Изобретение относится к грузоподъемным механизмам и может быть использовано во всех отраслях промьт- ленности как подъемно-транспортное средство.
Цель изобретения - расширение эксплуатационных возможностей путем автоматического уравновешивания грузов со смещенным центром масс.
На фиг.Г схематически показан подъемник-манипулятор с уравновешиванием груза; на фиг.2 - система управления подъемником-манипулятором по первому варианту5-на фиг.З - то же, по второму варианту.
Подъемник-манипулятор с уравновешиванием груза со-держит стойку 1 , на которой шарнирно закреплены пнев- моцилиндр 2 и грузовая стрела, выполненная в виде шарнирного параллело- грамма 3 с грузовым рычагом 4, являющимся продолжением малого звена шарнирного параллелограмма 3, и противодействующим рычагом 5, являющимся продолжением большого звена шарнир- ного параллелограмма. На конце грузового рычага 4 закреплен грузозахватный орган 6 и шарнирно закреплена рукоятка-рычаг 7 для перемещения стрелы. На продолжении противодей- ствующего рычага 5 размещен противовес 8. Шток пневмоцилиндра 2 соединен с грузовой стрелой шарниром 9, расположенным в вертикальном пазу, выполненном.в стойке 1, а на противо действующем рычаге 5 размещен другой шарнир 10, расположенный в горизонтальном пазу 11. Противоположный конец рукоятки-рычага 7 по мере необходимости в зависимости от нап- равления усилия, приложенного к рукоятке-рычагу, воздействует на двух- позиционный распределитель 12. На стойке размещены датчик 13 массы, регулятор 14 давления, датчик 15 об- ратной связи,ч входящие в систему управления подъемником-манипулятором
По второму варианту (фиг.З) датчи 16 массы объединяет функции датчика 13 массы и датчика 15 обратной связи (по первому варианту).
На грузозахватном органе подвешен груз 17.
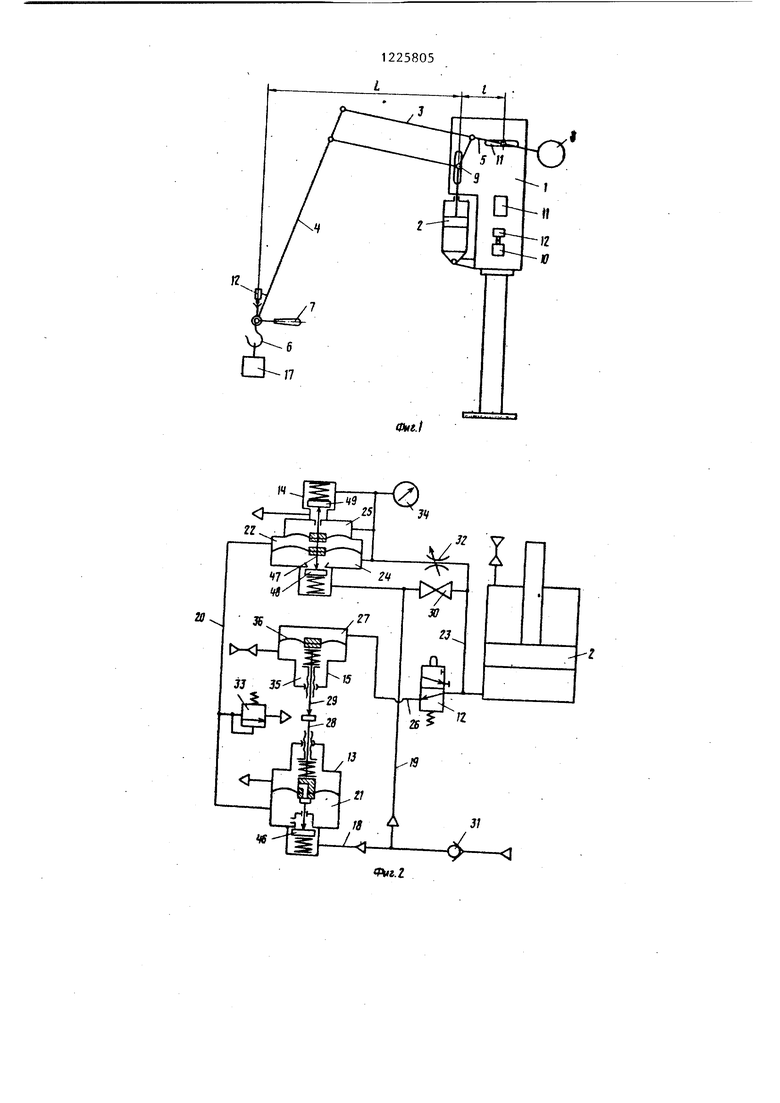
Система управления подъемником- манипулятором с уравновешиванием груза по первому варианту (фиг.2) выполнена следующим образом.
Пневматическая магистраль трубопроводами 18 и,19 соединена с датчиком 13 -массы и регулятором 14 давления. Трубопроводом 20 подмембранная камера 21 (камера сигнального давле- ния) датчика 13 массы соединена с межмембранной камерой 22 (камерой настроечного давления) регулятора 14 давления. Поршневая полость пневмоцилиндра 2 трубопроводом 23 соединена с подмембранной 24 и надмембранной 25 камерами регулятора 14 давления и трубопроводом 26 через двухпозицион- ный распределитель 12 - с надмембранной камерой 27 датчика 15 обратной связи. Толкатели 28 и 29 -датчиков массы 13 и обратной связи 15 имеют непосредстве.нный контакт в начальном положении (соприкосновение в точке А, фиг.2).
Посредством двухпозиционного распределителя 12 можно в процессе перемещения груза перекрывать трубопровод 26. Для первоначального заполнения систем1з1 сжатым воздухом установлен вентиль 30. На трубопроводах установлены обратный клапан 31, регулируемый дроссель 32, предохранительный клапан 33 и манометр 34. Подмембранная камера 35 датчика 15 обратной связи соединена с атмосферой. Толкатель 29 датчика 15 обратной связи жестко соединен с мембраной 36, установленной в корпусе датчика обратной связи.
Датчик массы 16 в подъемнике-манипуляторе по второму варианту (фиг.З) выполнен следующим образом.
В корпусе датчика 16 массы установлены два подпружиненных клапана 37 и 38, которые могут взаимодействовать с толкателем 39. В корпусе датчика 16 массы смонтированы две мембраны 40 и 41, жестко связанные с толкателем 39. Мембраны 40 и 41 образуют в корпусе датчика 16 массы три камеры: надмембранную 42, межмембранную 43 и подмембранную 44. По второму варианту (фиг.З) функции датчиков обратной связи и массы совмещены в функции, выполняемые одним устройством- датчиком 16 массы. Поршневая полость пневмоцилиндра 2 через двухпозицион- ный распределитель 12 соединена с межмембранной камерой 43 датчика 16 массы. Подмембранная камера 44 (камера сигнального давления) датчика 16 массы соединена.с надмембранной камерой 42 и надклапанной полостью 45 последнего, а также с камерой 22 настроечного давления регулятора 14 давления.
Подъёмник-манипулятор с уравновешиванием груза работает следующим образом.
При отсутствии сжатого воздуха масса стрелы с грузозахватным органом уравновешивается противовесом 8 При наличии груза 17 уравновешивание производится сжатым воздухом под поршнем пневмоцилиндра 2. Перво- .начальное заполнение системы сжатым воздухом производится открытием вентиля 30. Избыток воздуха при открытом вентиле 30 сбрасывается в атмосферу через регулятор 14 давления. Вентиль 30 закрывается до прихода стрелы с грузом в крайнее верхнее положение, а избыток воздуха после закрытия вентиля 30 сбрасывается из системы в атмосферу через датчик 13 массы (во втором варианте через датчик 16 массы). В случае прихода стрелы в крайнее верхнее положение (полное заполнение пневмоцилиндра 2 сжатым воздухом) оператор производит сброс избытка воздуха вручную, подачей стрелы вниз за рукоятку- рычаг 7.
Устройство по первому варианту (фиг.2) работает следу15щик образом.
Воздух с давлением Р, созданным усилием на. штоке пневмоцилиндра 2 заполняет надмембранную камеру 27 датчика 15 обратной связи (фиг.2). Толкатель 29 датчика обратной связи воздействует на толкатель 28 датчи- ка 13 массы. Соответственно усилию открывается впускной клапан 46 I датчика 13 массы и из магистрали : в подмембранную камеру 21 (сигнального давления) последнего и межмембранную камеру 22 (настроечного давления) регулятора 14 давления поступает воздух. При выравнивании давления в межмембранной камере 22 с давлением в надмембранной 25 и под- мембранной 24 камерах регулятор 14 давления приходит в равновесие, поступление и сброс воздуха прекращаются и вся система, т.е. пневмоцилиндр 2, подмембранная камера 27 датчика 15 обратной связи и подмембранная камера 21 датчика 13 массы заполнены воздухом с давлением Р . Уравновешенный груз перемещается оператором вручную за рукоятку-рычаг 7. .,
Рукбятка (фиг.1) выполнена в виде шарнирно закрепленного и изогнутого под углом 90 рычага, одно плечо
которого является ручкой для перемещения стрелы, а второе для одновременного нажима на запорный элемент двухпозиционного распределителя 12.
Последний срабатьшает при приложении к рукоятке 7 усилия вверх или вниз и остается в исходном (открытом) положении при приложении усилия к рукоятке-рычагу в любом
направлении в горизонтальной плос- крсти.
При подъеме груза оператор тянет рукоятку-рычаг вверх,. одновременно воздействуя на двухпозиционный распределитель 12 и, тем самым, перекрывая трубопровод 26. Прикладывая усилие вверх, оператор уменьшает усилие на штоке пневмоцилиндра 2. Давление под поршнем пневмоцилиндра
2 уменьшается. Уменьшается давление в надмембранной 25 и подмембранной 24 камерах регулятора 14 давления, а настроечное давление в межмембранной камере 22 остается неизменным
(прежним давлением Р). За счет разницы площадей мембран регулятора 14 давления соединенный с мембранами толкатель 47 перемещается в сторону открытия впускного клапана 48. Впускной клапан открывается и под поршень пневмоцилиндра 2 поступает до-- полнительный воздух. Происходит подъем поршня пневмоцилиндра 2, т.е. подъем груза. При снятии усилия с
рукоятки-рычага 7 подъем прекращается, так как исчезает внешнее воздействие на замкнутую систему сил. Давление под поршнем пневмоцилиндра 2 прежнее - Р, но объем поршневой полости увеличивается.
При опускании стрелы нажатием на рукоятку-рычаг 7 оператор нажимает на двухпозиционный распределитель 12 и перекрывает трубопровод 26, а
давление под поршнем пневмоцилиндра 2 и в надмембранной и подмембранной камерах регулятора 14 давления увеличивается. Давление в межмембранной камере 22 прежнее - Р. Толкатель
регулятора давления перемещается в сторону открытия выпускного клапана 49. Последний открывается, происходит сброс воздуха в атмосферу. При
прекращении внешнего воздействия (снятие руки оператора с рукоятки- рычага 7) опускание груза прекращается. Давление под поршнем пневмоци- линдра 2 прежнее - Р, но объем по р- шневой полости уменьшается.
При горизонтальном перемещении стрелы в общем случае давление под поршнем пневмоцилиндра 2 может изменяться за счет изменения величины грузового момента (центр масс груза -не совпадает с грузозахватным органом) , При горизонтальном ведении стрелы оператор прикладывает усилие к рукоятке-рычагу 7 вправо или вле- во, не воздействуя на двухпозицион- ный распределитель 12. Изменение « давления под поршнем пневмоцилиндра 2 передается в надмембранную камеру 27 датчика 15 обратной связи (фиг.2) Толкатель 29 датчика 15 обратной связи воздействует на. толкатель 28 датчика 13 массы. Изменяется в ту или иную сторону величина прогиба мембраны датчика 13 массы. В случае понижения давления в пневмоцилиндре 2 соответственно понижается давление в надмембранной камере 27. Усилие на толкателях 29 и 28 датчика 15 обратной связи и датчика 13 массы уменьшается. Прежнее давление Р в подмембранной камере 21 датчика 13 массы и межмембранной камере 22 регулятора 14 давления прогибает мембрану датчика 13 массы в сторону откры- тия спускного отверстия датчика 13 массы(фиг.2, вверх), и избыток давления из подмембранной 21 и межмембранной 22 камер сбрасывается в атмосферу. Давление в межмембранной камере 22 регулятора 14 давления понижается до уровня давления в пневмоцилиндре 2, т.е. до Р Р в соответствии с уменьшением грузового момента. Объем поршневой полости пневмоцилиндра остается прежним.
Для создания необходимого опережения в срабатывании датчика 13 массы относительно регулятора 14 давления (сотые доли секунды) поставлен регулируемый дроссель 32. При соответствующем подборе длин и сечений трубопроводов необходимость в дросселе отпадает.
При увеличении грузового момента соответственно повьшается давление в пневмоцилиндре 2 и в надмембранной камере 27 датчика 15 обратной связи Увеличивается усилие на толкателях 29 и 28 датчиков обратной связи 15 массы 13. Мембрана датчика массы 13 прогибается в сторону открытия впускного клапана 46 (фиг.2, вниз) и в подмембранную камеру 21 датчика массы и межмембранную камеру 22 регулятора давления поступает дополнительный воздух. Давление в межмембранной камере 22 регулятора 14 давления повышается до уровня давления в пневмоцилиндре, т.е. до Р Р в соответствии с увеличением грузового момента.
Объем поршневой полости пневмоцилиндра 2 остается прежним.
Подъемник-манипулятор, выполненный по второму варианту (фиг.З), работает аналогично.
Функцию подмембранной камеры 27 датчика обратной связи (фиг.2) в этом случае .выполняет межмембранная камера 43 датчика 16 массы. При изменении давления в пневмоцилиндре 2 изменяется давление в межмембранной камере 43 датчика 16 массы. Прежнее давление в подмембранной камере 44 и межмембранной камере 22 перемещает толкатель 47 в сторону открытия впускного 48 (при повышении давления под поршнем) или впускного 49 (при понижении давления) клапанов.
Фнг.1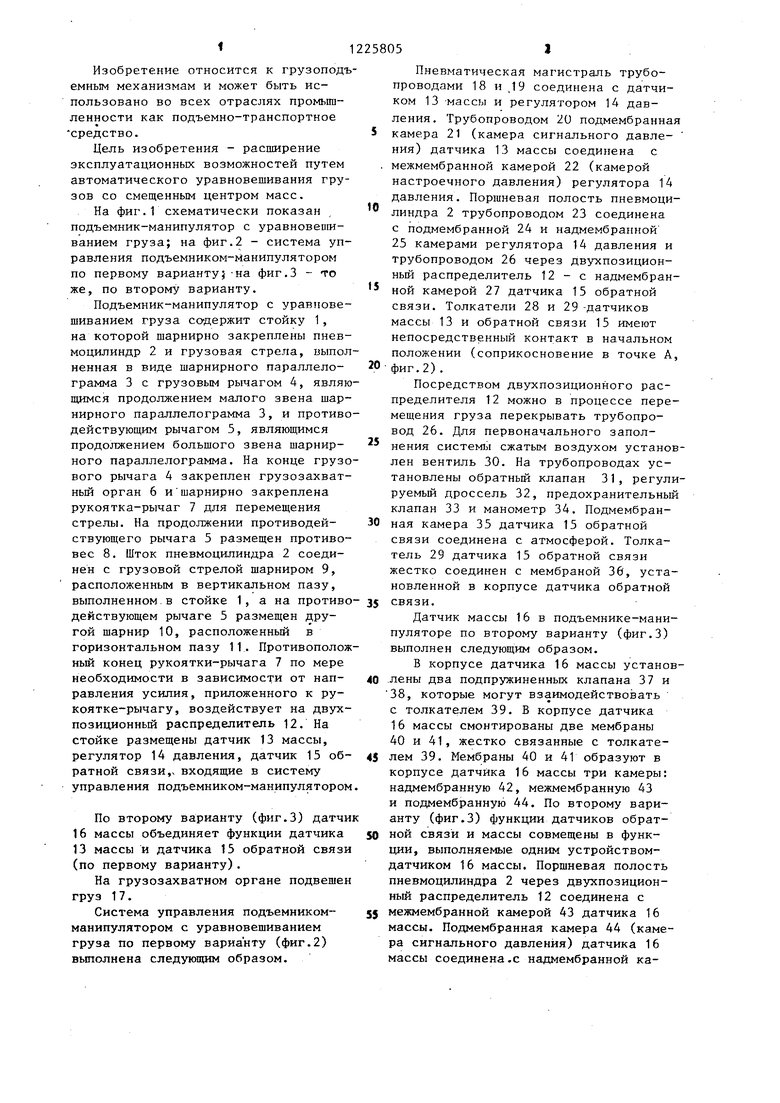


| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Уравновешивающий подъемник | 1977 |
|
SU751787A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |

1. Подъемник-манипулятор с уравновешиванием груза, содержащий стойку, шарнирно соединенную с ней стрелу, выполненную в виде шарнирного параллелограмма с грузовым рычагом, несущим на конце грузозахватный орган, пневмоцилиндр и систему управления с регулятором давления и датчиком массы, имеющим толкатель, о т- личающийся тем, что, с целью расширения эксплуатационных возможностей путем автоматического уравновешивания грузов со смещенным центром масс, система управления снабжена двухпозиционным распределителем и датчиком обратной связи, имеющим размещенную в корпусе мембрану и жестко связанный с ней толкатель, установленный в подмембранной камере с возможностью взаимодействия с толкателем датчика массы, при этом надмембранная камера датчика обратной связи сообщена через двухпози- ционный распределитель соответственно с поршневой полостью пневмоци- линдра и атмосферой, а подмембранная камера с атмосферой. 2. Подъемник -манипулятор с урав- новешивднием груза, содержащий стойку, шарнирно соединенную с ней стрелу, выполненную в виде шарнирного параллелограмма с грузовым рычагом, несущим на конце грузозахватный орган, пневмоцилиндр и систему управ- .ления с регулятором давления и датчиком массы, имеющим толкатель, о т- личающийся тем, что, с целью расширения эксплуатационных возможностей путем автоматического уравновешивания грузов со смещенным центром масс, датчик массы имеет два подпружиненных клапана, установленные в корпусе с возможностью взаимодействия с толкателем, и жестко связанные с последним две мембраны, смонтированные в корпусе с образованием в нем трех камер, при этом над- мембранная и подмембраннай камеры и надклапанная полость датчика массы сообщены между собой, а система управления снабжена двухпозиционным респределителем, через который межмембранная камера датчика массы сообщена соответственно с поршневой полостью пневмоцилиндра и атмосферой. с S (Л ел 00 ел
Фиг.З
Составитель О.Кузьмина Редакторам.Бланар Техред И.Попович Корректор А.Обручар
2025/16
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная 4
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
