается гидроцилиндр 51 на подъем, суппорт 46 поднимается, включается гидроцилиндр 41 и механизм 2 для переноса поддонов становится в исходное положение. Устройство для подачи поддонов позволяет повысить производительность участка (примерно на 10%) за счет сокращения цикла переноса поддона от накопителя к месту установки и его автоматического выравнивания, что также повынлает удобства и надежность в работе. Формула изобретения 1. Устройство для подачи поддонов, содержащее накопитель для поддонов и механизм для переноса поддонов, имеющий поворотную колонну с приводом, на которой установлен подъемно-опускной суппорт с захватом и приводом для поддонов, отличающееся тем, что, с целью повыщения производительности путем ускорения процесса переноса поддонов от накопителя к месту упаковки, накопитель для поддонов состоит из поворотной платформы с, по меньщей мере, двумя карманами для стоп поддонов, каждый из которых имеет две направляющие с установленными на них двумя спаренными тележками со стойками, а захват для поддонрв состоит из поворотной в горизонтальнои плоскости плиты, которая щарнирно соединена с суппортом и на которой смонтированы три подъемно-опускных штанги с опорами на их верхних концах, из которых на двух крайних штангах, поддерживающей и направляющей, на нижних концах щарнирно закреплен прижим, а третья средняя плавающая штанга имеет фиксатор для плиты и своим нижним концом соединена с рамой, состоящей из направляющих и четырех захватных роликов с механизмом их разведения и приводом, при этом механизм для переноса поддонов имеет приспособле ние для ориентации поддонов. 2.Устройство по п. 1, отличающееся тем, что платформа соединена с двумя гидроцилиндрами одностороннего действия для ее щагового поворота. 3.Устройство по п. 1, отличающееся тем, что cnapeHHbie теле-жки соединены между собой винтом с двумя нарезками разного направления. 4.Устройство по п. 1, отличающееся тем, что в центре плиты образовано окно с щеками, в котором расположена плавающая штанга, и ее опора состоит из трех Т-образно расположенных горизонтальных осей, взаимодействующих со щеками, при этом плавающая штанга подвещена на направляющей щтанге при помощи двух рычагов, щарнирно связанных между собой и щтангами. 5.Устройство по п. 1, отличающееся тем, что каждый из четырех захватных роликов закреплен при помощи оси на конце соответствующего серповидного рычага, которые другим своим концом попарно установлены на двух тележках, расположенных на раме. 6.Устройство по пп. 1 и 5, отличающееся тем, что рычаги в каждой паре соединены между собой щестернями. 7.Устройство по п. 1, отличающееся тем, что механизм разведения захватных роликов состоит из вал-щестерни, смонтированной на раме и на которой закреплено зубчатое колесо с двумя зубчатыми рейками, каждая из которых соединена соответственно с одним из двух захватных роликов. 8.Устройство по п. 1, отличающееся тем, что привод механизма разведения захватных роликов состоит из пневмоцилиндра, установленного на раме, щток которого связан с зубчатой рейкой, находящейся в зацеплении с вал-щестерней. 9. Устройство по п. 1, отличающееся тем, что приспособление для ориентации поддонов состоит из щарнирно соединенных между собой суппорта тяги, плиты захвата и щатуна, которые образуют параллелограмм, при этом шатун соединен со следящим роликом, расположенным в криволинейном пазу. 10.Устройство по пп. I и 9, отличающееся тем, что следящий ролик соединен с щатуном при помощи горизонтального водила, поворотной штанги, смонтированной параллельно колонне, и сухаря. 11.Устройство по пп. 1 и 9, отличающееся тем, что криволинейный паз имеет два сопряженных дугообразных участка, диаметрально противоположно расположенных относительно оси колонны, причем дугообразные участки имеют центры, которые установлены так, что они расположены на одной прямой с осью вращения колонны и отстоят от оси колонны на расстоянии, равном расстоянию от оси щтанги до оси следящего ролика, а длина радиуса, описывающего эти дуги, равна расстоянию от оси вращения колонны до оси штанги. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 556999, кл. В 65 В 35/16, 1976.
А/
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Устройство для перемещения металлических деталей | 1981 |
|
SU1003977A1 |
| УСТРОЙСТВО для ЗАМЕНЫ ОБОЖЖЕННЫХ АНОДОВ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 1973 |
|
SU383757A1 |
| Полуавтомат для чистки валяной обуви | 1961 |
|
SU150636A1 |
| СССР ^'-* Hj.. ; ,;5КАТГ'МГ'Э- | 1964 |
|
SU163943A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Устройство для отделения листаОТ СТОпы и пОдАчи ЕгО B РАбОчуюзОНу пРЕССА | 1979 |
|
SU804112A1 |
| Многоярусная автостоянка | 2002 |
|
RU2224861C1 |
| Устройство для обвязки рулонов с поддоном | 1976 |
|
SU600033A1 |
| Устройство для переноса заготовок | 1979 |
|
SU812411A1 |

Г
Г
. 3
-5
Л
81
WZ
109
ВидД
фиг. 8
Фиг.. 9
I
it;
vi
п Фиг.11 Фиг. 12
п-п
/Л
Фиг. 1 -Р поЗернуто
Фиг,. 16
Фиг,. 17
