1
Изобретение относится к автоматике и телемеханики и может быть использовано, например, на буровых.
Цель изобретения - повышение качества процессов управления, увеличение моторесурсов и экономия топлива .
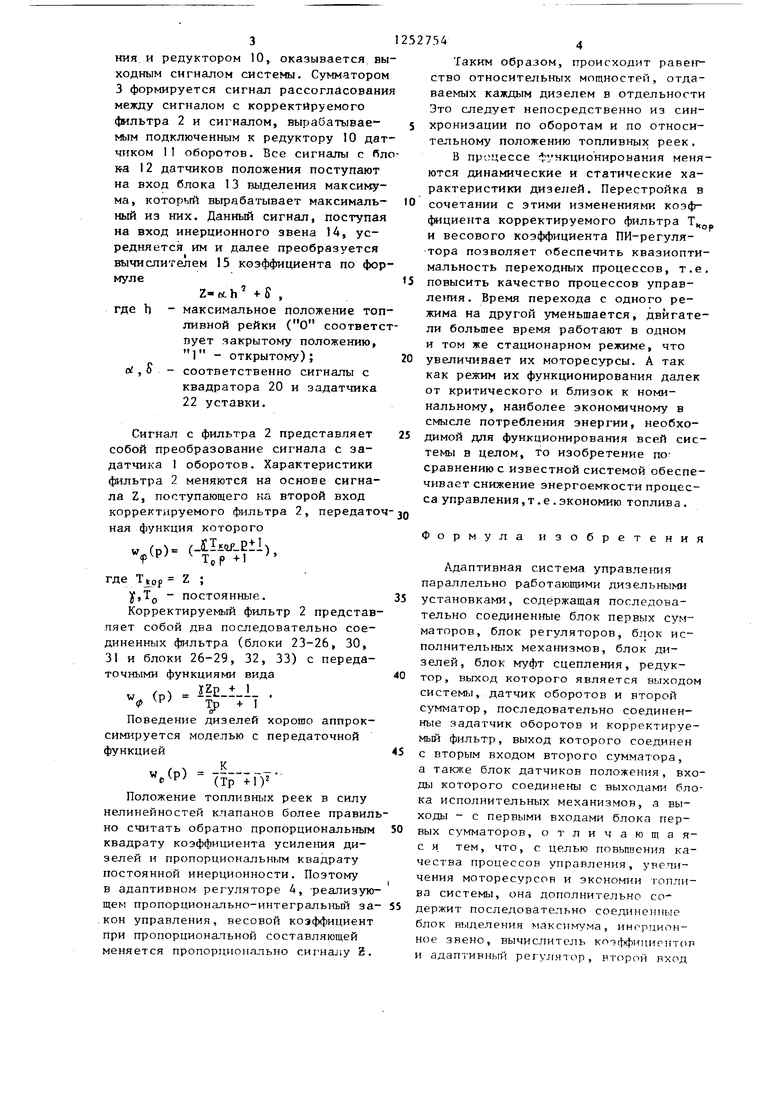
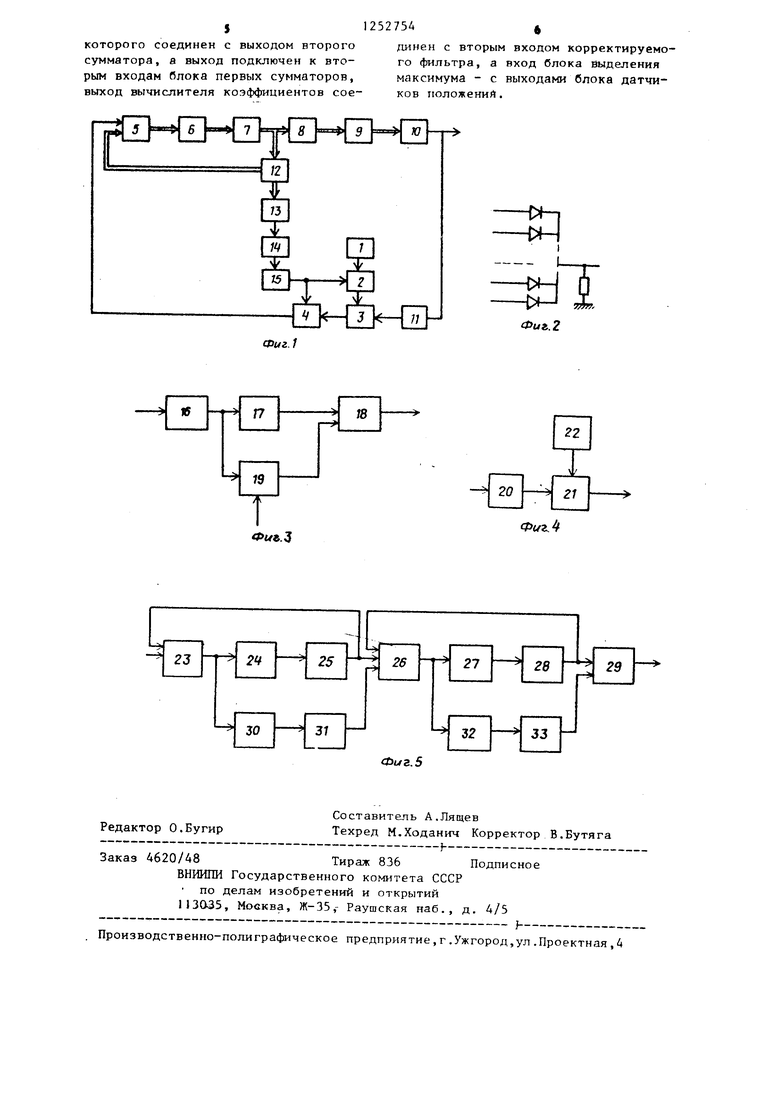
На фиг.1 представлена структурная схема предлагаемой адаптивной системы управления параллельно работающими дизельными установками; на фиг.2 схема реализации блока выделения мак симума; на фиг.З - схема реализации адаптивного регулятора; на фиг.4 - 1:хема реализации вычислителя коэффициента; на фиг.5 - схема реализациии корректируемого фильтра.
Система содержит последовательно соединенные задатчик 1 оборотов, кор ректируемый фильтр 2, сумматор 3, адаптивный регулятор 4, блок 5 сумматоров, блок 6 регуляторов, блок 7- исполнительных механизмов (с ручным и автоматическим управлением), блок 8 дизелей, блок 9 муфт сцепления, ре дуктор 10 и датчик П оборотов, выход которого соединен с вторым входом сумматора 3, последовательно соединенные блок 12 датчиков положения, блок 13 вьщеления максимума, инерционное звено 14 и вычислитель 15 коэффициентов, причем его выход подсоединен к входам адаптивного регулятора 4 и входу корректируемого фильтра 2, а входы и выходы блока датчиков 12 положения подключены соответственно к выходам блока 7 исполнительных механизмов и вторым входам блока 5 сумматоров.
Блок 13 выделения максимума содержит параллельно соединенные по входам диода, входы которых - входы блока. Адаптивный регулятор 4 содержит последовательно соединенные усилитель 16, вход которого - вход блока 4, интегратор 17 и сумматор 18, выход которого является выходом регулятора 4. Вход усилителя 16 через мноткитель 19 подключен к второму входу сумматора 18, второй вход множителя 19 соединен с выходом вычислителя 15 коэффициента. 1
Вычислитель 15 коэффициента содержит последовательно соединенные квад ратор 20 и сумматор 21 через выход- вход блока 15, к второму входу которого подключен эадатчик 22 уставки.
52754
Корректируекый фильтр 2 представляет собой последовательно соединенные сумматор 23, вход которого - вход фильтра 2, усилитель 24, интег- 5 ратор 25, выход которого - второй вход сумматора 23, с мматор 26, усилитель 27, интегратор 28, выход ко- торого - второй вход сумматора 26, и сумматор 29, которого явля- 10 ется выходом фильтра 2. Выход сумматора 23 через последовательно соединенные усилитель 30 и множитель соединен с третьим входом сумматора 26, выход которого через последова- 5 тельно соединенные усилитель 32 и множитель 33 соединен с третьим входом сумматора 29, а к вторым входам множителей 31 и 33 подключен выход
вычислителя 15 коэффициента.
Система работает следующим образом.
1 этап. Включение i-ro дизеля ((i-1) дизелей работают). С помощью ручного управления исполнительным механизмом 7, блока 7 обеспечивается равенство оборотов дизеля 8, блока 8 дизелей с (i-1) работающими. После этого ручной режим управления исполнительным механизмом 7| переводится на автоматический и в дальнейшем управляется с помощью регулятора 6; из блока 6 регуляторов, а включаемых дизель 8; замыкается через 35 механическую муфту 9; сцепления блока 9 муфт сцепления на общий редуктор 10.
2
30
40
45
2 зтап работы. Сигнал, суммированный подключенным к выходу исполнительного механизма 7, ( ,2, . . .). блока 7 исполнительных механизмов датчиком 12; положения блока 12 датчиков положения, поступает на вход сумматора 5, блока 5 сумматоров. На другой вход сумматора 5; поступает сигнал с адаптивного регулятора 3. Формируемый сумматором 5 сигнал рассогласования поступает на вход регулятора 6; блока 6 регуляторов, которым вырабатывается сигнал, реализующий линейный закон управления. Полученный сигнал поступает на вход исполнительного механизма блока 7 и далее,последовательно преобразуясь исполнительны механизмом 7 { блока 7. дизелем 8jблока 8 дизелей ,муфтой 9. сцепления блока 9 муфт сцепле-
55
3
ния и редуктором 10, оказывается выходным сигналом системы. Сумматором 3 формируется сигнал рассогласования между сигналом с корректируемого фильтра 2 и сигналом, вырабатываемым подключенным к редуктору 10 датчиком П оборотов. Все сигналы с Оле ка 12 датчиков положения поступают на вход блока 13 выделения максимума, который вырабатывает максимальный из них. Данный сигнал, поступая на вход инерционного звена 4, усредняется им и далее преобразуется вычислителем 15 коэффициента по формуле
Z-eth ff ,
где h - максимальное положение топливной рейки (о соответствует закрытому положению, 1 - открытому); of , S - соответственно сигналы с квадратора 20 и задатчика 22 уставки.
Сигнал с фильтра 2 представляет собой преобразование сигнала с задатчика 1 оборотов. Характеристики фильтра 2 меняются на основе сигнала Z, поступающего ка второй вход корректируемого фильтра 2, передато нал функция которого
. р)-(.
где Z ;
у,Т - постоянные.
Корректируемый фильтр 2 представляет собой два последовательно соединенных фильтра (блоки 23-26, 30, 31 и блоки 26-29, 32, 33) с передаточными функциями вида
/ч yzc + 1
TJ {Г) ) - -.-.-
Ф Р Тр + I
Поведение дизелей хорошо аппроксимируется моделью с передаточной функцией
К
Гтр + У
Положение топливных реек в силу нелинейностей клапанов более правилно считать обратно пропорциональным квадрату коэффициента усиления дизелей и пропорциональнъгм квадрату постоянной инерционности. Поэтому в адаптивном регуляторе 4, реализующем пропорционально-интегральный за .кон управления, весовой коэффициент при пропорциональной составляющей меняется пропорционально сигналу 2.
25
о
2527344
Таким образом, происходит равегг- ство относительных мощностей, отдаваемых каждым дизелем в отдельности Это следует непосредственно из син- 5 хронизации по оборотам и по относительному положению топливных реек.
В процессе /нкционирования меняются динамические и статические характеристики дизелей. Перестройка в
10 сочетании с этими изменениями коэф- (1мциента корректируемого фильтра Т, и весового коэффициента ПИ-регуля- тора позволяет обеспечить квазиоптимальность переходных процессов, т.е.
5 повысить качество процессов управления. Время перехода с одного режима на другой уменьшается, двигатели большее время работают в одном и том же стационарном режиме, что
20 увеличивает их моторесурсы. А так как режим их функционирования далек от критического и близок к номинальному, наиболее экономичному в смысле потребления энергии, необходимой для функционирования всей системы в целом, то изобретение по- сравнению с известной системой обеспечивает снижение энергоемкости процесса управления,т.е .экономию топлива.
Формула изобретения
Адаптивная система управления параллельно работающими дизельными установками, содержащая последовательно соединенные блок первых сумматоров, блок регуляторов, блок исполнительных механизмов, блок дизелей, блок муфт сцепления, редуктор, выход которого является выходом системы, датчик оборотов и второй сумматор, последовательно соединенные задатчик оборотов и корректируемый фильтр, выход которого соединен с вторым входом второго сумматора, а также блок датчиков положения, входы которого соединены с выходами блока исполнительных механизмов, а выходы - с первыми входами блока первых сумматоров, отличающая- с я тем, что, с целью повьпиения качества процессов управления, увеличения моторесурсов и экономии гопли- ва системы, она дополнительно co держит последовательно соединенные блок выделения максимума, инорцион- ное звено, вычислитель коэфф1-пи-1ентор и адаптивный регулятор, второй вход
которого соединен с выходом второго сумматора, а выход подключен к вторым входам блока первых сумматоров, выход вычислителя коэффициентов соединен с вторым входом корректируемого фильтра, а вход блока выделения максимума - с выходами блока датчиков положений.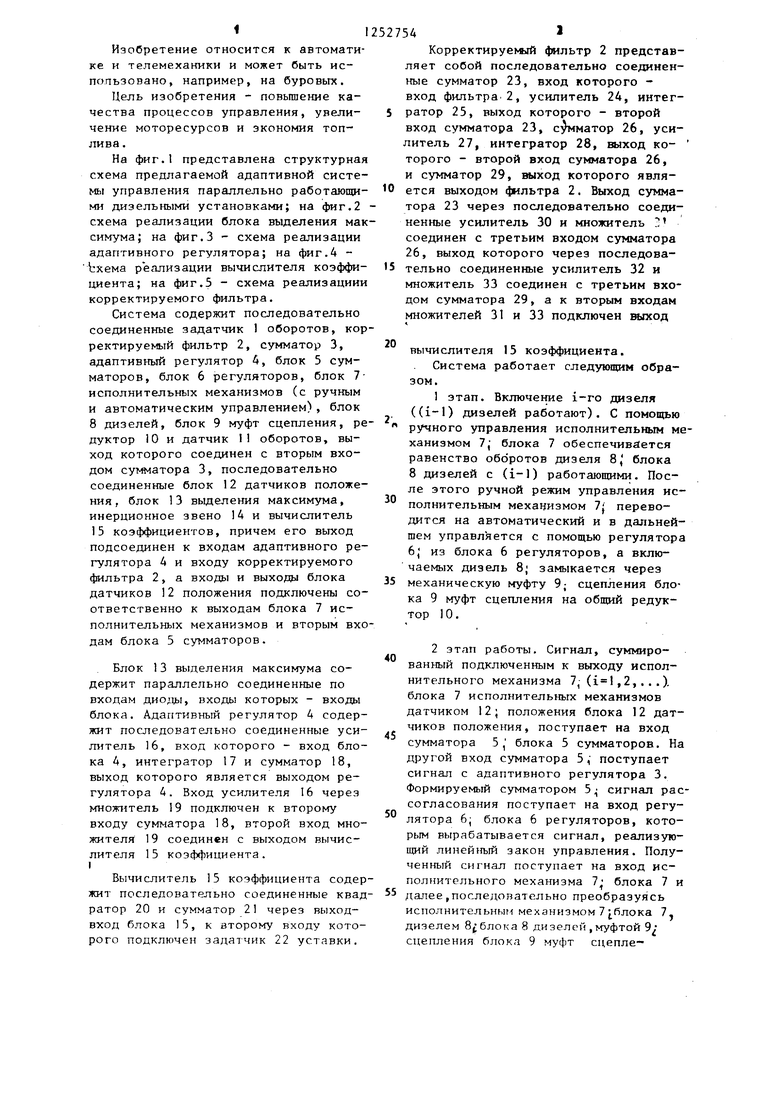
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1183939A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1157523A1 |
| Способ автоматического регулирования рабочего процесса дизеля и устройство для его осуществления | 1984 |
|
SU1213232A1 |
| Адаптивная система управления судовыми силовыми установками | 1981 |
|
SU981935A1 |
| Устройство для автоматическойОпТиМизАции пРОцЕССА буРЕНия | 1977 |
|
SU798277A1 |
| Адаптивный регулятор | 1982 |
|
SU1076873A1 |
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Система управления электроприводом | 1987 |
|
SU1589255A1 |
| РЕГУЛЯТОР РЕЖИМА РАБОТЫ СУДОВОГО ДИЗЕЛЯ | 1991 |
|
RU2011876C1 |
| Устройство для управления электроприводом робота | 1987 |
|
SU1491693A1 |
Изобретение относится к автоматике. Цель изобретения - повышение качества процессов управления, увеличение моторесурсов и экономии топлива. Отличие устройства, обеспечи- веющего достижение поставленной це- .ли, состоит в том, что система содержит последовательно соединенные блок выделения максимума, инерционное звено, вычислитель коэффициентов и адаптивный регулятор, второй вход которого соединен с выходом второго сумматора, а выход подключен к вторым входам блока первых сумматоров, выход вычислителя коэффициентов соединен с вторым входом корректируемого фильтра, а вход блока выделения максимума - с выходами блока датчиков положения. Устройство может найти широкое применение на буровых, где параллельно работают несколько дизельных установок. 5 ил. S сл to сл 1C СП 4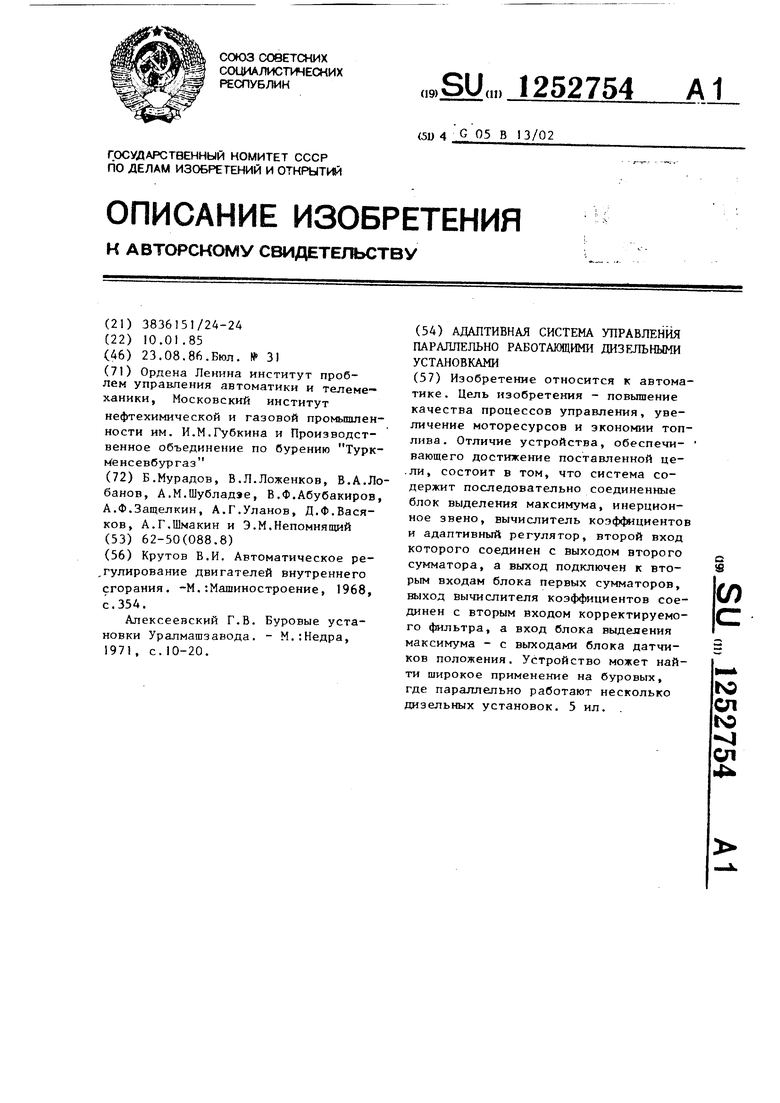
Фиг.4
Редактор О.Бугир
Составиталь А.Лящев
Техред М.Ходанич Корректор В.Бутяга
Заказ 4620/48Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий ПЗОЗЗ, Москва, Ж-35,- Раушская наб., д, 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Фиг. 5
| Крутов Б.И | |||
| Автоматическое ре- ,гулирование двигателей внутреннего сгорания | |||
| -М.:Машиностроение, 1968, с.354 | |||
| Алексеевский Г.В | |||
| Буровые установки Уралмашзавода | |||
| - М.;Недра, 1971, с.10-20. |
