о эс
4
сл
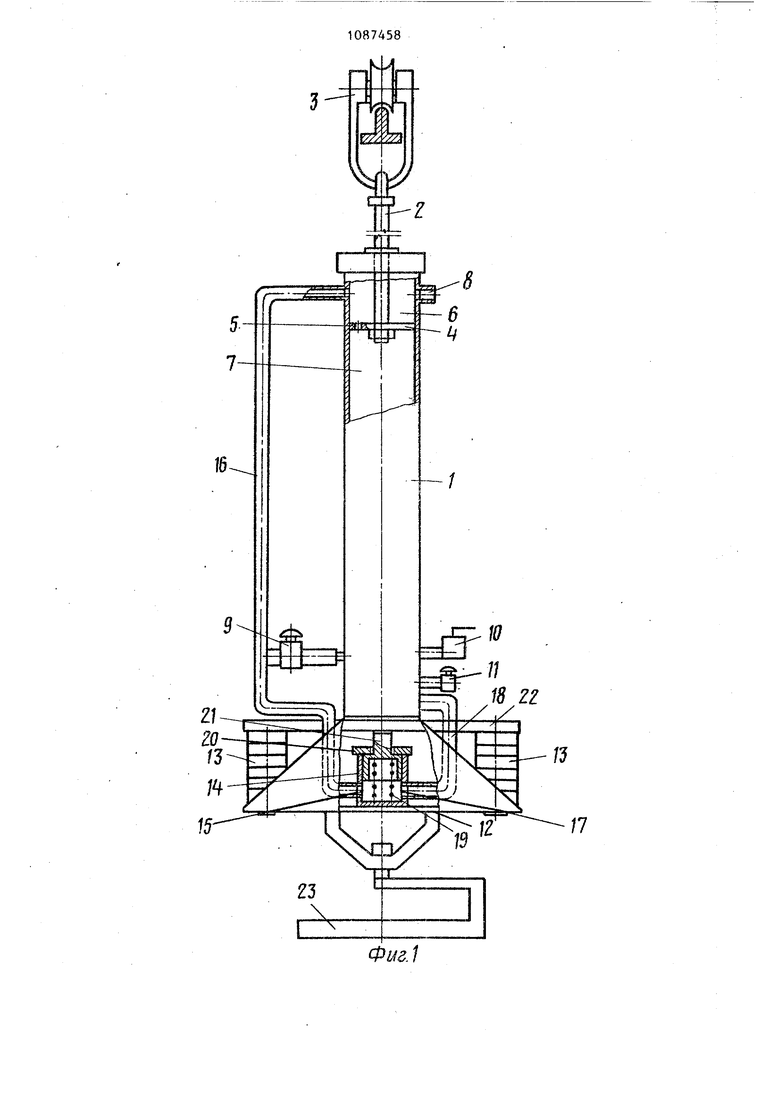
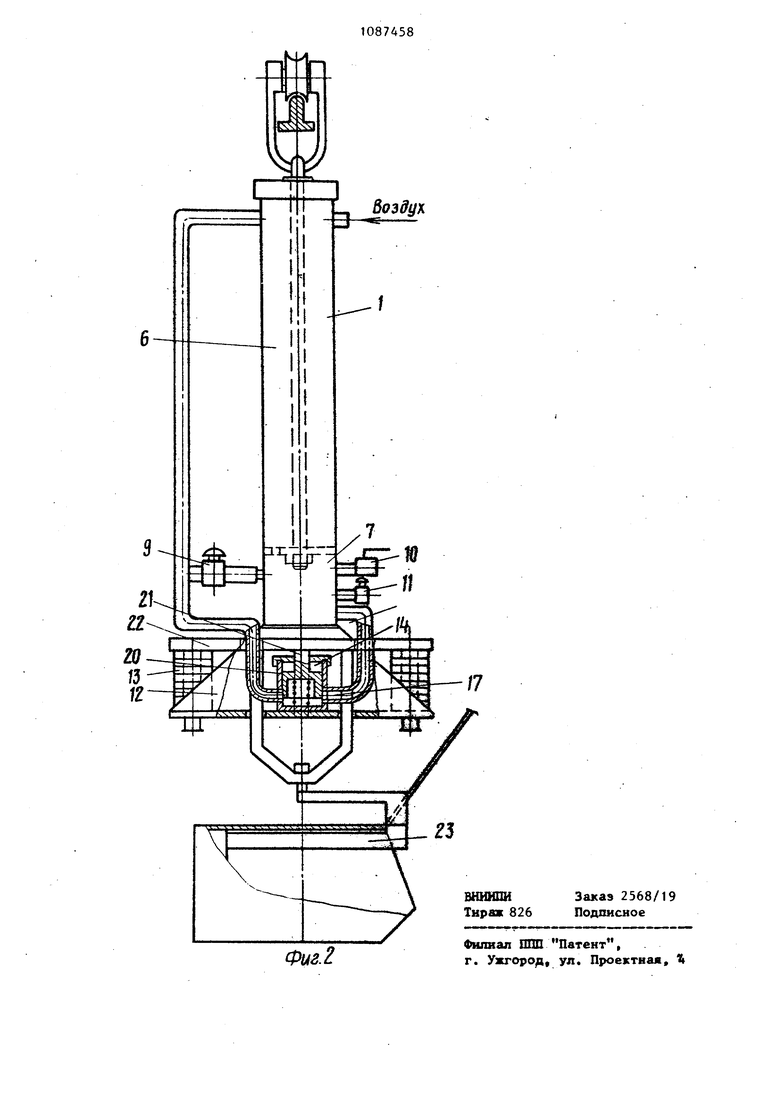
00 Изобретение относится к грузопод емным устройствам и может найти при менение во всех отраслях промышлен ности и народного хозяйства, где производятся монтажные и демонтажные работы и требуется уравновешивание в любом положении различных п весу грузов, например на предприяти железнодорожного транспорта при сбо ке буксовых узлов колесных пар. Известно устройство для перемещения груза, содержащее пневмоцилиндр, поршневая и штоковая полости которого соединены соответственно с атмосферой и источником сжатого воз духа, грузовую подвеску, расположен ный под пневмоцилиндром и соединенный с грузовой подвеской подпружиненный регулятор давления с золотником lj . Недостаток известного устройства сравнительно невысокие эксплуатационные качества. Цель изобретения - улучшение эксплуатационных качеств, S Цель достигается тем, что в устройстве для перемещения груза, соде жащем пневмоцилиндр, поршневая и штоковая полости которого соединены соответственно с атмосферой и источ ником .го воздуха, грузовую под веску, расположенный-под пневмоцилиндрсм к соединенный с- грузовой подвеской подпружиненный регулятор давления с золотником, в поршне п:-;евмод,илиндра выполнено калиброванное отверстие5 а регулятор давле ния pKji;o4aeT в себя жестко соединен ное с пневмоцилиндром основание с установленными на нем упругими эле1чентами и камерой, в которой размещен подпружиненный золотник с хвостoвикo j.. и установленнную на упруги элементах и хвостовике золотника траверсу, при этом грузовая подвеска жестко закреплена на траверсе. На.фиг. 1 изображено устройство для перемещения груза,, общий вид; иа фиг, 2 - то же, с поднятым грузом. Устройство содержит пневмоцилинд 1, шток 2 которого закреплен на опоре 3, а поршень 4 имеет калиброванное отверстие 5 и разделяет внут реннюю полость пневмоцилиндра 1 на штоковую 6 и поршневую 7 полости. Штоковая полость 6 сообщена отверстием 8 с источником сжатого воз духа (не показан) и через кнопочношариковый клапан 9 с поршневой полостью 7. Поршневая полость 7 через кран 10 и клапан 11 сообщена с атмосферой. На пневмоцилиндре 1 закреплен регулятор давления, выполненный в виде основания 12, на котором уста новлены упругие элементы 13 и камера 14, которая через входное отверстие 15 и воздуховод 16 соединена с штоковой полостью 6 пневмоцилиндра 1 а через выходное отверстие 17 и воздуховод 18 - с поршневой полостью 7. Внутри камеры 14 расположена пружина 19, на которой установлен золотник 20 с хвостовиком 21. На свободные концы упругих элементов 13 и торец хвостовика 21 опирается траверса 22, с которой жестко соединена грузовая подвеска 25. Устройство работает следующим образом. Штоком 2 устройство подвещивается к опоре 3. Пневмоцилиндр 1 под действием собственного веса опускается вниз. Через отверстие 8 к пнев модилиндру подводят сжатый воздух постоянного давления, который заполняет штоковую 6 и поршневую 7 полости п eвмoцилиндpa. В результате по обе стороны поршня создается равное по величине давление из-за наличия 3 поршне 4 калиброванного отверстия 5, соединяющего ютоковую и поршневую полости, и наличия свободного прохода для сжатого воздуха из штоковой полости по воздуховоду 16 через камеру 14 и воздуховод 18 в поршневую полость 7. Устройство готово к работе. Открывается кран 10, и воздух из поршневой полости начинает выходить в атмосферу. Давление в поршневой полости падает, в результате чего сжатый воздух из штоковой полости 6 поступает в поршневую полость 7 по воздуховоду 16 через камеру 14 и по воздух-оводу 18, а также через калиброванное отверстие 5 поршня 4. При этом в штоковой полости 6 поддерзкивается постоянное давление за счет непрерывного поступления сжатого воздуха в Пневмоцилиндр 1 через отверстие 8. Калиброванное отверстие 5 поршня 4, отверстия 15 и 17 камеры, а так3же проходное сечение крана 10 подоб раны таким образом, что разность давлений в штоковойи поршневой полостях уравновешивает массу собственно устройства. Подъем груза. После навешивания груза на грузовую подвеску 23 открывается клапан 11, при этом сжатьй воздух из поршневой полости 7 выходит в атмосферу. Под действием увеличенной разности давления в пор невой и штоковой полостях пневмоцилиндр 1 вместе с основанием 12 начинает подниматься вверх. В начал ный момент времени траверса 22,опираю щаяся на упругие элементы 13 и хвостовик 21 золотника 20, под дейс вием веса груза остается на месте, при этом упругие элементы 13 сжимаются, траверса давит на хвосто- . вик 21 золотника 20, заставляя его перекрывать отверстия 15 и 17 золот никовой камеры 14 до тех пор, пока на установится разность давлений в штоковой и поршневой полостях пне моцилиндра, уравновешивающая вес груза. В зависимости от веса груза, золотник перекрывает отверстия 15 и 17 камеры 14 на величину, пропорцио нальную весу груза. После того, как вес груза уравно вешивается (клапан 11 продолжает оставаться открытым), грузовая подвеска с грузом поднимается вверх. По достижении нужной высоты клапан П закрывается, давление сжатого воздуха в поршневой области повышается на величину, при которой разность давлений в штоковой и поршневой полостях уравновешивает массу устройства с поднимаемым грузом. Опускание груза. Дпя опускания грузовой подвески с грузом на нужную высоту нажатием на кнопку кнопочно-шарикового клапана 9 открыва ется доступ сжатого воздуха из што ковой полости в поршневую полость в результате чего давление в после ней увеличивается и пневмоцилиндр вместе с грузовой подвеской опуска ется вниз. По достижении нужной высоты кно ка отпускается, закрывается кнопоч шариковый клапан 9, и пневмоцилинд 1 с грузовой подвеской перестает п ремещаться. При этом в пневмоцилин 8 ре опять устанавливается разность давлений, уравновешивающая массу , устройств вместе с грузом, т.е. груз остается висеть на нужной высоте. При выполнении монтажных работ обычно производят различные пространственные перемещения груза с целью точного совмещения сопрягаемый деталей. Уравновешенный груз легко перемещается в вертикальной и горизонтальном положениях при приложении к пневмоцилиндру 1 минимальной силы. Поэтому манипулирование грузом может осуществляться как вручную, так и при помощи клапанов 9 и 11. Например, при монтаже буксового узла букса, подвешенная на данном устройстве, подводится к колесной паре, а затем вручную смещается на шейку оси, освобождая грузовую подвеску. При этом грузовая подвеска остается в том же положении, так как упругие элементы 13 вследствие снятия нагрузки разжимаются и золотник 20 под действием пружины t9 перемещается вверх, полностью открывая отверстия 15 и 17 камеры 14, в результате чего создается разность давления в штоковой и поршневой полостях, уравновешивакнцая массу самого устройства. В случае необходимости можно опустить груз на установочную поверхность с помощью включения кнопкой кнопочно-шарикового клапана 9. После соприкосновения груза с поверхностью пневмоцилиндр 1 продолжает опускаться вниз, освобождая траверсу с грузовой подвеской от нагрузки. Кнопка отпускается, закрывается кнопочношариковый клапан 9, груз отсоединяется от грузовой подвески, закрывается кран 10, и устройство вновь готово к повторному использованию. Таким образом, предлагаемое устройство позволяет производить плавное перемещение груза, мгновенно приходя в состояние равновесия при СНЯТИИ возмущающей силы. Кроме того, устройство обладает простотой и надежностью в эксплуатации. Использование изобретения обеспечивает удобство при проведении монтажных и ремонтных работ.
f6
8
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручное устройство для сборки | 1987 |
|
SU1447515A1 |
| Пневматический зарядчик для непатронированных взрывчатых веществ | 1989 |
|
SU1739177A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
| РАБОЧИЙ ОРГАН ДЛЯ РЫХЛЕНИЯ ГРУНТА | 1991 |
|
RU2042773C1 |
| Грузозахватная траверса | 1983 |
|
SU1165627A2 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1972 |
|
SU334164A1 |
| АВТОМАТИЧЕСКИЙ ВОЗДУШНЫЙ ОДНОПРОВОДНОЙ ТОРМОЗ | 1926 |
|
SU5156A1 |
| Сбалансированный манипулятор | 1990 |
|
SU1826956A3 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА, содержащее пневмоцилиндр, поршневая и штоковая полости которого соединены соответственно с атмосферой и источником сжатого воздуха, грузовую подвеску, расположенный под пневмоцилнндром и соединенный с грузовой подвеской подпружиненный регулятор давления с золотником, отличающееся тем, что, с целью улучшения эксплуатационных качеств, в поршне пневмоцилиндра выполнено калиброванное отверстие, а регулятор давления включает в себя жестко соединенное с пневмоцилиндром основание с установленными на нем упругими элементами и камерой, в которой размещен подпружиненный золотник с хвостовиком, и установленную на упругих элементах и хвостовике золотника траверсу, при § ,этом грузовая подвеска жестко закрепW лена на траверсе.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
