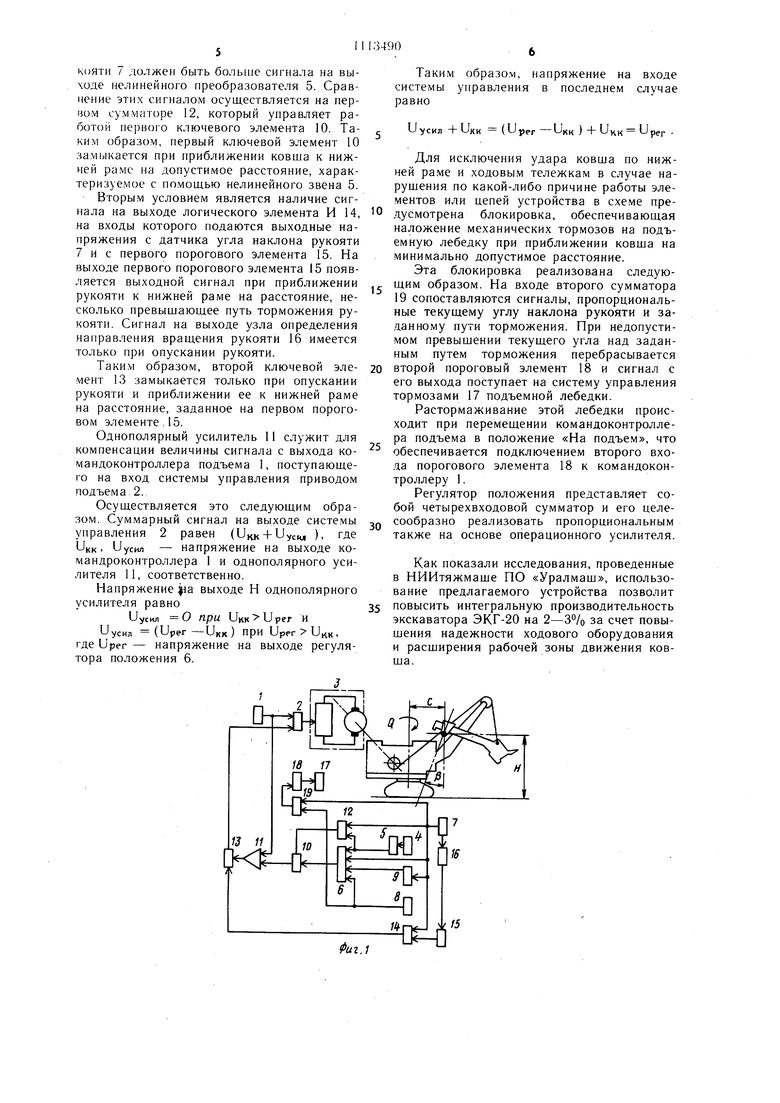
Изобретение (ггносится к системам управления и зашиты олнокопнювых экскаваторов типа «прямая лопата и предназначается д.1я защиты ходовых тележек и гусепиц от улара ковшом. Известно устройство , применяемое на эскаваторах, прелназначснпое для зашиты стре.1ы (головных б.юков) от улара рукоятью, включает к себя связанный с ва:1ом подъемной лебедки ко-мандоаппарат, размыкаю ше контакты которого включены между командоконтроллером подъема и электроприводом подъемной лебедки 1. Однако это устройство, отключая сигнал задания от электронривода подъемной лебедки при уменьшении длины подъемного каната меньше заданного значения, зашишает головные блоки от удара ковшом, но не нредохраняет гусеницы и ходовую тележку от ударов ковшом при выполнении операции копания, что приводит к преждевременному разрушению гусениц и ходовой тележки и снижает надежность всего ходового механизма в целом. Наиболее близким к изобретению яв.Шетея устройство управления экскаватором типа «прямая лопата, содержащее электропривод подъемной лебедки с системой управления, соединенной с командоконтроллером подъема, датчик угла наклона рукояти, датчик положения поворотной платформы и систему управления тормозами привода подъема 2. Известное устройство функционирует сле.яуюшим Ъбразом. Опасность удара ковшом по гусеничным тележкам возникает при забрасывании рукояти перед началом процесса копания при определенных вылете рукояти и положении поворотной платформы относительно ходовой тележки, при которых плоскость стрела - рукоять находится в определенных зонах. Нахождение рукояти в :тих зонах фиксируется с помощью концевого выключателя, закрепленного в нижней части поворотной платформы. При отсутствии контакта концевого выключателя с направляющими линейками никаких ограничений на управление машинистом приводами копающих механизмов не накладывается. При взаимодействии концевого выключателя с направляющими линейками размыкается цепь задания привода поворота, а привод подъема может быть включен только на подъем рукояти. Однако система управления является разомкнутой по перемещению в периоды торможения и при активном статическом моменте (негоризонтальная установка экскаватора) возможен удар о ходовую тележку. Момент отключения поворотной платформы определяется только взаимодействием концевого выключателя и направляющей линейки и не зависит от скорости привода поворота. Поэтому путь торможения должен рассчитываться на максимальную скорость привода поворота, что сужает управляемость экскаваторо.м. Кроме того, наличие числа контактов снижает надежность всего экскаватора в целом и не оправдано уменьшается рабочая зона движения ковша. Цель изобретения - повышение производительности экскаватора путем увеличения надежности механического оборудования и расширения рабочей зоны движения ковша. Указанная цель достигается тем, что устройство для управления экскаватором типа «прямая лопата с поворотной платформой и нижней рамой, содержащее электропривод подъемной лебедки с блоком управления, соединенным с командоконтроллером подъема, датчик угла наклона рукояти, датчик положения поворотной платформы и блок управления тормозами привода подъема, снабжено нелинейным преобразователем, узлом определения направления вращения рукояти, первым и вторым ключевыми элементами, первым и вторым сумматорами, первым и вторым пороговыми элементами, дифференцирующим звеном, задатчиком тормозного пути, элементом И, однополярным усилителем и регулятором положения рукояти, выход датчика угла наклона рукояти подключен непосредственно к первым входам первого и второго сумматоров, элемента И и регулятора положения рукояти, и через дифференцирующее звено - к второму входу регулятора положения рукояти и через узел определения направления вращения рукояти и первый пороговый элемент - к второму входу элемента И, датчик положения поворотной платформы через нелинейный элемент подключен к второму входу первого сумматора и третьему входу регулятора положения рукояти, выход задатчика тормозного пути подключен к четвертому входу регулятора положения рукояти и к второму входу второго сумматора, выход которого через второй пороговый элемент подключен к входу блока управления тормозами привода подъема, выход регулятора положения рукояти подключен к входу первого ключевого элемента, к управляющему входу которого подключен выход первого сумматора, выход первого ключевого элемента подключен к одному входу однополярного усилителя, к другому входу которого подключен выход командоконтроллера подъема, выход однополярного усилителя подключен к блоку управления электроприводом подъемной лебедки через второй ключевой элемент, к управляющему входу которого подключен выход элемента И. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - нижняя рама экскаватора, вид сверху; на фиг. 3 - характеристика «вход-выход нелинейного преобразователя. Схема предлагаемого устройства включает командоконтроллер подъема 1, систему управления электроприводом подъемной лебедки 2, электропривод подъемной лебедки 3, датчик положения поворотной платформы 4, нелинейный преобразователь 5, регулятор положения рукояти 6, датчик угла рукояти 7. задатчик тормозного пути 8, дифференцирующее звено 9, первый ключевой элемент 10, однополярный усилитель 11, первый сумматор 12, второй ключевой элемент 13, элемент 14 И, первый пороговый элемент -15, узел определения направления вращения рукояти 16, система управления тормозами подъема 17, второй пороговый элемент 18, второй сумматор 19, продольно-поперечные оси 20, диагональные оси 21. На фиг. 3 по оси абсцисс откладывается угол положения поворотной платформы относительно нижней рамы, по оси ординат отложен пороговый угол наклона рукояти. В устройстве для управления экскаватором командоконтроллер подъема 1 через систему управления 2 управляет скоростью электропривода подъемной лебедки 3. Датчик положения поворотной платформы 4 относительно нижней рамы через нелинейный элемент 5 связан с первым из входов регулятора положения рукояти 6, второй и третий входы которого соединены соответственно с датчиком угла наклона рукояти 7 и с задатчиком тормозного пути 8, а четвертый вход с выходом дифференцирующего звена 9 Вход дифференцирующего звена 9 связан с выходом датчика угла наклона рукояти 7. Выход регулятора положения рукояти 6 через первый ключевой элемент 10 связан с одним из входов однополярного усилителя 11, вторым входом соединенного с командоконтроллером 1. Управляющий вход первого ключевого элементп 10 питается с выхода первого сумматора 12, входами связанного с нелинейными преобразователем 5 и датчиком угла наклона рукояти 7. Выход однополярного усилителя 11 через второй ключевой элемент 13 подключен к системе управления электроприводом подъемной лебедки 2; Управляющий вход второго ключевого элемента 13 связан с выходом элемента И 14, входы которого подключены через первый пороговый элемент 15 н узел определения направления вращения рукояти 16, связаны с выходом датчика угла наклона рукояти 7. Система управления тормозами подъема 17 управляется от второго порогового элемента 18, входы которого подключены к командоконтроллеру I и выходу второго сумматора 19. Выходы сумматора 19 соединены с выходом датчика угла наклона рукояти 7 и выходом задатчика тормозного пути 8. Устройство для управления экскаватором функционирует следующим образом. Опасность удара ковшом по гусеничным тележкам и нижней раме экскаватора возникает при движении ковща в определенных зонах. Подход ковща к этим зонам характеризуется конкретными зн;1чениями таких траекторных параметров, как угол наклона и вылет рукояти и положение поворотной платформы относительно нижней рамы. Положение поворотной платформы относительно нижней рамы (фиг. 2) определяется с помощью датчика положения поворотной платформы 4 (фиг. 1). Привязка поворотной платформы экскаватора производится к продольной и поперечной осям 20 и диагональным осям 21 нижней рамы (фи.г. 2). Такая привязка осуществляется с целью формирования задания на привод подъема 30 (фиг. 1) в зависимости от расстояний рабочего органа до внещних габаритов нижней рамы и гусеничных тележек по этим осям. Формирование закона управления приводом подъема при входе ковща в зону, в которой возможен удар ковщом по гусеничной тележке, осуществляется в регуляторе положения 6 (фиг. 1). На вход регулятора 6 подается постоянный сигнал с датчика тормозного пути 8, который сравнивается на входе регулятора 6 с сигналом, пропорциональным текуц|ему углу лаклона рукояти, определенному с помощью датчика 7. Сигнал с задатчика тормозного пути 8 корректируется в зависимости от скорости изменения угла наклона рукояти и положения поворотной платформы относительно нижней рамы. Скорость изменения угла наклона рукояти заводится на вход регулятора б с выхода дифференцирующего звена 9, а через нелинейный преобразователь 5, имеющий характеристику, приведенную на фиг. 3 (применительно к экскаватору ЭКГ-20), вводится сигнал, характеризующий положение поворотной платформы относительно нижней рамы. Необходимость этого сигнала обусловлена изменением фасстояния от напорной оси до нижней рамы при повороте экскаватора. Именно этим расстоянием и определяется вид нелинейности, реализуемой нелинейным звеном 5. Сигнал, поступающий на вход регулятора 6 с выхода дифференцирующего звена 9, смещает точку начала торможения в зависимости от скорости изменения угла.наклона рукояти, так что при больщей скорости опускания рукояти ее торможение начинается раньще. Для подключения выхода регулятора 6 к входу системы управления 2 приводом подъема необходимо выполнение двух условий. Первое условие заключается в том, что сигнал с выхода датчика угла наклона рукояти 7 должен быть больше сигнала на выходе нелинейного преобразователя 5. Сравнение этих сигналом осуществляется на первом сумматоре 12, который управляет работой первого ключевого элемента 10. Таким образом, первый ключевой элемент 10 замыкается при приближении ковша к нижней раме на допустимое расстояние, характеризуемое с помощью нелинейного звена 5.
Вторым условием является наличие сигнала на выходе логического элемента И 14, на входы которого подаются выходные напряжения с датчика угла наклона рукояти 7 и с первого порогового элемента 15. На выходе первого порогового элемента 15 появляется выходной сигнал при приближении рукояти к нижней раме на расстояние, несколько превышающее путь торможения рукояти. Сигнал на выходе узла определения направления вращения рукояти 16 имеется только при опускании рукояти.
Таким образом, второй ключевой элемент 13 замыкается только при опускании рукояти и приближении ее к нижней раме на расстояние, заданное на первом пороговом элементе , 15.
Однополярный усилитель 11 служит для компенсации величины сигнала с выхода кома ндоконтроллера подъема 1, поступающего на вход системы управления приводом подъема. 2..
Осуществляется это следующим образом. Суммарный сигнал на выходе систе.мы управления 2 равен (UnK + UycM ). где UKK , иусил - напряжение на выходе кома ндроконтроллера 1 и однополярного усилителя И, соответственно.
Напряжение iia выходе Н однополярного усилителя равно
Uycmi О при и иусил (Uper-UKK) при ,
где Uper - напряжение на выходе регулятора положения 6.
Таким образом, напряжение на входе системы управления в последнем случае равно
+ UKK (Uper -UKK ) + UKK - Uper
и
усил
Для исключения удара ковша по нижней раме и ходовым тележкам в случае нарушения по какой-либо причине работы элементов или цепей устройства в схеме предусмотрена блокировка, обеспечивающая наложение механических тормозов на подъемную лебедку при приближении ковша на минимально допустимое расстояние.
Эта блокировка реализована следующим образом. На входе второго сумматора 19 сопоставляются сигналы, пропорциональные текущему углу наклона рукояти и за.аанному пути торможения. При недопустимом превышении текущего угла над заданным путем торможения перебрасывается второй пороговый элемент 18 и сигнал с его выхода поступает на систему управления тормозами 17 подъемной лебедки.
Растормаживание этой лебедки происходит при перемещении командоконтроллера подъема в положение «На подъем, что обеспечивается подключением второго входа порогового элемента 18 к командоконтроллеру 1.
Регулятор положения представляет собой четырехвходовой сумматор и его целесообразно реализовать пропорциональным также на основе операционного усилителя.
Как показали исследования, проведенные в НИИтяжмаше ПО «Уралмаш, использование предлагаемого устройства позволит повысить интегральную производительность экскаватора ЭКГ-20 на 2-3% за счет повышения надежности ходового оборудования и расширения рабочей зоны движения ковша.
-О
/5
1 г ,
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления экскаватором типа прямая лопата | 1982 |
|
SU1082915A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1984 |
|
SU1232758A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
| Устройство для управления копающими механизмами экскаватора | 1982 |
|
SU1082916A1 |
| Устройство для управления процессом компания одноковшового экскаватора | 1976 |
|
SU617546A1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1273450A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭКСКАВАТОРОМ ТИПА «ПРЯМАЯ ЛОПАТА с поворотной платформой и нижней рамой, содержащее электропривод подъемной лебедки с блоком управления, соединенным с командоконтроллером подъема, датчик угла наклона рукояти, датчик положения поворотной платформы и блок управления тормозами привода подъема, отличающееся ,тем, что, с целью повышения производительности экскаватора путем увеличения надежности механического оборудования и расширения рабочей зоны движения ковша, оно снабжено нелиненым преобразователем, узлом определения направления вращения рукояти, первым и вторым ключевыми элементами, первым и вторым сумматорами, первым и вторым пороговы ми элементами, дифференцирующим звеном, задатчиком тормозного пути, элементом И, однополярным усилителем и регулятором положения рукояти, выход датчика угла наклона рукояти подключен непосредственно к первым входам первого и второго сумматоров, элемента И и регулятора положения рукояти, и через дифференцирующее звено к второму входу регулятора положения рукояти и через узел определения направления вращения рукояти и первый пороговый элемент - к второму входу элемента И, датчик положения поворотной Г1латформы через нелинейный элемент подключен к второму входу первого сумматора и третьему I входу регулятора положения рукояти, выход задатчика тормозного пути подключен к (Л четвертому входу регулятора положения рукояти и к второму входу второго сумматора, выход которого через второй пороговый элемент подключен к входу блока управления тормозами привода подъема, выход регулятора положения рукояти подключен к входу первого ключевого элемента, к управляющему входу которого подключен выход первого сумматора, выход первого клюсо чевого-.элемента подключен к одному входу 4 однополярного усилителя, к другому входу которого подключен выход командоконтролСО лера подъема, выход однополярного усилителя подключен к блоку управления электроприводом подъемной лебедки через второй ключевой элемент, к управляющему вхо.цу которого подключен выход элемента И.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вуль Ю | |||
| Я | |||
| и др | |||
| Одноковшовые экскаваторы НКМЗ | |||
| М., «Недра, 1978, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3507778/03, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
