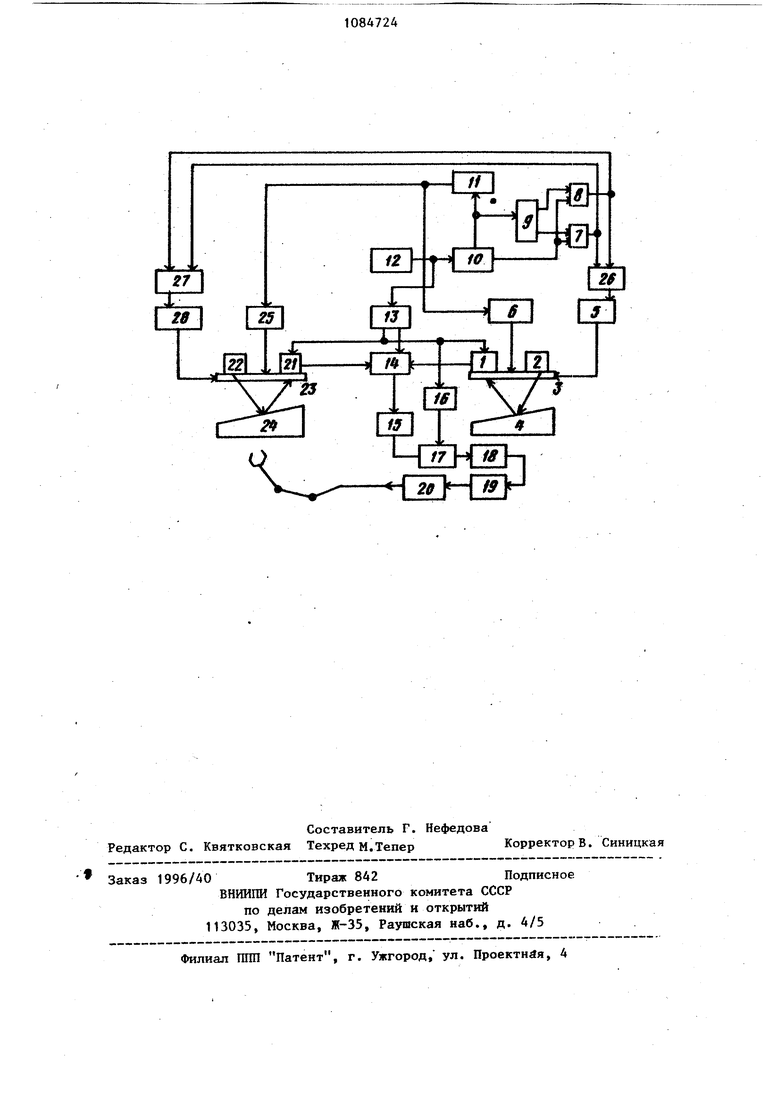
Изобретение относится к робототехнике и может быть использовано при создании очувствленных роботов. Известно устройство для управления очувствленным роботом, содержащее телевизионные камеры, блоки преобразования и управления lj . Указанное устройство является сложным. Наиболее близким к предлагаемому является устройство, содержащее установленные на первой каретке первые источник и приемник излучения, после довательно соединенные генератор импульсов, первый двоичный умножитель триггер, первый элемент И, первый элемент ИЛИ и первый привод, связан ный с первой кареткой, второй выход триггера подключен к первому входу второго элемента И, выход которого соединен с вторым входом первого эле мента ИЛИ, а второй вход - с вторым входом первого .элемента И и вторым вькодом первого двоичного умножителя, подключенного первым выходом через второй двоичный умножитель к входу второго привода, связанного с первой кареткой, а выход генератора импульсов через формирователь импульса соединен с входом первого при емника излучения 2J . Известное устройство не позволяе производить разработку деталей по эталонной модели, что сужает его функциональные возможности. Цель изобретения - расширение функциональных возможностей устройст ва. Указанная цель достигается тем, что в устройство, содержащее установленные на первой каретке первые источник и приемник излучения, последовательно соединенные генератор импульсов, первый двоичный умножитель, триггер, первый элемент И, первый элемент ИЛИ и первый привод, связанный с первой кареткой, второй выход триггера подключен к первому входу второго элемента И, выход кото рого соединен с вторым входом первого элемента ИЛИ, а второй вход - с вторым входом первого элемента И и вторым выходом первого двоичного умножителя, подключенного первым выходом через второй двоичный умножитель к входу второго привода, связан ного с первой кареткой, а выход гене ратора импульсов через формирователь iимпульса соединен с входом первого 242 приемника излучения, введены установленные на второй каретке вторые источник и приемник излучения, одно-. вибратор, третий привод, последовательно соединенные второй элемент ИЛИ и четвертый привод, а также последовательно включенные блок сравнения, нуль-орган и третий элемент И, выход которого соединен с выходом устройства, а второй вход через одновибратор - с выходом формирователя импульса и входом второго приемника излучения, подключенного выходом к первому входу блока сравнения, второй вход которого соединен с выходом первого приемника излучения, выходы первого и второго элементов И подключены к соответствующим входам второго элемента ИЛИ, выход второго двоично о умножителя соединен с входом треть его привода, связанного с второй кареткой, связанной акже с четвертым приводом. На чертеже представлена функциональная схема предлагаемого устройства. Устройство для управления очувствленным роботом содержит первый приемник 1 излучения, первый источник 2 излучения, первую каретку 3, эталонную деталь 4, первый и второй приводы 5 и 6 соответственно, первый и второй элементы И 7 и 8 соответственно, триггер 9, первый и второй двоичные умножители 10 и 11 соответственно, генератор 12 импульсов, формирователь 13 импульса, блок 14 сравнения, нуль-орган 15, одновибратор 16, третий элемент И 17, блок 18 управления сортировкой, блок 1 управления роботом, блок 20 приводов, второй приемник 21 излучения, второй источник 22 излучения, вторз о каретку 23, контролируемую деталь 24, третий привод 25, первый и второй элементы ИЛИ 26 и 27 cooTBeTCTBeHHOjt четвертый привод 28. Устройство работает следующим образом. При работе рука робота по программе производит съем изготовленной детали 24 со станка и устанавливает ее в гнездо контрольного с.тола. Над контрольным столом по координатам X и У перемещается на одной и той же высоте относительно поверхности контрольного стола подвижная каретка 23, на которой установлен чувствительный элемент, включакнций
в себя коллимированный источник 22 излучения и его приемник 21 . Излучение источника 22 излучения направлено на поверхность детали 24. Контроль размеров изготовленной детали 24 осуществляется в устройстве путем сравнения ее размеров с размерами эталонной детали 4. С этой целью в. гнездо второго контрольного стола, над которым осуществляет сканирующие движения подвижная каретка 3, устанавливается эталонная деталь 4. На каретке 3 размещен чувствительный элемент с источником 2 излучения и его приемником 1. Параметры источника 2 излучения и приемника 1 идентичны параметрам источника 22 излучения и приемника 21. Обе каретки : 3 и 23 с установленн1з1ми на них. чувствительными элементами синхронно перемещаются с помощью двух приводов 6 и 25 вертикального перемещения кареток 3 и 23 и приводов 5 и 28 горизонтального перемещения. В исходном положении положения кареток 3 и 23 и положения деталей 4 и 24 относительно контрольных столов одинаковы. Триггер 9 находится в таком устойчивом состоянии, которое разрешает прохождение импульсов с выхода первого двоичного умножителя 10 через один из элементов И 7 и 8, напри мер 7, на выходы приводов 5 и 28, которые перемещают соответственно каретки 3 и 23 из исходного положения вдоль оси X слева направо. После довательность импульсов для управления приводами 5 и 28 формируется на выходе двоичного умножителя 10 при поступлении на его вход импуль0847244
сов с выхода генератора 12 импульсов. При поступлении импульса генератора 12 на двоичный умножитель 10 приводы 5 и 28 перемещаются на один 5 шаг.и останавливаются. Одновременно пульс с генератора 12 импульсов поступает на вход формирователя 13, который формирует импульс определенной длительности, который подается
10 на управляемые входы приемников
1 и 21. Одновибратором 16 формируется короткий.импульс, который подается на блок 14 сравнения в момент окончания действия импульса, снимае15 мого с выхода формирователя 13 и управляющего работой приемников 1 и 21. За время действия управляющего импульса приемники 1 и 21 измеряют отраженное от поверхности деталей 4
20 и 24 излучение в точке остановки подвижных кареток 3 и 23. В момент действия короткого импульса на блоке 14 производится сравнение сигналов приемников. При наличии брака детали
25 24 сигнал на выходе нуль-органа 15 нулевой. Поэтому на выходе элемента И 17 также нулевой сигнал, что указывает на несоответствие деталей 24 и 4 (сигнал Брак). Если же деталь 24
30 соответствует детали 4, то на выходе элемента И 17 единичный сигнал (сигнал Годен). Указанные сигналы соответствующим образом отрабатываются роботом: деталь 24 переносится либо
35 в тару с годными деталями, либо в тару с браком.
Применение изобретения,позволит за счет автоматизации процесса иден|Тифиюации деталей расширить функцио нальные возможности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления очувственным роботом | 1982 |
|
SU1068887A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1433791A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления очувствленным роботом | 1980 |
|
SU954921A1 |
| Оптико-электронное устройство для измерения линейных и угловых перемещений | 1985 |
|
SU1265476A1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА РАБОЧИХ ХОДОВ ПРЕССА | 2014 |
|
RU2538313C1 |
| Устройство для формирования сигнала управления промышленным роботом | 1977 |
|
SU683900A1 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1839228A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАДИОСТАНЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1991 |
|
RU2010436C1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОЧУВСТВЛЕННШ РОБОТОМ, содержащее установленные на первой каретке первые источник и приемник излучения, последовательно соединенные генератор импульсов, первый двоичный умножитель, триггер, первый элемент И, первый элемент ИЛИ и первый привод, связанный с первой кареткой, второй выход триггера подключен к первому входу второго элемента И, выход которого соединен с вторым входом первого элемента ИЛИ, а второй вход - с вторым входом первого элемента И и вторым выходом первого двоичного умножителя, подключенного первым выходом через второй двоичный умножитель к входу второго привода, связанного с первой кареткой, а выход генератора импульсов через формирователь импульса соединен с входом первого приемника излучения, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены установленные на второй каретке вторые источник и приемник излучения, одновибратор, третий привод, последовательно соединенные второй элемент ИЛИ и четвертый привод, а (Л также последовательно включенные блок сравнения, нуль-орган и третий элемент И, выход которого соединен с выходом устройства, а второй вход через одновибратор - с выходом формирователя импульсов и входом второ го приемника излучения, подключенного выходом к первому входу блока о .сравнения, второй вход которого сое(X) . динен с первого приемника 4i излучения, выходы первого и второго элементов И подключены к соответст-: vl вующим входам второго элемента ИЛИ, О выход второго двоичного умножителя соединен с входом третьего привода, связанного с второй кареткой, связанной также с четвертым приводом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов и манипуляторов | |||
| М., Машиностроение, 1977, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 3228184/18-24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
