Изобретение относится к системам управления и регулирования и может быть использовано для синхронизации приводов, например шаговых.
Известно устройство синхронизации вращения дисков, содержащее магнитные диски с нанесенными на них метками, которые совместно с магнитными детекторами образуют датчики скорости, фазовый детектор, подключенный к выходу датчиков скорости, интегратор, подключенный через цифроаналоговый преобразователь к выходу фазового детектора, две схемы управления ведомым и ведущим приводами Cl } .
Известное устройство обладает временной нестабильностью скорости, поскольку ведущий привод выполнен незамкнутым, т.е. датчик скорости не включен в регулирование зтим приводом. Вадомый привод отслеживает скорость ведущего привода в большом динамическом диапазоне из-за больших колебаний скорости последнего. В результате устройство Обладает погрешностью синхронизации. Кроме того, известная конструкция датчиков скорости не позволяет компенсировать погрешность синхронизации которая Ёозникает из-за зкс центрисета вала и диска.
Наиболее близким по технической сущности к изобретению является устройство для синхронизации приводов, содержащее генератор импульсов, подключенный к делителю частоты, усилитель, вход которого подключен кблоку сравнения, а выход - ко второму приводу, преобразователи уголкод, реверсивные счетчики, коммутаг тор, два датчика положения первого привода, импульсный датчик положения второго привода, фазовый дискриминатор, вход которого подключен к датчикам приводов и преобразователю угол-код второго привода, а выход объед1шен с одним из входов коммутатора, два других входа которого подключены к выходам генератора импульсов и делителя частоты, а выходы - к входам реверсивных счетчиков , входы которых подключены к выходам преобразователей угол-код, а . выходы - ко второму входу блока сравнения. Описанное устройство позволяет реализовать синфазное вращение двух точек валов и, соответственно, приводимых ими в движение
рабочих органов. При этом оно изменяет угловое (фазовое), рассогла. сование двух валов и в преде- лах заданной величины этого рассог5 ласованкя (погрешность перерегулирования) регулирует скорость второго привода относительно первого tZ.
Однако в гониометрических устрой0 ствах (в частности, в рентгеновских ) часто возникает необходимость производить измерения угловых положений цвух ( и более ) вращающихся объектов образом,чтобы прираще5 ния углов по двум или более координатами за строго определенный отрезок времени были одинаковы, т.е. привязка должна осуществляться не .только одного вала к друго0 му, а к базовому отсчету времени. Решение такой задачи особен. но затруднено, когда между валом двигателя и преобразователем уголкод установлен механический редук5 тор. В случае использования известного устройства в автоматических гониометрах ему присуща недостаточная точность синхронизации при водов. Это обусловлено наличием
0 погрешности перемещения, вносимой редуктором, а также отсутствием связи между преобразователем уголкод ведещуго вала и его приводом, что ведет к дополнительной погрешности вследствие колебаний скорости этого вала. Кроме того, при привязке измерений к базовому отсчету времени известное устройство из-за своих конструктивных особенQ ностей не учитьюает время вхождения в синхронизм.
Цель изобретения - повьш1ение точности синхронизации приводов. Для достижения поставленной цели, ,
р в устройство,содержащее два привода, два преобразователя угол-код,генератор импульсов, выход ом связанный со ., входом делителя частоты и первым входом коммутатора, в торой вход которого соединен с выходом делителя частоты, введены логический блок и счетчик редукции, выходом связанный с первым входом логического блока и управляющим входом коммутатора, вькодом подключенного к первым входам приво5 дон, управляющие входы которых соединены соответственно с первым и вторым выходами логического блока, второй и третий входы и третий выход которого связаны соответствен но с выходами первого и второго преобразователей угол-код и одним входом счетчика редукции, другим входом подключенного к первым вхо-, дам приводов, выходы которых связаны соответственно со входами первого и второго преобравователей угол-код.
Логический блок выполнен в виде двух RS - триггеров и трех элементов И, первые входы которых соединены между собой и являются первым входом логического блока, первый выход первого триггера подключен к вторым входам первого и второго элементов И, третий вход второго элемента И связан с первым выходом второго триггера, третий вхо третьего элемента И подключен к второму выходу первого триггера, третий вход второго элемента И соединен со вторым выходом второго триггера, первые входы триггеров, соединены с выходом второго эле1 1ента И, вторые входы триггеров, выходы первого, третьего и второго элементов И являются соответственно вторым и третьим входами, первым, вторым и третьим выходами логического блока.
На чертеже представлена блоксхема устройства.
Устройство содержит генератор импульсов 1, делитель частоты 2, коммутатор 3, счетчик редукции 4, первый привод 5, состоящий из блока 6 управления двигателем, двигат таль 7, редуктора 8, второй привод 9, состоящий из блока 10 управления двигателем, двигателя 11, редуктора 12, преобразователь уголкод 13 первого привода, преобразователь угол-код 14 второго привода, логический блок 15, включающий та себя RS - триггеры 16 и J 7 и элементы И 18 - 20,
При этом выход генератора I подключен к входу делителя частоты 2 и коммутатора 3, выход делителя частоты 2 - JKO второму входу коммутатора 3, выход коммутатора 3 подкл:очен ко входу счетчика редукции 4 и к каждому первому входу приводов и 9, выход счетчика редукции 4 подключен к управляющему входу коммутатора 3, а также к входу элементов И 18-20 логического блока 15 выходы преобразователей угол-код 13 и 14 подключены к входам RS - триггеров 16 и 17 соответственно,выход. элемента И 18 - ко второму входу счетчика редукции 4, выходы элементов И 19 и 20 подключены ко вторым входам блоков управления двигателями 6 и 10 соотв етственно.
Счетчик редукции 5 может быть выполнен, например, в виде счетчика с дешифратором, в общем случае
счетчик редукции имеет коэффициент пересчета, равный коэффициенту редукции редуктора, умноженному на отношение единицы дискретности измерения преобраэЬвате11я угол-код
5 к шагу перемещения вала двигателя. Блоки управления двигателями 6 и 10 могут быть реализованы, например, на основе универсальных сдвиговых регистров,
0 Устройство работает следующим образом,
В исходном состоянии до.поступления команды Старт от ЭВМ (на чертеже не -показана) генератор 1
5 не работает, сигналы на выходах
преобразователей угол-код, логического блока и счетчика редукции равны нулю. При поступлении команды Старт на вход генератора 1 он вырабатывает последовательность импульсов, которая поступает на делитель частоты 2, который подает импульсы пониженной частоты через коммутатор 3 одновременно на два привода 5 и 9, атакже на счетный вход счетчика редукции 4,i
Приводы 5 и 9 вращают преобразователи угол-код 13 и 14 , Счетчик редукции считает число, пропорциональное времени измерения, зависящее от частоты импульсов, поступающих от коммутатора 3,
Призаполнении счетчика редукг; : ции 4 он становится на самоблокировку, при этом на его вьрсоде появляется сигнал, который фиксирует момент, когда информация с преобразователей угол-код 13 и 14 должна измениться на единицу дискретности. Сигнал на выходе счетчика 4 Является опорным синхронизирующим сигналом, привязанным к базовому отсчету времени, т,е, к моменту, заданному командой Старт,
5 При этом возможны следующие варианты работы устройства.
При отставании во времени обоих валов приводов на выходе обоих пре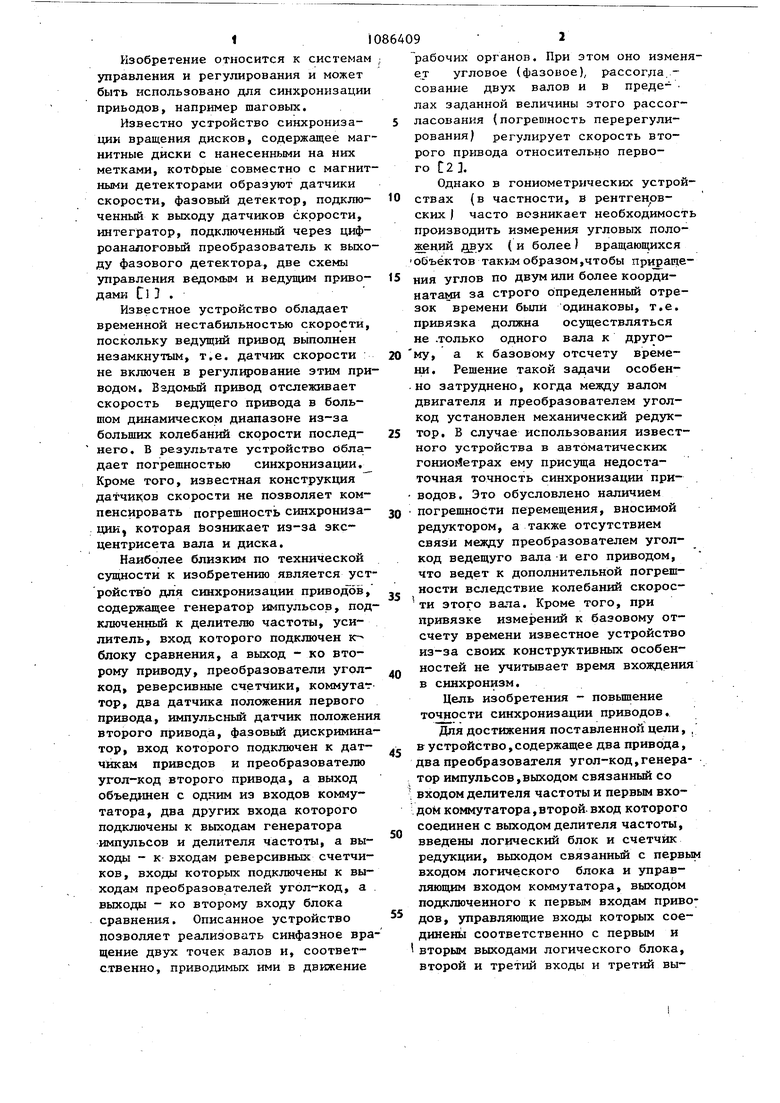

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки преобразователя угол-фаза | 1977 |
|
SU737975A1 |
| Устройство для измерения погрешности преобразователей угол-код | 1978 |
|
SU746679A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1980 |
|
SU894777A1 |
| Устройство для управления шаговыми двигателями | 1977 |
|
SU717748A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1076934A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU842895A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1980 |
|
SU868962A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Преобразователь угол-код | 1981 |
|
SU1001136A1 |
1. УСТРОЙСТВО ДЛЯ СИНХРО HИЗAЦИИ ПРИВОДОВ, содержащее два привода, два преобразователя уголкод, генератор импульсов, выходом связанный со делителя частог ты и первым входом коммутатора, второй вход которого соединен с выходом делителя частоты, о т л ичающееся тем, что, с целью повышения точности синхронизации, в устройство введены логический блок и счетчик редукции, выходом связанный с первым входом / логического блока и управляющим входом коммутатора, выходом подключенного к первым входам приводов, управляющие входы которых соединены соответственно с первым и вторым выходами логического блока, второй и третий i входы и третий выход которого связаны соответственно с выходами первого и второго преобразователей угол-код и одним входом счетчика редукции, другим , входом подключенного к первым входам приводов, выходы которых связаны .. соответственно со входами первого и второго преобразователей угол-код. 2. Устройство по П.1, о т л ичающееся тем,. что логический блок, вьшолнен в виде двух RS-триггеров и трех элементов И, первые входы которых соединены между собой и являются первым входом i логического блока, первый выход (П первого триггера подключен ко вторым входам первого и второго злементов И, третий вход второго злемента И связан с первым выходом второго триггера, третий вход третьего злемента И подключен ко второму выходу первого триггера, третий вход 00 второго злемента И соединен со втоо рым выходом второго триггера, пер4 вые входы триггеров соединены с выходом второго элемента И, вторые О СО входы триггеров, выходы первого, третьего и второго элементов И являются соответственно вторым и третьим входами, первым, вторым и третьим выходами логического блока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании, I 1477330, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для синхронизации приводов | 1976 |
|
SU610072A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
