намических составляющих управляющего воздействия включает функциональный преобразователь коэффициента передачи и аналоговый сумматор, выход которого соединен с соответствующим входом функционального преобразователя коэффициента передачи.
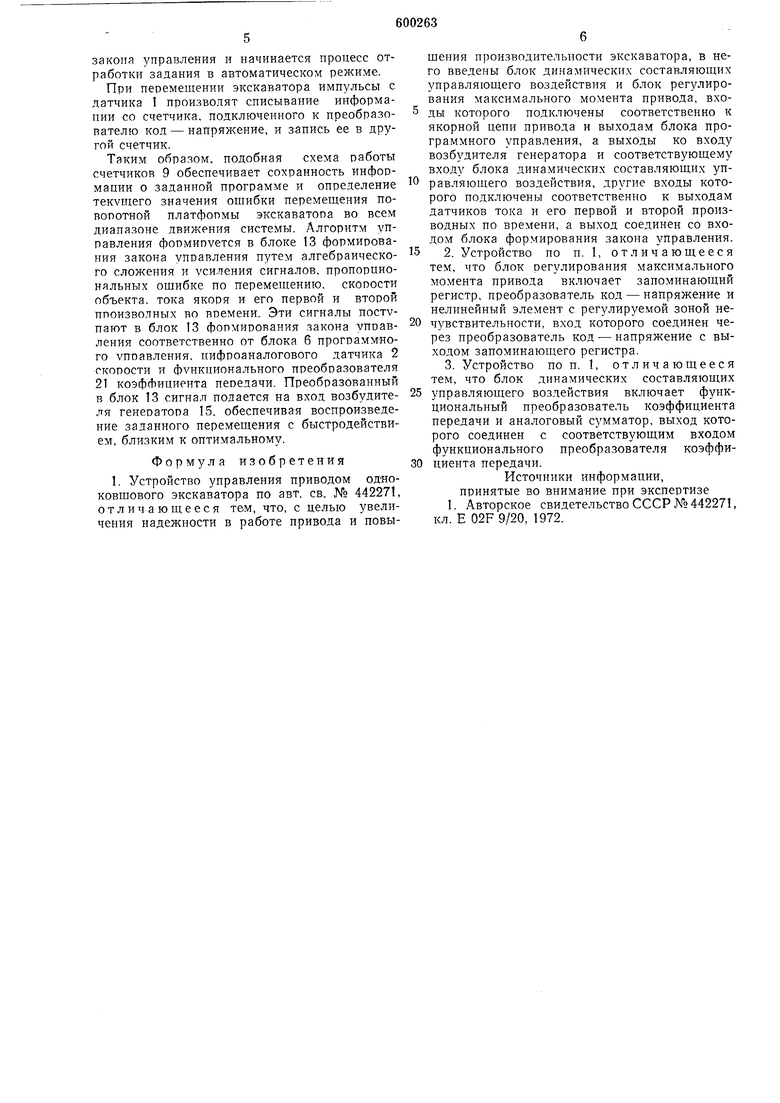
На фиг. 1 представлена блок-схема описываемого устройства; на фиг. 2 - характеристика вход - выход нелинейного элемента с регулируемой зоной нечувствительности; на фиг. 3 - график суммарного значения максимальных моментов двигателей от величины перемещения при оптимальном коэффициенте тепловой загрузки.
Устройство управления приводом одноковшового экскаватора содержит импульсный датчик 1 величины и направления перемещения, цифроаналоговый датчик 2 скорости, датчик 3 тока и датчик 4 первой производной тока по времени, датчик 5 второй производной тока по времени, блок 6 программного управления, состоящий из узла 7 программного управления, триггера 8, двух реверсивных счетчиков 9, узла 10 задания направления перемещения, триггера И и преобразователя код - напряжение 12, блок 13 формирования закона управления, блок 14 динамических составляющих управляющего воздействия, возбудитель генератора 15, блок 16 регулирования максимального момента привода, состоящий из запоминающего регистра 17, преобразователя код - напряжение 18 и нелинейного элемента 19 с регулируемой зоной нечувствительности. Блок динамических составляющих управляющего воздействия включает аналоговый сумматор 20, к выходу которого подключен функциональный преобразователь 21 коэффициента передачи.
Работает устройство следующим образом.
Первоначальный ввод задания осуществляется оператором путем перемещения поворотной платформы экскаватора на необходимый угол при ручном управлении и подаче в один из реверсивных счетчиков 9 через узел 7 сигнала программного смещения. При перемещении платформы импульсный датчик величины и направления перемещения выдает импульсы, количество которых пропорционально величине перемещения. К выходам датчика 1 подключены счетные входы двух идентичных реверсивных счетчиков 9. В зависимости от направления перемещения один из счетчиков работает в режиме сложения (запись), а другой-вычитания (списывание). Синхронную коммутацию счетчиков 9 на запись или списывание производит триггер 8 в зависимости от знака скорости поворотной платформы экскаватора. В счетчике 9, к которому подключена шина запись, происходит счет и запоминание количества импульсов, поступающих от импульсного датчика 1, и алгебраическое суммирование их с сигналом программного смещения. Из счетчиков 9 информация о величине перемещения поступает в запоминающий регистр 17. В запоминающем регистре 17
хранится полная информация о величине перемещения в данном цикле, записанная в любой из счетчиков 9 или переписываемая из одного счетчика 9 в другой в процессе движения
объекта. С выхода запоминающего регистра 17 эта информация поступает в преобразователь код - напряжение 18 и функциональный преобразователь 21 коэффициента передачи. В преобразователе код - напряжение 18 информация о полной величине перемещения преобразуется из цифровой формы в аналоговую и затем поступает на вход нелинейного элемента 19 с регулируемой зоной нечувствительности, характеристика вход - выход которого представлена на фиг. 2. Ширина зоны нечувствительности характеристики нелинейного элемента 19 прямо пропорциональна величине перемещения. Пелинейный элемент 19 включен в день обратной связи по току якоря
системы Г-Д, поэтому величина максимального тока якоря (момента двигателей) прямо пропорциональна ширине его зоны нечувствительности. Следовательно, при функционировании блока 16 регулирования максимального
момента привода значение максимального момента, в зависимости от величины перемещения, изменяется по закону, показанному на фиг. 3,
где Л - - суммарный момент двигате,
лей в относительных единицах;
Ммаис. - максимальное значение момента, развиваемого двигатслями;
Мн - номинальный момент двигателей;
ф - перемещение;
фрасч. - расчетная величина перемещения.
Устройство, реализующее такой закон, изменения момента от величины перемещения, позволяет поддерживать коэффициент тепловой загрузки двигателей на оптимальном уровне. Следовательно, перед началом движения объекта в автоматическом режиме в устройстве управления приводом поворота однокоБЩОвого экскаватора происходит ввод и запоминание программы циклических перемещений, выбор величины максимального момента привода и коэффициента передачи по каналу суммарного сигнала от датчиков тока и его производных в функции заданного перемещения. На этом процесс ввода программы заканчивается. По команде оператора на перемещение в автоматическом режиме в заданную сторону узел 10 задания направления перемещения производит установку соответствующего счетчика 9 в исходное состояние и подключает преобразователь код - напряжение 12 к другому счетчику 9, с которого списывается информация. После подключения счетчика 9 к преобразователю код - напряжение 12 с последнего подается сигнал о величине перемещения в блок 13 формирования
закона управления и начинается процесс отработки задания в автоматическом .
При перемещении экскаватора импульсы с датчика 1 производят списывание информации со счетчика, подключенного к преобразователю код - напряжение, и запись ее в другой счетчик.
Таким образом, подобная схема работы счетчиков 9 обеспечивает сохранность информации о заданной программе и определение текущего значения ошибки перемещения ПОВОРОТНОЙ платформы экскаватора во всем диапазоне движения системы. Алгоритм управления формируется в блоке 13 формирования закона управления путем алгебраического сложения и усиления сигналов, пропорциональных ошибке по перемешению, СКОРОСТИ объекта, тока якоря и его первой и второй ПРОИЗВОДНЫХ во времени. Эти сигналы поступают в блок 13 формирования закона управления соответственно от блока 6 программного управления, пифроаналогового датчика 2 СКОРОСТИ и функционального преобразователя 21 коэффициента передачи. Преобразованный в блок 13 сигнал подается на вход возбудителя генератора 15, обеспечивая воспроизведение заданного перемещения с быстродействием, близким к оптимальному.
Формула изобретения
1. Устройство управления приводом одноковшового экскаватора по авт. св. № 442271, отличающееся тем, что, с целью увеличения надежности в работе привода и повышения производительности экскаватора, в него введены блок динамических составляющих управляющего воздействия и блок регулирования максимального момента привода, входы которого подключены соответственно к якорной цени привода и выходам блока программного управления, а выходы ко входу возбудителя генератора и соответствующему входу блока динамических составляюших управляющего воздействия, другие входы которого подключены соответственно к выходам датчиков тока и его первой и второй производных по времени, а выход соединен со входом блока формирования закона управления.
2. Устройство по ц. 1, отличающееся тем, что блок регулирования максима,1ьного момента привода включает запоминающий регистр, преобразователь код - напряжение и нелинейный элемент с рег мтируемой зоной нечувствительности, вход которого соединен через преобразователь код - напряжение с выходом запоминающего регистра.
3. Устройство по ц. 1, отличающееся тем, что блок динамических составляющих
управляющего воздействия включает функциональный преобразователь коэффициента передачи и аналоговый сумматор, выход которого соединен с соответствующим входом функционального преобразователя коэффициента передачи.
Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР ЛЬ 442271, кл. Е 02F 9/20, 1972.
r F-Q)%
i J
л i /i Й
jr
,
ZC
%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом одноковшового экскаватора | 1972 |
|
SU442271A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Устройство для решения дифференциальных уравнений в частных производных | 1979 |
|
SU781840A1 |
| Устройствоуправления приводом поворота одноковшового экскаватора | 1975 |
|
SU590409A2 |
| Калибратор переменного напряжения | 1983 |
|
SU1115031A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366998C2 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |

расч.
