1
Изобретение относится к следящим системам общего назначения,предназначенным для отслеживания медленно изменяющегося полезного Сигнала в условиях воздействия на объект регулирования гармонической помехи Переменной интенсивности, параметры которой неизвестны и не могут быть непосредственно измерены, и может найти широкое применение в машиностроении.
Известна следящая система, содержащая последовательно соединенные блок сравнения, сумматор, усилитель и исполнительный двигатель, выходно вал которого через последовательно соединенные тахбгенератор и нелинейный преобразователь соединен с вторым входом сз матора а редуктор - с одним ид входов блока сравнения, второй и третий входы нелинейного преобразователя соединены соответственно с выходами источника опорного напряжения и усилителя мощности Си.
Известна также следящая система, содержащая блок коррекции и последовательно, соединенные задатчик, сумматор, регулятор положения, регулятор скррости, регулятор тока, усилитель, двигатель, редуктор и объект регулировання, вьпсод которого подключен к второму входу сумматора, выход усилителя через датчик тока соединен с вторым входом регулятора тока, вь1ход двигателя через датчик скорости подключен к второму входу регулятора скорости, входы блока коррекции соединены с выходами pisry лятора скорости и датчика тока соответственно, выход блока коррекции - с третьим входом регулятора скорости С 2 3.
Недостатком указанных следящих систем является низкая помехозащищенность. При отработке полезного сигнала в условиях воздействия гармойической помехи переменной интенсивности в следящей системе возникает составляющая ошибки, обуслов-, ленная помехой. Эта составляющая ошибки является переменной и в данньк следян9€х системах не может быть скомпенсирована.
Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая последовательно соединенные задатчик.
30192
регулятор положения, последовательный блок коррекции, регулятор скорости, регулятор ток, усилитель мощности, исполнительный двигатель
5 и регулятор, на выходном валу которого установлен объект регулирования, подключенный выходом через датчик положения к второму входу регулятора положения, выходной
О вал исполнительного двигателя через датчик скорости подключен к второму входу регулятора скорости и входу нелинейного преобразователя, подклкиенного выходом к третъе5 му входу регулятора положения,
электрический выход исполнительного двигателя через датчик- тока подключен к второму входу регулятора тока и входу первого дифференциатора,
0 подключенного выходом к четвертому входу регулятора положения, подклю чеяного пятым входом через второй дифференциатор к выходу регулятора Тока СЗ.
5 Недостатком известной системы является ее низкая помехозащищенность.
Цель изобретения - повышение помехозащищенности следящей системы.
Q Поставленная цель достигается тем, что в следящей системе, содержащей последовательно соединенные задатчик, первый сумматор, второй сумматор, регулятор положения,регу-;
лятор скорости, регулятор тока.
усилитель мощности, исполнительный двигатель и редуктор, на вькодном которого установлен объект регуляровання, подключенный через да1ч1ик положения. к второму входу первого сумматора, выходной вал исполнительного двигателя через датчик скорости подключен к второму входу регулятора скорости и первому входу нелинейного преобразователя, подключенного выходом к второму входу второго сумматора, электрический выход исполнительного двигателя через датчик тока подключен к второму входу регулятора тока и входу дифференциатора, выходы датчика тока и дифференциатора подключены соответственно к второму и третьему входам нелинейного преобразователя.
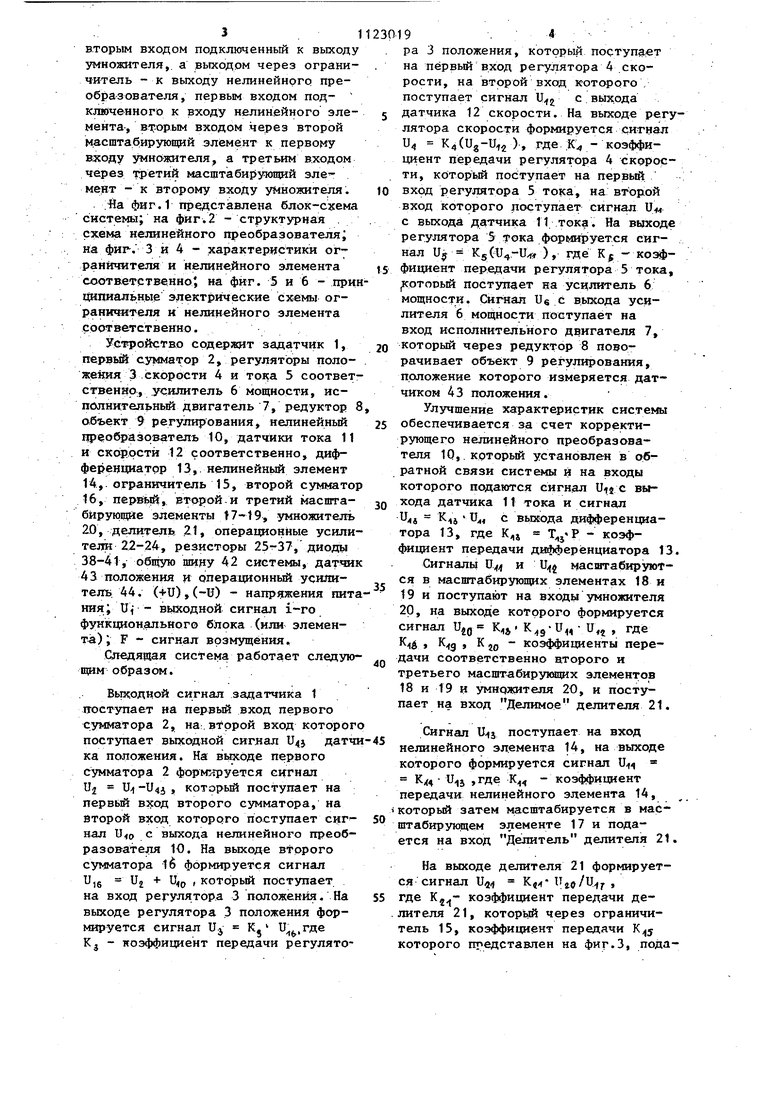
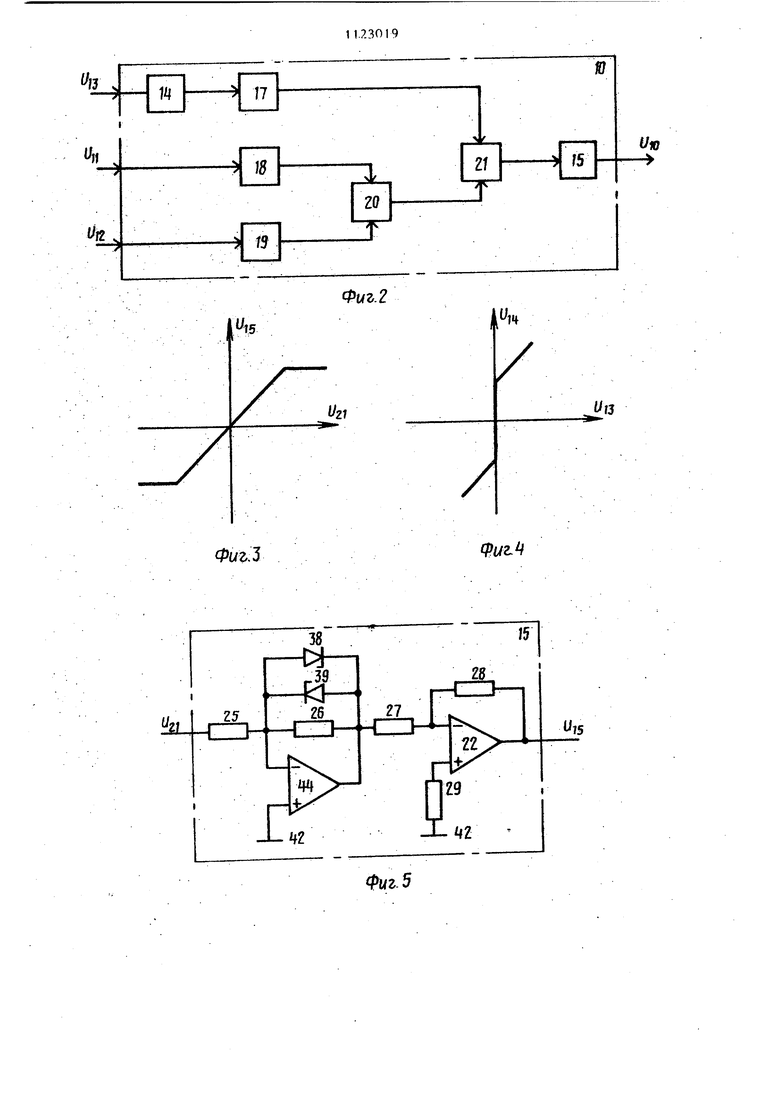
Кроме того, нелинейный преобразователь содержит последовательно соединенные нелинейный элемент, первьй масштабирующий элемент и делитель. 3 вторым входом подключенный к выходу умножителя,, а выходом через ограничитель - к выходу нелинейного преобразователя, первым входом подключенного к входу нелинейного элемента, ВТ.ОРЫМ входом через второй масштабирующий элеме;нт к первому входу умножителя, а третьим входом через третий масштабирующий зле мент - к второму входу умножителя. ;tia фиг.1 представлена блок-схема системы; на фиг.2 - структурная . схема нелинейного преобразователя; на фиг. 3 и 4 - характеристики огранйчителя и нелинейного элемента соответственноJ на фиг. 5 и 6 - при ципиальные электрические схемы ограничителя и нелинейного элемента соответственно. Устройство содержит задатчик 1, первьй сумматор 2, регуляторы положения 3 скорости 4 и тока 5 соответ ственно, усилитель 6 мощности, исполнительный двигатель 7, редуктор объект 9 регулирования, нелинейный преобразователь 10, датчики тока 11 и скорости 12 соответственно, дифференциатор 13,. нелинейный элемент 14,. ограничитель 15, второй суммато 16, первь й, второй и третий масштабирующие элементы 17-19, з ножитедъ 20, делитель .21, операционные усили тели 22-24, резисторы 25т-37, диоды 38-41, общзпо шину 42 систеки, датчи 43 положения и операционный усилитель. 44. (-HJ), (-U) - напряжения пит ния; U, - выходной сигнал i-ro функционального блока (или элемента); F - сигнал возмущения. Следящая система работает следую щим образом. Вьрсодной сигнал задатчика 1 Поступает на первый вход первого сумматора 2, на: второй вход которог поступает выходной сигвал датч ка положения. На первого сумматора 2 формз-груется сигнал Uj Щ-U4i, который поступает на первьй вход второго сумматора, на второй вход которого поступает снг нал с выхода нелинейного преобразователя 10. На выходе второго сумматора 1 формируется сигнал 16 г o который поступает на вход регулятора 3 положения. На выходе регулятора 3 положения формируется сигнал Uj Kj и;,.где Kj - коэффициент передачи регулято9 . . ра 3 положения, который поступает на первый вход регулятора 4 скорости, на второй вход которого . поступает сигнал U с.выхода датчика 12 скорости. На выходе регулятора скорости формируется сигнал и K4( ) где. К - коэффициент передачи регулятора 4 скорости, который поступает на первый вход регулятора 5 тока, на вход которого поступает сигнал U с выхода датчика 11 . На выходе регулятора 5 тока форми1)уется сигнал и Kg (), где К -коэффициент передачи регулятора 5 тока, КОТОРЫЙ поступает на усилитель 6 мощности. Сигнал Us с выхода усцлителя 6 мощности поступает на вход исполнительного двигателя 7, который через редуктор 8 поворачивает объект 9 регулирования, п.оложение которого измеряется датчиком 43 положения. Улучшение характеристик системы обеспечивается за счет корректирующего нелинейного преобразователя 10,. который установле н в обратной связи системы и на входы которого подаются сигнал с выхода датчика 11 тока и сигнал - ль с выхода дифференциатора 13, где К;ц XijP - коэффициент передачи дифференциатора 13. Сигналы 0 и и масштабируются в масштабирующих элементах 18 и 19 и поступают на входы умножителя 20, на выходе которого формируется сигнал U2g . ,,-U,.j , где 13 го коэффициенты передачи соответственно второго и третьего масштабирукмцих элементов 18 и 19 и умножителя 20, и поступает на вход Делимое делителя 21. Сигнал Щз поступает на вход нелинейного элемента 14, на выходе которого формируется сигнал U.( К - , где К - коэффициент передачи нелинейного элемента 14, который затем масштабируется в масштабирующем элементе 17 и подается на вход Делитель делителя 21. На выходе делителя 21 формируется сигнал и Iao/U fr где Kj.- коэффициент передачи делителя 21, который через ограничитель 15, коэффициент передачи которого представлен на фиг.З, подается на выход нелинейного преобразователя 10.
Сигнал с выхода нелинейного преобразователя 10 поступает на второй вход второго сумматора 16. Корректирующий нелинейный преобразователь 1П предназначен для ввделения сигнала, пропорционального сигналу возмущения F, действующему на объект 9 регулирования.
Отличительные особенности предлагаемого технического решения позволяют примерно в тридцать раз повысить помехозащищенность следящей системы при отслеживании полез ного входного сигнала с условиях
действия гармонического возмущения F переменной интенсивности.
Использование предлагаемой системы в автоматических измерительных комплексах позволяет повысить точность обработки информации и. реализации законов управления что в свою очередь повысит надежность информационно-измерительных комплексов и приведет к повышению качества автоматического управления технологическими процессами, чем определяется достигаемый техникоэкономический эффект от использовани предлагаемой следящей системы.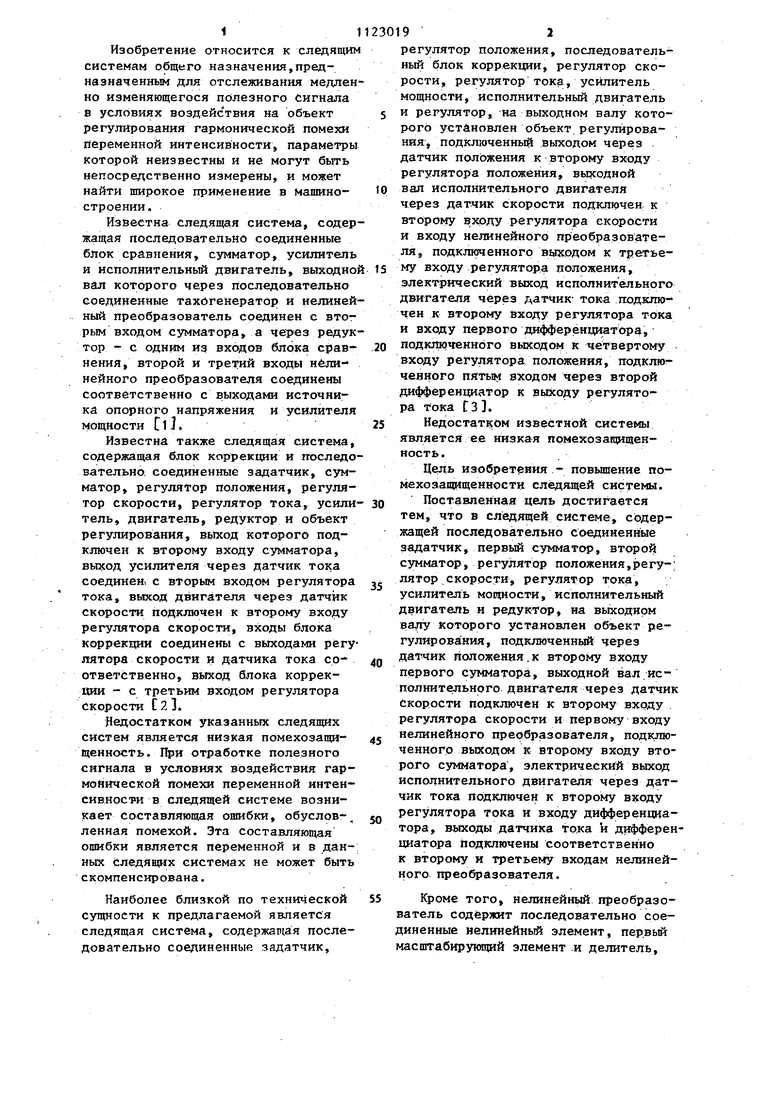

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Программный регулятор температуры | 1988 |
|
SU1594500A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1582178A1 |

1. СЛЕЛЯи1АЯ СИСТЕМА, содержащая последовательно соединен.ные задатчик, первый сумматор,второй сумматор, регулятор положения, регулятор скорости, регулятор тока, усилитель мощности, исполнительньй двигатель и редуктор, на выходном валу которого установлен объект регулирования, подключенный через датчик положения к второму входу первого сумматора, выходной вал исполнительного двигателя через датчик скорости подключен к второму входу регулятора скорости и первому входу нелинейного преобразователя, подключенного выходом к второму входу второго сумматора, электрический выход исполнительного двигателя через датчик тока подключен к второму входу регулятора тока и входу дифференциатора, отличающаяс я тем, что, с целью повышения помехозащищенности системы, в ней выходы датчика тока и ди еренциатора подключены соответственно к второму и третьему входам нелинейного преобразователя. 2. Система по п.1,о т ли ч а ющ а я с я тем, что нелинейный преобразователь содержит последовательно соединенные нелинейный элемент, первый масштабируадщнй элемент и делитель, вторым входом подключенный к выходу умножителя, а выходом через ограничитель - к выходу нелинейного преобразователя, первьм входом подключенного к входу нелинейного элемента, вторым входом через второй масштабирующий элемент к первому входу умножителя, а третьим входом через третий масштабирующий элемент - к второму входу уг ножителя.
Фиг.З
Фиг.2
Фмг-5
Ф11г.6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система | 1972 |
|
SU463095A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
