Изобретение относится к геофизическим исследованиям скважин,а именj но к устройствам для простра ственного ориентирования датчиков магнитного поля, и может использоваться в инклинометрах и магнитометрической
.аппаратуре для исследования сверхглубоких нефтяных и газовых скважин
уменьшенных и малых диаметров.
Нанболегё близким к предлагаемому по технической сущности является устройство для ориентирования датчиков магнитного поля, содержащее корпус с двумя основаниями, несущге 1И маятниковый блок, выполненный в виде коаксиально размещенных основной и вспомогательной рамок, первая из которых имеет жестко закрепленный упор и датчик, электрически связанный с корпусом через неразрывные глухие кон-2о такты, маломоментными токоподводами, а вторая - два упора, один из которы жестко соединен с ней и расположен в пазу корпуса, а другой подвижно установлен с возможностью взаимодействия с упором основной рамки СОЦель изобретения - повьшение надежности за счет исключения промежутгггной электрической связи и уменьшения поперечного габарита. Указанная цель достигается тем, что устройство дпя ориентирования да чиков магнитного поля, содержащее корпус с двумя основаниями, несущими моментный блок, выполненный в виде коаксиально размещенных основной и вспомогательной рамок, первая из которых имеет жестко закрепленный упор и датчик, электрически связанный с о корпусом через неразрывные глухие контакты маломоментными токоподводам а вторая - два упора, один из которы жестко соединен с ней и расположен в пазу корпуса, а другой подвижно тановлен с возможностью взаимодейс ,вия с упором основной рамки, которая смонтирована на основаниях, а вспомогательная - на одном из них, при этом подвижный упор последней распоJfoжeн на внешней ее поверхности, при чем основание общее для обеих рамок выполнено в виде кронштейна, введенного во внутреннюю полость вспомогательной рамки через боковую поверхность, имею1цую окно. Неподвижный упор вспомогательной рамки выполнен с последней за одно целое с возможностью взаимодействия
с боковыми поверхностями кронштейна.
Вспомогательная рамка выполнена в виде дебаланса П-образного профиля, средняя часть которого имеет в сечении вид кольцевого сектора с боковыми поверхностями, имеющими возможность полного контактирования с встречными боковыми поверхностями.
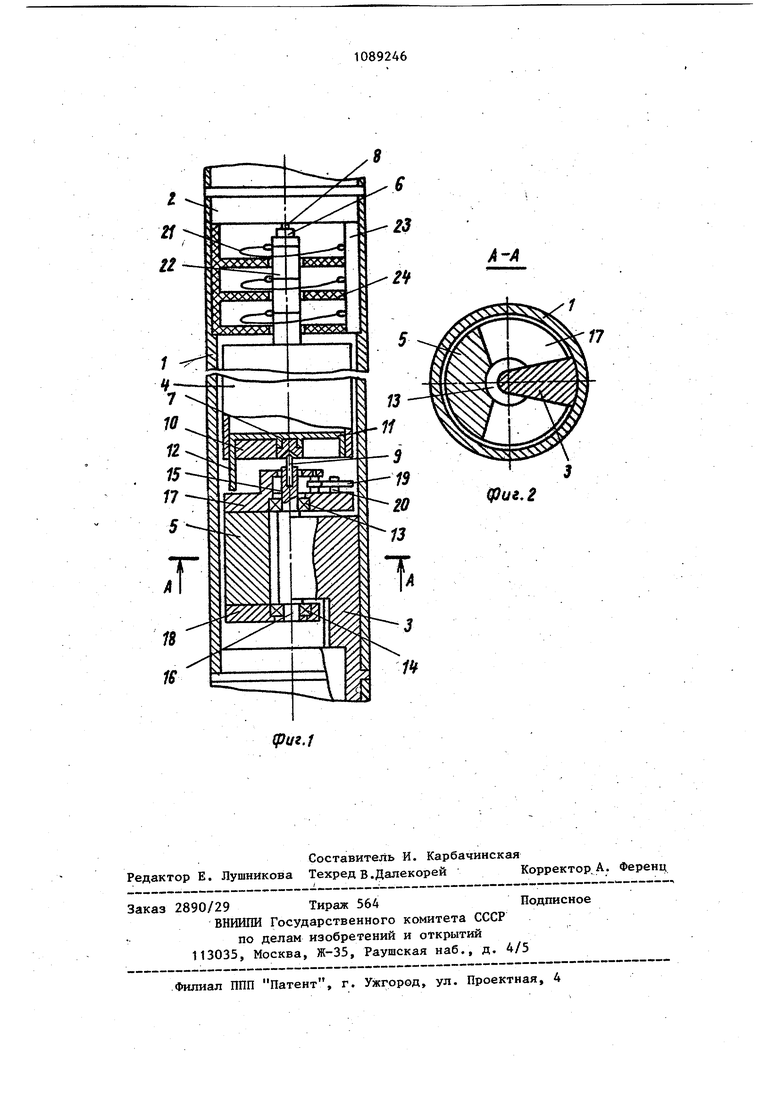
На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 разрез А-А на фиг. 1-.
Устройство содержит корпус, включающий в себя полый цилиндр 1 и жестко присоединенные к иену верхнее 2 и нижнее 3 основания. Внутри корпуса размещен маятниковый блок, состоящий из двух рамок, одна из которых по функциональному назначению является основной 4, а другая - вспомоГательной 5. Основная рамка 4 с помощью жестко связанных с ней опор 6 и 7 вращения установлена на кернах 8 и 9, жестко закрепленных в телах верхнего и нижнего оснований 2 и 3, и несет размещенный в ней датчик магнитного поля (не показан) с возможностью ориентации его относительно плоскости искривления скважины с помощью эксцентричного груза 10. При этом груз 10 жестко соединен с основанием 11 основной рамки 4. Причем основание 11 снабжено упором 12, имеющим вид консольно закрепленного стержня, обращенного в зону вспомогательной рамки 5 и размещенного в плоскости, проведенной через ось вращения основной рамки 4 и центр тяжести груза 10. Упор 12 предназначен для механического взаимодействия с вспомогательной рамкой 5, которая размещена соосно с основной рамкой 4, имеет равный с ней наружный диаметр и посредством опор вращения 13 и 14 установлен на нижнем основании 3 корпуса. При этом нижнее основание 3, являющееся общим для размещения опор 7 и 13 вращения обеих рамок, может иметь различную конструктивную форму исполнения, однако для достижения наивысшей жесткости конструкции и обеспечения максимальной плотности ее компоновки, оно выполнено в виде кронштейна с двумя противоположно направленными полуосями 15 и 16, служащими для размещения опор 13 и 14 вращения вспомогательной рамки 5, которая снабжена окном, охватывающим упомянутый кронштейн. Благодаря этому тело вспомогательной рамки 5 реализует функцию ее неподвижного упора, пазом для которого служит полость, образованная внутренней поверхностью полого цилиндра 1 и боковыми поверхностями основания-кронштейна 3. Кроме того, такая конструкция обеспечивает свободный выход одной из полуосей основания-кронштейна 3 в зону основной рамки 4, что позволяет ее опору вращения 7 с помощью кер на 9 разместить на торцовой поверхности полуоси 15. При этом опоры 13-14 вращения выполнены в виде шари ковых подшипников, установленных в основаниях 17 и 18 вспомогательной :рамки 5. Причем для повышения эффективности самоориентации маятникового блока, заключающейся, прежде всего, в уменьшении зоны нечувствительности вспомогательной рамки 5 при воздейст ВИИ на нее опрокидывающего (вращающе го) момента, упомянутая рамка выполнена в виде дебаланса П-образного профиля, средняя часть которого служит эксцентричным грузом по массе в несколько раз превосходящей массу груза 10, а периферийными частями его являются основания 17 и 18. Причем, для получения наибольшего враща щего момента путем максимального использования полезного объема полос ти паза, размещенная в последнем сре няя часть дебаланса выполнена в виде кольцевого сектора (фиг. 2), боковые поверхности которого выполнены под углом, обеспечивающим возможность их полного контактирования с встречными боковыми поверхностями основаниякронштейна 3. При этом основаниекроноггейн 3 в поперечном сечении может иметь вид сектора. Для обеспечения возможности взаимодействия вспомогательной рамки 5 с упором 12 основной рамки 4 основание 17 на внешней своей поверхности имеет установленный на кернах подвижный упор 19, ограниченный во.вращении двумя штыря ми 20. При этом вспомогательная рамка 5 с помощью бортов паза корпуса (боковых поверхностей кронштейна) ограничена во вращении на угол 190koti360, а основная рамка 4, благодаря возможности взаимодействия ее упора 12 с подвижным упором 19 вспомогательной рамки 5, имеет свободу вращения относительно последней на угол . При этом размещенный в основной рамке 4, датчик электрически связан с корпусом маломоментными токоподводами 21 через неразрывные глухие, например, сварные контакты, установленные на соответствующих изоляторах 22 и 23 основной рамки 4 корпуса. Причем для устранения возможности взаимного замыкания тркоподводы 21 разделены друг от друга полками 24, вьшолненными из электроизоляционного материала с хорошими антифрикционными свойствами, например, фторопласта, и установленными в полом цилиндре 1 корпуса. Токоподводы 21 могут иметь различную конструкцию и форму поперечного сечения, позволяющие обеспечивать передачу требуемой электрической мощности при свободном вращении рамок 4 и 5 в заданных для них пределах угловых величин. Устройство работает следующим образом. Исходным состоянием устройства является то, которое изображено на фиг. 1 при отклонении корпуса в плоскости чертежа влево от вертикали на угол (обычно 3-5), достаточный для появления моментов вращения, . способных обеспечить ориентирование маятникового блока с требуемой точностью, устройство не изменяет своего состояния. При вращении корпуса, например, по часовой стрелке . (вид сверху) маятниковый блок будет сохранять свое поло-жение в плоскости ориентации до тех пор, пока тело вспомогательной рамки 5 (груз дебаланса) не войдет в контакт с боковой поверхностью основания-кронштейна 3. После этого способность к сохранению исходного пространственного положения будет иметь лишь основная рамка 4. Вспомогательная же рамка 5, увлекаемая основанием-кронштейном 3, будет совершать вращательное движение совместно с корпусом. Этот процесс будет продолжаться до тех пор, пока центр тяжести груза вспомогательной рамки 5 не достигнет своей верхней критической точки, лежащей в плоскости отклонения корпуса. В этот момент упор 12 основной рамки 4 войдет в контакт с подвижньм упором 19 и будет отклонять его, обеспечивая тем самым упомянутой рамке неизменное положение при вращении.
корпуса еще на 5-10, т.е. до тех пор, пока вспомогательная рамка 5 не приобретет вращакщий момент, достаточный для ее опрокидывания. После этого вспомогательная рамка 5, выйдя из соприкосновения с боковой поверхностью основания-кронштейна 3, под действием опрокидывающего ее момента начнет совершать угловое перемещение в направлении, совпадающим с направлением вращения корпуса. При этом ее подвижный упор 19, войдя в контакт с одним из штырей 20 и взаимодействуя с упором 12, будет вращать основную рамку 4 в том же направлении. Благодаря возникающей при таком вращении маятникового блока инерционной силе вспомогательная рамка 5 пройдет свою нижнкяо критическую точку (точку равновесия) и достигнет соприкосновения с другой боковой поверхностью основания-кронштейна 3. При этом основная рамка 4 после прохождения центра тяжести ее груза 10 через верхнюю критическую точку совершит самостоятельное вращательное движение в направлении, совпадающем с направлением вращения корпуса. В результате этого упор 12
выйдет из соприкосновения с подвижным упором 19, а основная 4 и вспомогательная 5 рамки после совершений затухакицих колебательных движений займут исходное состояние. Причем, в период вращения основной рамки 4 до ее опрокидывания токоподводы 21 будут закручиваться, а после опрокидывания - раскручиваться. При, этом минимальный угол закручивания-раскручивания токоподводов 21 может составить 280-285°. Работа устройства при вращении корпуса в противоположнсш направлении ничем не отличается от происходящих процессов, описанных вьше.
Использование предлагаемого устройства в скважинных геофизических приборах позволит повысить их надежность и термостойкость, а также уменьшить наружный диаметр охранного кожуха, что имеет важное значение при исследовании сверхглубоких скважин уменьшенного и малого диаметра и для проведения работ на осложненных участках скважин, в колонне, состоящей, например, из легкосплавных бурильных труб.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования датчиков магнитного поля | 1973 |
|
SU474605A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| Устройство для ориентирования преобразователей в скважине | 1978 |
|
SU732513A1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабелем | 1984 |
|
SU1182158A1 |
| Устройство для ориентирования датчиков в скважине | 1983 |
|
SU1137190A1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
1. УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ, содержащее корпус с двумя основаниями, несущими маятниковь1й блок, выполненный в виде коаксиально размещенных основной и вспомогательной рамок, первая из которых имеет жестко закрепленный упор и датчик, электрически связанный с корпусом через неразрывные глухие контакты маломоментны- ми токоподводами, а вторая - два упора, один из которых жестко соединен с ней и расположен в пазу корпуса, а другой подвижно установлен с возможностью взаимодействия с упором основной рамки, отличающееся тем, что, с целью повьииеиия надежности за счет исключения промежуточной электрической связи уменьшения поперечного габарита, основ1ная рамка смонтирована на основаниях, а вспомогательная - на одном из них, при этом подвижный упор последней расположен на-внешней ее поверхности, причем основание, общее для обеих рамок, выполнено в ввде кронштейна, введенного во внутреннюю полость вспомогательной рамки через боковую поверхность, именицую окно. 2.Устройство по п.1, о т л и ча ю ще е с я тем, что неподвижный упор вспомогательной рамки вы(Л С полнен с последней за одно целое с возможностью взаимодействия с боковыми поверхностями кронштейна. 3.Устройство по п.2, от л и- . ча ю щ ее с я тем, что вспомогательная рамка вьтолнена в виде дебаланса П-образного профиля, средняя часть которого имеет в сечении вид кольцевого сектора с боковыми поверхностями, имеющими возможностьполного контактирования с встрёчньми бокоtsD выми поверхностями кронштейна. 4 а
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для ориентирования датчиков магнитного поля | 1973 |
|
SU474605A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
