Изобретение относится к подъемнотранспортному машиностроению, а именно к устройствам для повьпиения устойчивости самоходных грузоподъемных машин специального назначения, например грузоподъемных машин для монтажа опор линий электропередач высокого напряжения.
Известна грузоподъемная машина, содержащая стрелу, смонтированную посредством оси на ходовой раме, поворотную выносную опору, к которой шарнирно прикреплена тяга, и силовой цилинда поворота опоры t3.
Недостатками известного устройства являются сложность в зксплуатации, а также наличие относительно больших удельных нагрузок.на грунт под опорной плитой выносной опоры.
Цель изобретения - повьш1ение удобства эксплуатации грузоподъемной машины.
Указанная цель достигается тем, что грузоподъемная машина, содержащая стрелу, смонтированную посредством оси на ходовой-раме поворотную выносную опору, к которой шарнирно прикреплена тяга,;и силовой цилиндр поворота опоры, снабжена треугольны- ма кронштейнами, каждай из которых установлен на указанной оси а в стреле выполнено сквозное отверстие, втулками,соединяющими шток силового цилиндра с кронштейнами, и съемным пальцем, вставляемым во втулки и сквозное отверстие стрелы, причем поворотная опора соединена с рамой, а другой конец тяги шарнирно связан с кронштейнами.На фиг. 1 показана грузоподъемная машина в транспортном положении, обший вид; на фйг. 2 - то же, вид сверху; на фиг. 3 - то же, в рабочем положении (при вертикальном подъеме телескопической стрелы) на фиг. 4 разрез А - А на фиг. 3; на 4иг, S разрез Б - Б на.фиг. 3; на фиг. 6 Треугольный кронштейн; на фиг. 7 вид по стрелке В на фиг. 6.
Грузоподъемная машина содержит ходовую раму I, опорную плиту 2, вертикально установленные гидроцилиндры 3 со штоками 4, выполненными с шаровыми головками на конце и установленными в смежных углах жесткой откидной рамы 5, которая другими смежными углами соединена с возможностью поворота относительно горизонтальной оси 6, установленной на хо1089040
довой раме 1. В средней части жесткой откидной рамы 5 шарнирно закреплена тяга 7, которая с помощью пальца 8 шарнирно соединена с одним из углов двух треугольных кронштейнов 9, которые углами соединены с осью 10 крепления секции 11 телескопической стрелы 12 на ходовой раме 1.
Шарнирное соединение жесткой от-: кидной рамы 5, ходовой рамы 1, тя- ги 7 и двух треугольных кронштейнов 9 составляет параллелограммную систему.
Третий угол 13 треугольных кронштейнов 9 выполнен в виде вилки со втулками 14, с которыми соединен шток 15 силового цилиндра 16 поворота опоры, корпус которого соединен с ходовой рамой 1.
В основании секции 11 телескопической стр.елы 12 выполнено сквозное отверстие, в которое при совмещении его со втулками 14 на треугольных кронштейнах 9 вставляется съемный палец 17.
Работа грузоподъемной машины осуществляется следующим образом.
. Так как опорная плита 2 связана посредством об1)азованной параллелограммной системы с секцией 11 телескопической стрелы 12 через съемный палец 17, то при подъеме телескопической стрелы 12 в вертикальное положение опорная плита .2 будет автоматически переходить в рабочее положение . 3) или близкое к нему изS за неровности рельефа местности и затем доводиться до рабочего положения с помощью автономного управления гщфоцилиндрами 3.
При переводе телескопической ст) релы 12 в горизонтальное транспортное положение параллелограммная система, состоящая из шарнирно соединенной с ходовой рамой 1 жесткой откидной рамы 5, тяги 7 и треуголь5 ных кронштейнов 9, будет переводить опорную плиту 2 в транспортное положение..
При подъеме и опускании опорной плиты 2 совместно с подъемом и опус0 канием телескопической стрелы 12 рабочая жидкость гидроцилиндра 16 свободно перетекает через гидрораспределители, расположенные в кабине управления (не показаны). Ь При отсутствии необходимости, одновременного переведения в рабочее положение и обратно опорной плиты 2 и телескопической стрелы 12 вынимают
съемный палец 17. При этом треугольные кронштейны 9 отсоединяются от секции П телескопической стрелы 1. Опорная плита 2 удерживается в этом случае в нужном положении посредством гидроцилиндра 16,
Технико-экономическим преимуществом предлагаемой машины является то,
что одновременно с переводом телескопической стрелы в рабочее положение переводится в рабочее положение опорная плита вьшосной опоры, при этом увеличивается устойчивость грузоподъемной машины, а также улучшаются условия техники Срзопас ности. 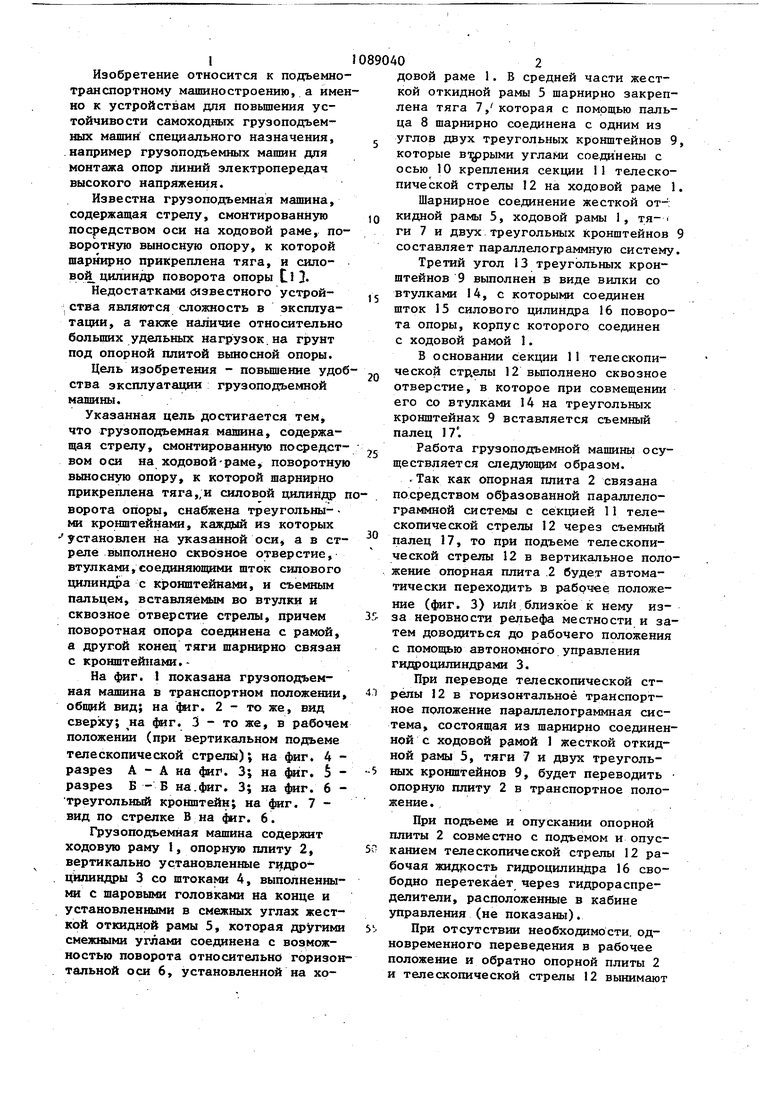

| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Передвижное грузоподъемное устройство | 1982 |
|
SU1102768A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |

ГРУЗОПОДЪЕМНАЯ МАШИНА, содержащая стрелу, смонтированную посредством оси на ходовой раме, поворотную выносную опору, к которой шарнирно прикреплена тяга, и силовой цилиндр поворота опоры, о т л и ч а ю щ а я с я тем, что, с целью повьшения удобства эксплуатации, она снабжена треугольными кронштейнами, каждый из которых установлен на указанной оси, а в стреле выполнено сквозное отверстие, втулками, соединяющими шток силового цилиндра с кронштейнами, и съемным пальцем, вставляемым во втулки и сквозное отверстие стрелы, причем поворотная опора соединена с рамой, а другой конец тяги шарнирно связан, с . кронштейнами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для БУРЕНИЯ СКВАЖИН В ГРУНТЕ | 0 |
|
SU262713A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
