00
ю ю о
N0
Јь
Изобретение относится к области автоматических регуляторов, в которых выходной сигнал является прерывной функцией отклонения от заданной величины, а именно к следящим системам, к которым предъявляются высокие требования по точности и быстродействию, и может быть использовано в системах автоматического регулирования промышленного назначения.
Целью изобретения является повышение быстродействия и динамической точности системы при различных передаточных функциях ее непрерывной части.
Введение в следящую систему новых элементов и связей позволяет реализовать в ней переходные процессы без перерегулирования за минимальное время при нулевых начальных условиях по скорости, где
h -длительность одного шага регулирования;
п -число шагов, равное порядку дифференциальных уравнений, описывающих динамику САУ, а также обеспечить высокую динамическую точность за счет включения корректирующего устройства при малых значениях ошибки.
На фиг. 1 представлена структурная схема следящей системы; на фиг. 2 - эпюры напряжений следящей системы 4-го порядка и вид ее переходного процесса.
Следящая система содержит последовательно соединенные блок сравнения 1, корректирующее устройство 2, ключ 3, предварительный усилитель 4, усилитель мощности 5, исполнительный двигатель 6 и объект регулирования 7, выход которого подключен к первому входу блока сравнения 1. Выход этого блока подключен также через последовательно соединенные устройство выборки - хранения (УВХ) 8, управляемый усилитель 9, сумматор 10, ключ 11 ко входу предварительного усилителя 4. Выход объекта регулирования 7 через последовательно соединенные измеритель скорости 12, УВХ 13, управляемый усилитель 14 подключен ко второму входу сумматора 10. К выходу блока сравнения подключены устройство синхронизации 15 и пороговое устройство 16. Выход устройства синхронизации 15 подключено ко входу формирователя импульсов 17, первый выход которого подключен к управляющим входам УВХ 8 и УВХ 13, второй - к управляющим входам управляемых усилителей 9 и 14, а третий ко второму входу порогового элемента 16. Выход порогового элемента 16 подключен ко входу формирователя импульсов 18, первый выход которого подключен к управляющему входу
ключа 3, а второй - к управляющему входу ключа 11.
Корректирующее устройство может быть выполнено в виде звена на резисторах и конденсаторах с передаточной функцией
W(P)
10
(TiP + i)(T2p + i)
TiT2P2+ Ti (1 +R2/Ri)P +1
Следящая система работает следующим образом.
При отсутствии на входе системы задающих воздействий величина ошибки 6(t) (фиг. 26) на выходе блока 1 тождественно равна нулю и по абсолютному значению не превышает зону нечувствительности порогового элемента. Пороговый элемент и последовательно с ним включенный формирователь импульсов вырабатывают такие импульсы, что первый ключ замкнут, а второй разомкнут. Таким образом, следящая система замкнута через последовательно включенные блок сравнения, корректирующее устройство, первый ключ, предварительный усилитель, усилитель мощности, исполнительный двигатель, объ- ектуправления и первый вход блока сравнения. Прохождение сигнала не изменится, если ошибка системы не превысит зону нечувствительности порогового элемента. Известно, что включение корректирующего устройства с требуемыми характеристиками
позволяет уменьшить динамическую ошибку следящей системы.
При подаче на вход САУ такого гадающего воздействия (фиг. 2а), чтобы сигнал ошибки системы $(t) (фиг. 26} с выхода блока
сравнения превысил зону нечувствительности порогового элемента (фиг, 2в), последний вырабатывает импульсы для формирователя импульсов 18 (фиг. 2 г,д), который в свою очередь переключает ключи,
Первый ключ размыкается, второй ключ - замыкается. Одновременно сигнал ошибки поступает на вход устройства синхронизации. На выходе последнего формируется импульс синхронизации (фиг. 2е), который
подается на вход формирователя импульсов 17, с первого выхода которого снимаются короткие импульсы с периодом Т для управляющих выходов УВХ 8 и 13 и импульсы для управляющих входов управляемых усилителей 9,14. Ошибка системы Q(t) запоминается в УВХ 8 на период , где п - порядок дифференциального уравнения, которым описывается предварительный усилитель, усилитель мощности, исполнительный двигатель и объект управления, ah- длительность одного управляющего импульса.
Также в УВХ 13 запоминается сигнал, пропорциональный скорости вала исполнительного двигателя на период T-nh. В раз- личные периоды h, 2h, 3h и 4h с выхода управляемого усилителя 9 снимаются импульсы различной полярности и амплитуды (фиг. 2з), которые определяются величиной и полярностью сигналов рассогласования САУ, а также величиной и знаком коэффициентов передачи управляемого усилителя в каждом интервале регулирования. Аналогично с выхода управляемого усилителя 14 снимаются импульсы различной амплитуды и полярности (фиг, 2и), которые определяются величиной и полярностью значений скорости объекта управления, а также величиной и знаком коэффициентов передачи управляемого усилителя 14 в каждом интер- вале регулирования. В сумматоре 10 происходит сложение сигналов с выходов управляемых усилителей и через второй ключ сформированный сигнал подается на вход предварительного усилителя, с выхода которого снимается напряжение Uynp (фиг. 2к). После срабатывания устройства синхронизации и формирователя импульсов 17 схемы последнего и порогового элемента запрещают переключение порогового эле- мента и формирователя импульсов 18 и ключей 3, 11 до полной отработки САУ ошибки под воздействием сигнала, снимаемого с выхода сумматора 10 за время Т nh, Под воздействием данного управления объект регулирования отрабатывает ошибку САУ за интерзалов без перерегулирования. Вид переходного процесса в следящей системе показан на фиг.2л. После этого схема возвращается в исходное состояние.
Таким образом, в предлагаемой системе, благодаря реализации контура управления при относительно большой ошибке с переменным коэффициентом усиления достигается увеличение быстродействия, а ре- ализация контура управления с помощью корректирующего устройства позволяет уменьшить динамическую ошибку САУ при относительно малой ее величине.
Экспериментальные исследования показали, что по сравнению с прототипом быстродействие системы повышается в З...3,5 раза, а динамическая ошибка системы уменьшается в 1,1...1,2 раза.
Формула изобретения Следящая система, содержащая сумматор, два ключа, предварительный усилитель, последовательно соединенные усилитель мощности, исполнительный двигатель и объект регулирования, выход которого подключен к первому входу блока сравнения, второй вход которого является входом системы, пороговое устройство, выход которого через первый формирователь импульсов подключен к управляющим входам ключей, отличающаяся тем, что, с целью повышения быстродействия и динамической точности, в нее введены корректирующее устройство, два устройства выборки и хранения, устройство синхронизации, второй формирователь импульсов, два управляемых усилителя, измеритель скорости, причем входы корректирующего устройства, первого устройства выборки и хранения, устройства синхронизации и порогового устройства подключены к выходу блока сравнения, выход корректирующего устройства через первый ключ соединен с входом предварительного усилителя, выход первого устройства выборки и хранения через последовательно соединенные первый управляемый усилитель, сумматор и второй ключ соединен с входом предварительного усилителя, выход объекта регулирования через последовательно соединенные измеритель скорости, второе устройство выборки и хранения, второй управляемый усилитель соединен с вторым входом сумматора, при этом выход устройства синхронизации соединен с входом второго формирователя импульсов, первый выход которого подключен к управляющим входам первого и второго устройства выборки и хранения, второй выход - к управляющим входам первого и второго управляемых усилителей, а третий выход - к второму входу порогового элемента.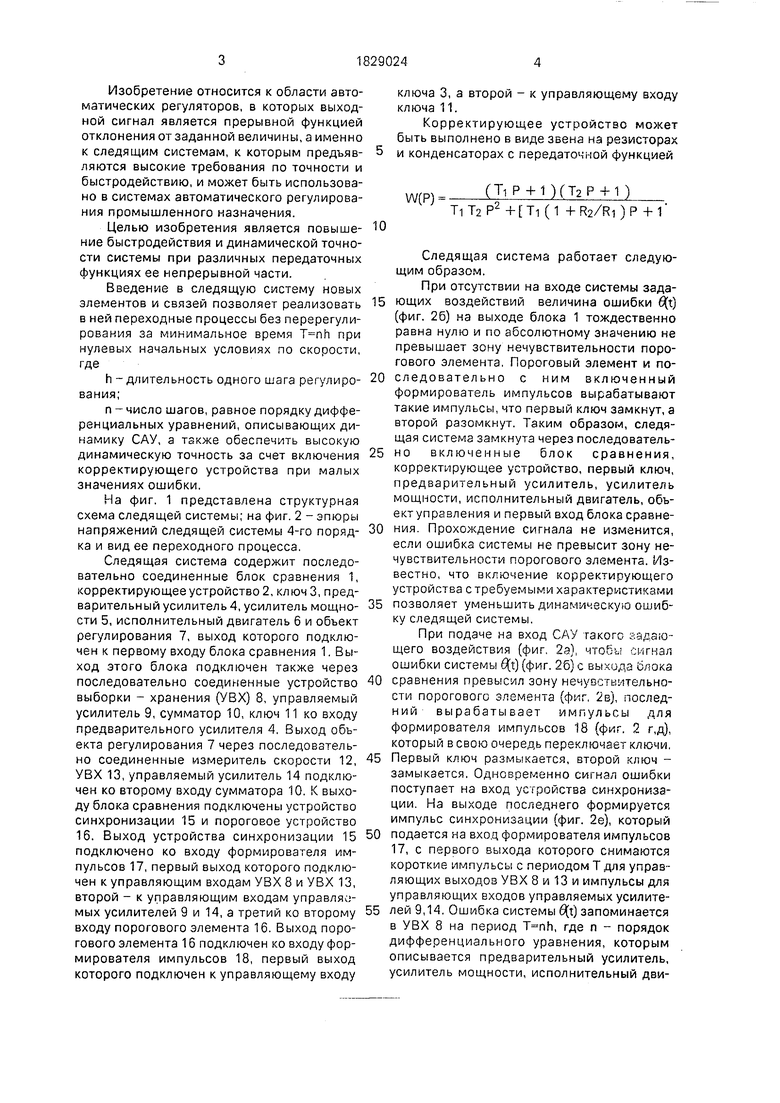
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1990 |
|
SU1829023A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2001 |
|
RU2208217C2 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| Следящаяя система | 1979 |
|
SU857926A1 |
Изобретение относится к автоматическим регуляторам, в которых выходной сиг- нал является прерывной функцией отклонения от заданной величины, и может быть использовано в системах автоматического регулирования промышленного назначения. Целью изобретения является повышение быстродействия и динамической точности следящей системы при различных передаточных функциях ее непрерывной части. Система содержит блок сравнения 1, корректирующее устройство 2, два ключа 3, 11, предварительный усилитель 4, усилитель мощности 5, исполнительный двигатель 6, объект регулирования 7, два устройства выборки хранения 8, 13, два управляемых усилителя 9,14, измеритель скорости 12, два формирователя импульсов 18, 17, устройство синхронизации 16, пороговый элемент 16, сумматор 10. 1-2-3-4-5-6-7- 1, 1-8-9-10-11-4, 1-15-17-9-10, 1-16-18-3, 17-16, 17-8,17-13-14-10, 17-14, 18-3, 18-11, 7-12-13. 2 ил. СО
//ЛТ
i
I
Wf
J) 1
i
|
-л L
3«(
П -
r
| Устройство для оптимального управления | 1978 |
|
SU769485A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
