Изобретение относится к автоматике, в частности к адаптивным система управления, и может быть использовано, например, на буровых.
Цель изобретения - повьшение качества процессов управления, увеличение моторесурсов и экономия топлива.
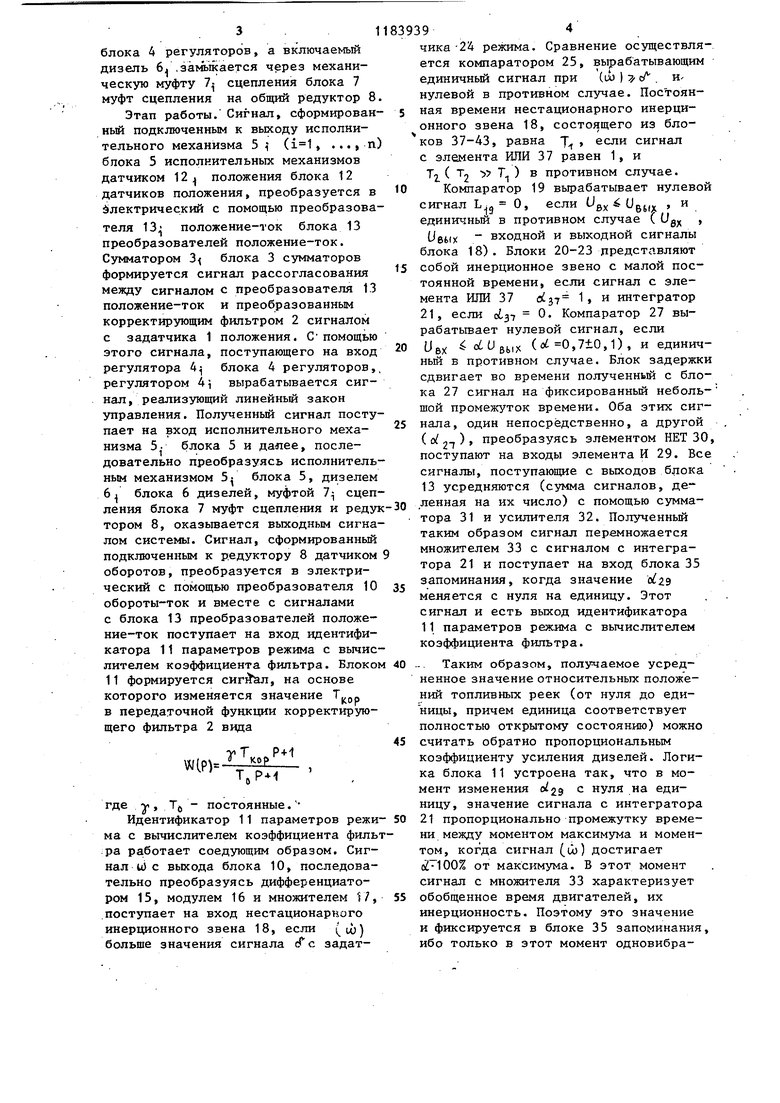
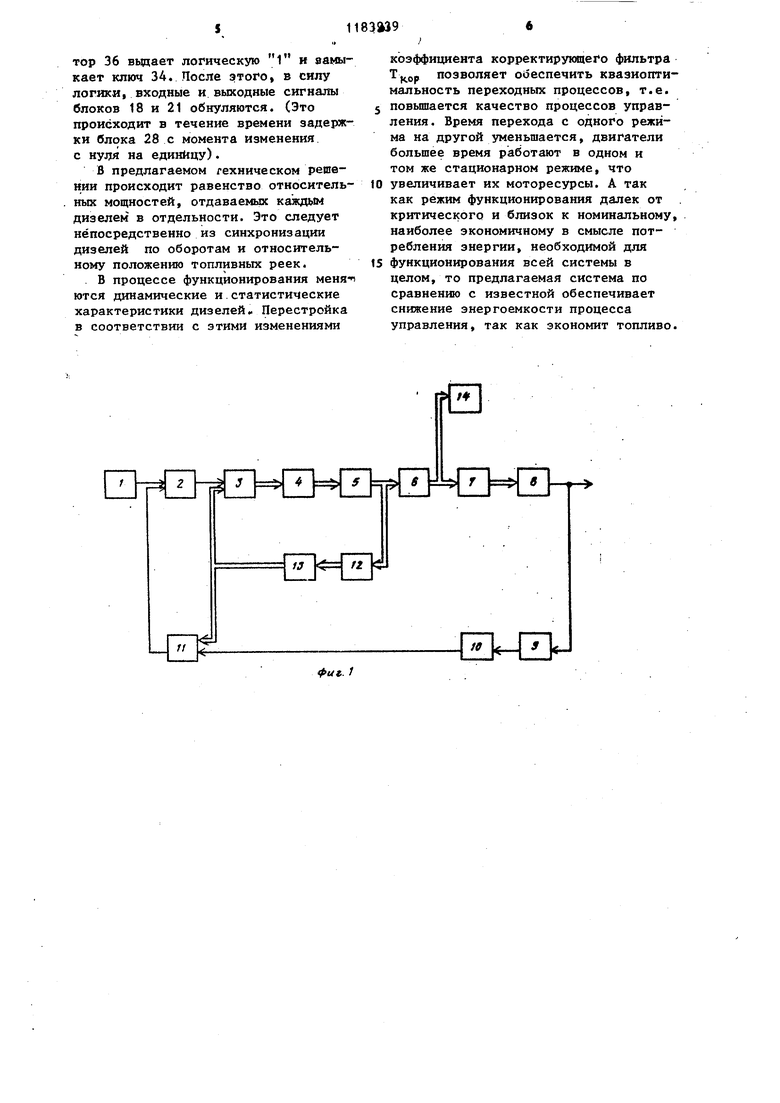
На фиг. 1 представлена структур ная схема предлагаемой адаптивной системы управления параллельно работающими дизельными установками; на фиг. 2 - вариант схемы реализации идентификатора параметров режима с вычислителем коэффициента фильтра; на фиг. 3 - вариант схемы реализации корректирующего фипьтра.
Система содержит последовательно соединенные задатчик 1 положения, корректирующий фильтр 2, блок 3 сумматоров, блок 4 регуляторов, блок 5 исполнительных механизмов (с ручным и автоматическим управлением), блок б дизелей, блок 7 муфт сцепления, редуктор 8, датчик 9 оборотов, преобразователь 10 обороты-ток и идентификатор 11 параметров режима с вычислителем коэффициента фильтра подключенный к второму входу корректирующего фильтра 2, последовательно соединенные блок 12 датчиков положения и блок 13 преобразователей положение-ток, причем его выходы подключены к входам блока 3 сумматоров и.идентификатора 11 параметров режима с вычислителем коэффициентов фильтра, а входы блока 12 датчиков положения соединены с. выходами блока 5 исполнительных механизмрв, блок 14 индикаторов оборотов, подключенный к выходу блока 6 дизелей.
Блок 11 содержит последовательно соединенные дифференциатор 15, вход которого соединен с выходом блока 10, модуль 16, множитель 17, нестационарное инерционное звено 18, компаратор 19, сумматор 20, интегратор 21, множитель 22 и усилитель 23, подключенный к другому входу сумматора 20, последовательно соединенные задатчик 24 режима и компаратор 25, вход которого соединен с выходом модуля 16, а выход с вторым входом множителя 17, последовательно соединенные усилитель 26, компаратор 27, блок 28 задержки и элемент И 29, второй вход которого
соединен через элемент НЕТ 30 с выходом компаратора 27, последовательно соединенные сумматор 31, к входам которого подключены выходы блока 13, усилитель 32, множитель 33, ключ 34 и блок 35 запоминания, а также содержит одновибратор 36. Выход множителя 17 соединен с вторыми входами компараторов 19 и 27. Вход усилителя 26 подключен к выходу нестационарного инерционного звена 18. Выход, интегратора 21 соединен с вторым входом множителя 33, а выход элемента И 29 подключен к входу элемента ИЛИ 37 блока 18 и соединен через одновибратор 36 с вторым входом ключа 34, выход же элемента ИЛИ 37 соединен с другим входом множителя 22.
Нестационарное инерционное звено 18 содержит последовательно соединенные интегратор 38, выход которого является выходом блока 18, сумматор
39,другой вход которого соединен с выходом множителя 17, и переключатель
40,второй вход которого соединен с выходом элемента ИЛИ 37. Выход переключателя 40 соединен с входами усилителей 41 или 42, выходы которых, подключены к входам интегратора 38. Выход компаратора 19 соединен с другим входом элемента ИЛИ 37 через элемент НЕТ 43 (не показан).
Корректирующий фильтр 2 содержит сумматор 44, связанный с входами сумматора 45 соответственно через последовательно соединенные усилитель 46 и интегратор 47 и последовательно соединенные усилитель 48 и множитель 49, вход которого подключен к выходу блока 11. Выход интегратора 47 и блока 1 подключены к входам сумматора 44, а выход сумматора 45 является выходом фильтра 2.
Система работает следующим образом.
Этап включения i-ro дизеля, (i-1) дизелей работают. С помощью ручного управления исполнительным механизмом 5- блока 5 на основе информации с блока 14 индикаторов оборотов обеспечивается равенство оборотов дизеля 6- блока 6 дизелей 6 с (i-1) работающими. После этого ручной режим управления исполнительным механизмом 5- переводится на автоматический и в дальнейшем управляется с помощью регулятора 4 из
31
блока 4 регуляторов, а включаемый дизель 6. ,за1Ф1кается через механическую муфту сцепления блока 7 муфт сцепления на общий редуктор 8 Этап работы. Сигнал, сформированньй подключенным к выходу исполнительного механизма 5 ( ..., п) блока 5 исполнительных механизмов датчиком 12 положения блока 12 датчиков положения, преобразуется в йлектричес.кий с помощью преобразователя 13 положение-ток блока 13 преобразователей положение-ток. CjTMMaTopoM 3 блока 3 сумматоров формируется сигнал рассогласования между сигналом с преобразователя 13 положение-ток и преобразованным корректирующим фильтром 2 сигналом с задатчика 1 положения. С помощью этого сигнала, поступающего на вход регулятора 4 блока 4 регуляторов,, регулятором 4i вырабатывается сигнал, реапизую1ций линейный закон управления. Полученный сигнал поступает на вход исполнительного механизма 5- блока 5 и далее, последовательно преобразуясь исполнительным механизмом 5 блока 5, дизелем 6, блока 6 дизелей, муфтой 7 сцепления блока 7 муфт сцепления и редуктором 8, оказьгоается выходным сигналом системы. Сигнал, сформированный подключенным к редуктору 8 датчиком оборотов, преобразуется в электрический с помощью преобразователя 10 обороты-ток и вместе с сигналами с блока 13 преобразователей положение-ток поступает на вход идентификатора 11 параметров режима с вычислителем коэффициента фильтра. Блоком 11 формируется , на основе которого изменяется значение Tj,jp в передаточной функции корректирующего фильтра 2 В1ада
ГТко.
WiP)
Т,РН
где у, Т(, - постоянные.
Идентификатор 11 параметров режима с вычислителем коэффициента фильтра ра.ботает соедующим образом. Сигнал и) с выхода блока 10, последовательно преобразуясь дифференциатором 15, модулем 16 и множителем 17, поступает на вход нестационарного инерционного звена 18, если (со) больше значения сигнала сГ с задат39394
чика -24 режима. Сравнение осуществляется компаратором 25, вырабатывающим единичный сигнал при (LU ) сЛ . И нулевой в противном случае. Постоян5 ная времени нестационарного инерционного звена 18, состоящего из 37-43, равна Т , если сигнал с элемента ИЛИ 37 равен 1, и Tj ( Tj Т ) в противном случае. 0 Компаратор 19 вырабатывает нулевой
Lj. О, если (Jgx и
сигнал
БМХ
19
единичньй в противном случае ( Ug , Ueux входной и выходной сигналы блока 18). Блоки 20-23 представляют
5 собой инерционное звено с малой постоянной времени, если сигнал с элемента ИЛИ 37 1 и интегратор 21, если 0637 0. Компаратор 27 вырабатывает нулевой сигнал, если
0 UBX (oi 0,7+0,1) , и единичньй в противном случае. Блок задержки сдвигает во времени полученньй с блока 27 сигнал на фиксированньй небольшой промежуток времени. Оба этих сигнала, один непосредственно, а другой ( 0 27 ) преобразуясь элементом НЕТ 30, поступают на входы элемента И 29. Все сигналы, поступающие с выходов блока 13 усредняются (сумма сигналов, деленная на их число) с помощью сумма. тора 31 и усилителя 32. Полученньй таким образом сигнал перемножается множителем 33 с сигналом с интегратора 21 и поступает на вход блока 35 запоминания, когда значение меняется с нуля на единицу. Этот сигнал и есть выход идентификатора 11 параметров режима с вычисхштелем коэффициента фильтра.
0 -. Таким образом, получаемое усредненное значение относительных положений топливных реек (от нуля до единицы, причем единица соответствует полностью открытому состоянию) можно
5 считать обратно пропорциональным
коэффициенту усиления дизелей. Логика блока 11 устроена так, что в момент изменения нуля на единицу, значение сигнала с интегратора
0 21 пропорционально промежутку времени между моментом максимума и моментом, когда сигнал (и)) достигает от максимума. В этот момент сигнал с множителя 33 характеризует
5 обобщенное время двигателей, их
инерционность. Поэтому это значение и фиксируется в блоке 35 запоминания, ибо только в этот момент одновибратор 36 вьщает логическую 1 к аамыкает ключ 34. После этого, в силу логики, входные и выходные сигналы блоков 18 и 21 обнуляются. (Это происходит в течение времени задержки блока 28 с момента изменения с НУЛЯ на единицу).
В предлагаемом техническом решении происходит равенство относительных мощностей, отдаваемых каждым дизелем в отдельности. Это следует непосредственно из синхронизации дизелей по оборотам и относительному положению топливных реек.
В процессе функционирования меняются динамические и.статистические характеристики дизелей.. Перестройка в соответствии с этими изменениями
коэффициента корректирукяцего фильтра позволяет обеспечить квазиоптимальность переходных процессов, т.е.
5 повышается качество процессов управления. Время перехода с одного режима на другой уменьшается, двигатели большее время работают в одном и том же стационарном режиме, что
to увеличивает их моторесурсы. А так как режим функционирования далек от критического и близок к номинальному, наиболее экономичному в смысле потребления энергии, необходимой для
15 функционирования всей системы в целом, то предлагаемая система по сравнению с известной обеспечивает снижение энергоемкости процесса управления, так как экономит топливо.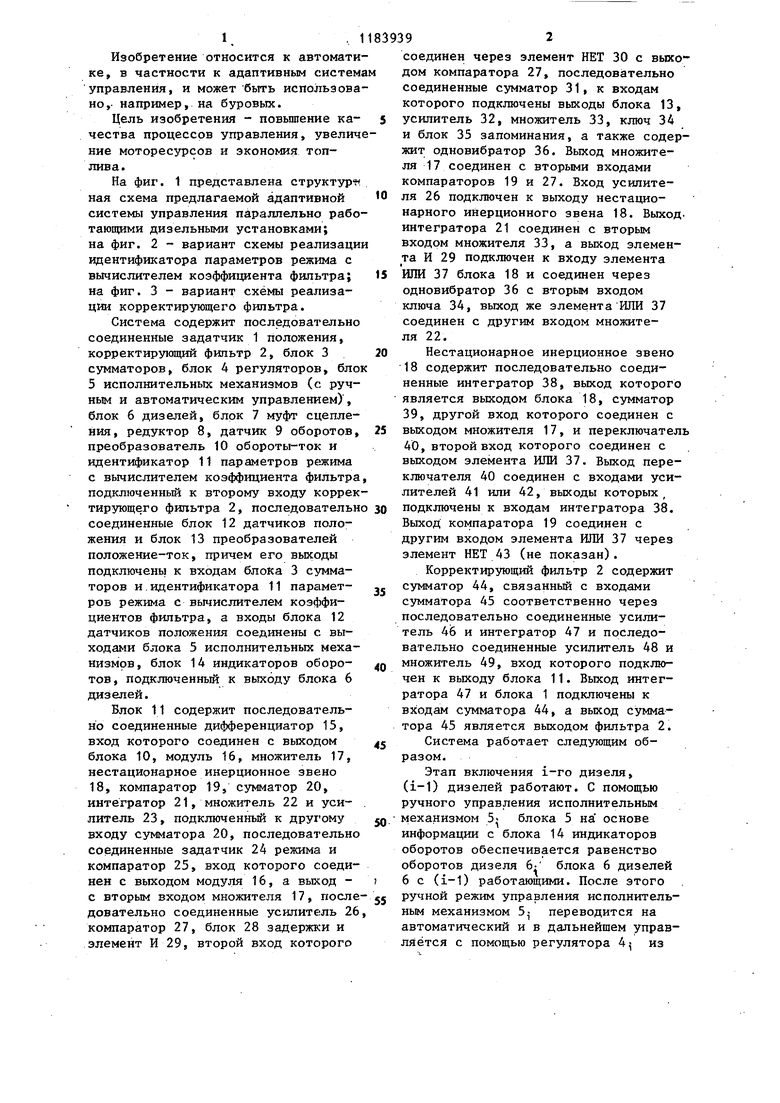
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления параллельно работающими дизельными установками | 1985 |
|
SU1252754A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1157523A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНО РАБОТАКЩИМИ ДИЗЕЛЬНЫМИ УСТАНОВКАМИ, содержащая последовательно соединенные блок сумматоров, блок регуляторов, .блок исполнительных механизмов, блок дизелей, блок муфт сцепления, редуктор, выход которого является выходом системы, датчик оборотов и преобразователь обороты-ток, а также блок индикаторов оборотов, подключенный к выходам блока дизелей, и задатчик положения, отличающаяся тем, что, с целью повышения качества процессов управления, увеличения моторесурсов и экономии топлива, она дополнительно содержит последовательно соединенные идентификатор параметров режима с вычислителем коэффициента фильтра и корректирующий фильтр, последовательно соединенные блок датчиков положения и блок преобразователей положение-ток, выходы которого (Л подключены к первым входам блока сумматоров, выход задатчика положе- ния через корректирующий фильтр соединен с вторыми входами блока сумматоров, выходы блока преобразователей положение-ток и выход- преобразователя обороты-ток подклочены к соответству00 00 ющим входам идентификатора параметров режима с вычислителем коэффициента со со со фильтра, а выходы блока датчиков положения подключены к выходам блока исполнительных механизмов.
иг. 3
| .Крутов В.И | |||
| Автоматическое регулирование двигателей внутреннего сгорания | |||
| М.: Машиностроение, 1968, с | |||
| Самовар-кофейник | 1918 |
|
SU354A1 |
| Алексеевский Г.В | |||
| Буровые установки Уралмашзавода, М.: Недра, 1971, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
