Изобретение относится к автоматике и может быть использовано в системах управления силовыми установками. Известны системы управления параллельно работающими на общую нагрузку силовыми установками. Принцип их работы основан на контроле угловой скорости вращения отдельной силовой установки посредством своег для данной установки регулятора ско рости ll. К недостаткам устройства следует х)тнейти автономность управления отдельными силовыми установками, что увеличивает энергоемкость процесса управления; Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовател но соединенные регулятор, первый блок сумматоров, блок исполнительных механизмов, блок силовых установок, блок тахометров, второй блок сумматоров и блок регуляторов, второй выход блока силовых установок соединен с первым входом сети, первья4 выходом соединенной через датчи частоты с первым входом сумматора, вторым входом подклйченного к выходу первого задатчика, второй выход сети через датчик активной мощности соединен с первым входом второго сумматора, вторым входом подключенного к выходу второго задатчика 2J Недостатком этого устройства является независимость работы одной силовой установки от работы других параллельно работающих силовых уста новок, что приводит к уменьшению моторесурсов и увеличению энергоемкости процесса управления. Это объясняется тем, что вследствие жестко связи отдельными силовыми установка ми через обтую нагрузку угловая ско рость вращения всех силовых установок принудительно устанавливается одной и той же, отличной от требуемой, т.е. система управления оказы вается статической независимр от типа регулятора, используемого для управления отдельными двигателями. При этом нагрузка между отдельными силовыми установками распределена неравномерно, что ведет к снижению качества регулирования и увеличению энергоемкости процесса управления. 33.2 Цель изобретения - увеличение моторесурсов, повьшенне точности и КПД и снижение знергоемкости процес-са управления. Поставленная цель достигается тем, что в систему, содержащую последовательно соединенные регулятор, первый блок сумматоров, блок исполнительных механизмов, блок силовых установок, блок тахометров, второй блок сумматоров и блок регуляторов, второй выход блока силовых установок соединен с первым входом сети, первым выходом соединенной через датчик частоты сети с первым входом nepjBoro сум;матора, вторым входом подключенного к выходу первого задатчика, второй выход сети через датчик активной мощности соединен с первым входом второго сумматора. вторым входом подключенного к выходу второго задатчика, введены умножитель и блок ограничителей, выход блока регуляторов через блок ограничителей соединен с вторым входом первого блока су1иматоров, выход второго сумматора через умножитель соединен с входом регулятора, второй вход умножителя соединен с выходом первого сумматора. На чертеже изображена функциональная блок-схема системы. Система содержит вторюй и первый блоки 1 и 2 сумматоров, блок 3 регуляторов, блок 4 ограничителей, блок 5 исполнительных механизмов, блок 6 силовых установок, датчнзс 7 частоты сети, датчик 8 активной мощности сети, задатчики 9 и tO, первый и второй сумматоры П и 12, умножитель 13, регулятор 14, сеть 15, блок 16 тахометров . Под символом обозначается связь между блоками А и В, где элемент (ч 1,.. .,п) соединен с одним и только одним элементом b В. Система работает след /ющим образом. В каждом из сумматоров 2 ,{(« 1,...,П) блока 2 из сигналов, поступающих с ограничителя 4 блока 4 и второго регулятора 14, формирует- ся сигнал, идущий через исполнительный механизм блока 5 на вход силовой установки 6 блока 6. Сумматором Ij блока 1 формируется сигнал рассогласования между сигналам, определяющим фактическое значение угловой скоjiOCTH силовой установки 6 , получа-,ehibiM с тахометра силовой установки 16J , и входным сигналом системы, задающим требуемое для всей системы одно и тоже значение угловой скорости. Этот сигнал поступает на вход регулятора 3 блока 3, реализукнцего линейный астатический закон управления. Вьссодной сигнал с регулятора 3J поступает на вход ограничителя 4j блока 4, где ограничивается по амплитуде (зона линейности
.уменьшается до 20-30%). .
Сумматором 11 формируется сигнал рассогласования между сигналом с подключенного к общей сети 15 датчика 7 .частоты сети и сигналом с задатчика 9, определяюсцим требуемое для общей сети значение частоты. Сумматором 12 формируется сумма сигнала подключенного к общей сети датчика 8 активной мощности,и сигнала с задатчика 10 такого, что выходной сигнал сумматора 12 всегда был больше некоторого значения . Сигна1лы с сумматоров 11 и 12 поступают
на вход умножителя 13, из выходного сигнала которого формируется с по14ОЩЫО второго регулятора 14 ПИД-закон управления, линейный относитель но сигнала с 5 ножителя 13 и с перестраиваемым общим коэффициентом усиления, роль которого играет сигнал с сумматора 12.
Основная роль в упраЕ1лении силовыми установками отводится дополнительному контуру, управления, где используется регулятор, общ для ;
всех силовых установок. Система управления параллельно работаюарши силовыми установками становится астатической и в ней происходит равномерное распределение нагрузки мезкду
силовыми установками. Тем сабеям исключаются колебания мощности в значительных пределах, отдаваемой каждой силовой установкой в отдельнрс- . ти, их режимы функционирования ствновятся близкими к номинальным и, как следствие зтого, увеличиваются моторесурсы силовых ус.тановок. А . так как номинальные режиьш наиболее экономичны в смысле потребления
энергии, необходимой для функционирования всей системы в целсм4 то использование изобретения odecneMHsaet снижение энергоемкости процесса управления .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления энергетическим комплексом | 1982 |
|
SU1128220A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1157523A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1985 |
|
SU1252754A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1183939A1 |
| Адаптивная система управления судовыми силовыми установками | 1981 |
|
SU981935A1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОВАЛЬНОЙ ТУРБОГЕНЕРАТОРНОЙ УСТАНОВКОЙ СО СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ (ВАРИАНТЫ) | 2006 |
|
RU2314635C1 |
| Способ управления регулирующими клапанами паровой турбины ледокольной турбогенераторной гребной электрической установки и устройство для его осуществления | 2017 |
|
RU2680905C1 |
| Способ управления энергетическим комплексом | 2021 |
|
RU2768498C1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Система управления судовой многодвигательной установкой | 1980 |
|
SU965899A1 |
СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМИ УСТАНОВКАМИ., содержащая последовательно соединенные регулятор, первый блок сумматоров, блок исполниШ тельных механизмов, блок силовых, установок, блок тахометров, второй блок сумматоров и блок регуляторов, второй выход блока силовых установок соединен с первым входом сети, первым выходом соединенной через датчик частоты сети с первым входом первого сумматора, вторым входом подключенного к вьпсоду первого задатчика, второй выход сети через датчик активной мощности соединен с первьм входом второго сумматора, вторым входом подключенного к выходу-второго задатчика, отличающаяся тем, что, с целью повышения ее точности и КПД, она содержит умножитель и блок ограничителей, выход блока регуляторов через блок ограничителей соединен с вторым входом первого блока сумматоров, выход второго сумматора через умножитель соединен с входом регулятора второй вход умножителя соединен с выходом первого сумматора. X) 4: :о :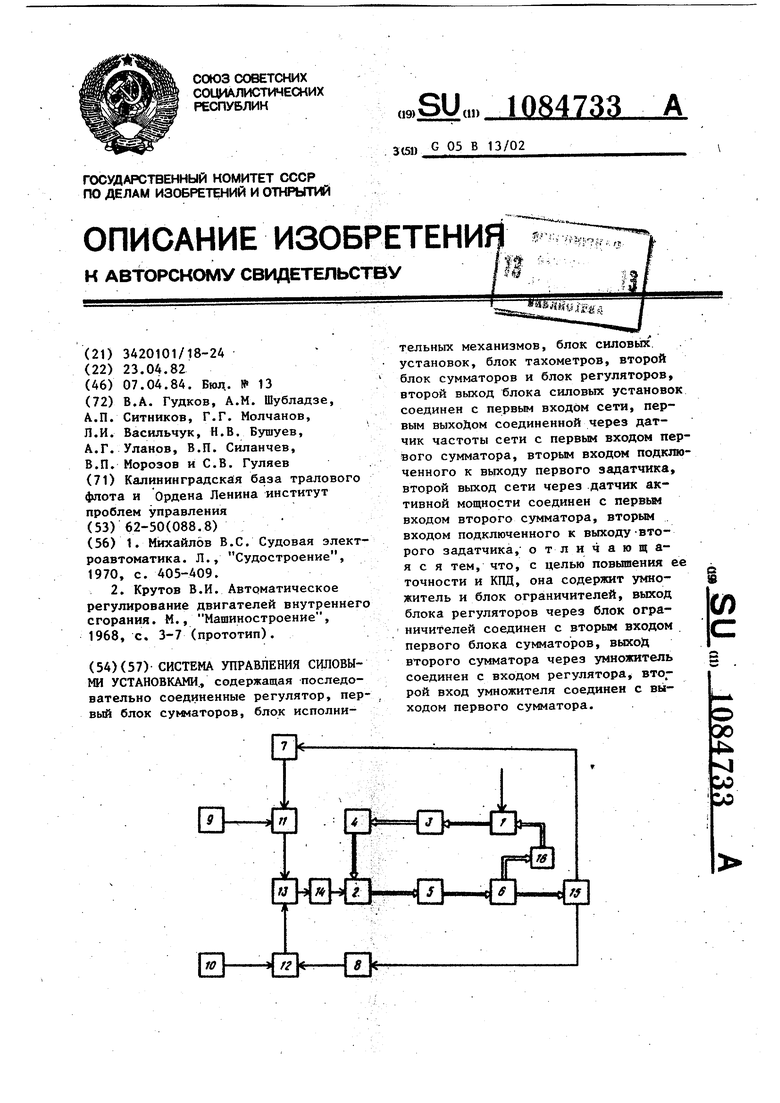
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Михайлов B.C | |||
| Судовая электроавтоматика | |||
| Л., Судостроение, 1970, с | |||
| Аппарат для передачи изображений неподвижных и движущихся предметов | 1923 |
|
SU405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Крутов В.И | |||
| Автоматическое регулирование двигателей внутреннего сгорания | |||
| М., Машиностроение, 1968, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
