(1
Изобретение относится к геофизическим исследованиям скважин, а именно к устройствам для пространственного ориентирования датчиков магнитного поля относительно плоскости искривления скважины и может использоваться в инклинометрах и магнитометрической аппаратуре для исследования сверхглубоких наклонных скважин.
Известное устройство для ориентирования датчиков магнитного поля, содержащее корпус, расположенный в нем маятниковый блок, выполненный в виде двух коаксиальных рамок, внутренняя из которых снабжена упором и датчиком, электрически связанным маломо ментными токоотводами, взаимодействующими через жесткие контакты с корпусами внутренней и внещней рамок, не обеспечивает достаточной надежности в работе в условиях сверхглубоких скважин.
Цель изобретения - повысить надежность работы устройства в условиях сверхглубоких скважин.
Для этого внещняя рамка снабжена двумя упорами, один из которых жестко связан с ней и расположен в пазу корпуса, а другой - установлен подвижно на основании внещней рамки и взаимодействует с упором внутренней рамки.
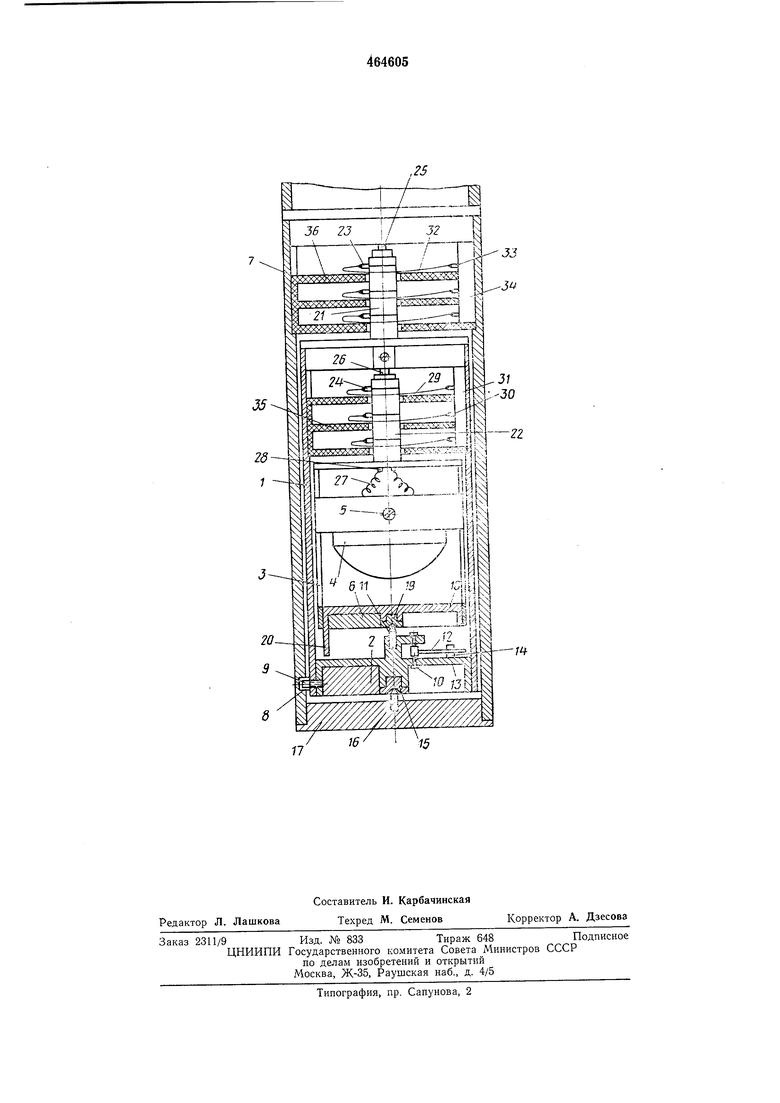
На чертеже изображена принципиальная схема предлагаемого устройства.
Оно содержит внещнюю I, несущую эксцентричный груз 2 и внутреннюю рамку 3, несущую датчик 4, подвещенный на кернах 5, и эксцентричный груз 6. Причем груз 2 по массе превосходит груз 6. В корпусе 7 имеется ограничитель в виде паза 8, в который входит упор 9, жестко связанный с внещней рамкой 1. Этот упор ограничивает свободу вращения рамки I относительно корпуса 7 в зависимости от длины паза 8, на угол 190°: а 360°.
В основании 10 внещней рамки 1 вмонтированы керн 11, подвижный упор 12 на кернах 13, ограничительные щтыри 14 и опора 15, установленная на керне 16 основания 17 корнуса 7. Основание 18 внутренней рамки 3 содержит опору 19, установленную на керне II и упор 20, который предназначен для взаимодействия с подвижным упором 12, обеспечивающим внутренней рамке 3 свободу вращения
относительно внешней рамки 1 на угол ЗбО° .
Внещняя 1 и внутренняя 3 рамки снабжены соответственно изоляторами 21 и 22 с жесткими контактами 23 и 24, установленными
на полуосях 25 и 26.
Датчик 4 при помощи токоотводов 27 соединен через жесткие контакты 28 с контактами 24, к которым припаяны маломоментные токоотводы 29, соединенные через жесткие
контакты 30 изоляционной платы 31 с контактаМИ 23, к которым в свою очередь припаяны маломоментные токоотводы 32, соединенные через жесткие контакты 33 изоляционной платы 34 с жилами кабеля (на чертеже не показаны).
Маломоментные токоотводы 29 и 32 расположены на полках 35 и 36, выполненных из фторпласта, и имеют длину, обеспечивающую свободное вращательное движение коаксиальных рамок 1 и 3 в заданных пределах, причем в качестве маломоментных токоотводов 29 и 32 используются проводники круглого сечения, например, диаметром 0,05 мм.
При вращении корпуса 7 от О до 360°, положение рамок 1 и 3 относительно плоскости искривления скважины сохраняется до тех пор, пока упор 9 внешней рамки 1 не дойдет до края паза 8 (маломоментные токоотводьг 32 закручиваются). Затем способность ориентации в плоскости искривления скважины сохраняет лишь внутренняя рамка 3 с датчиком 4, а внешняя рамка 1 совершает вращательное движение совместно с корпусом 7 (маломоментные токоотводы 29 закручиваются) до тех пор, пока упор 9 не пройдет свою верхнюю точку, расположенную в плоскости искривления скважины. Так как внешняя рамка 1 имеет эксцентричный груз 2, по массе превосходящий груз 6 внутренней рамки 3, то возникает момент вращения, опрокидывающий внещнюю рамку 1 (маломоментпые токоотводы 32 раскручиваются), которая совершает вращательное движение в направлении, совпадающим с направлением вращения корпуса 7 до тех пор, пока упор 9 не дойдет до другого края паза. 8. При этом основание 10 внещней рамки 1 при помощи подвижного упора 12, заключенного между двумя ограничительными штырями 14, действуя на упор 20 внутренней рамки 3, врашает ее до тех пор, пока упор 20 не пройдет свою верхнюю точку, расположеную в плоскости искривления скважины.
Затем под действием эксцентричного груза 6 рамка 3 самостоятельно ориентируется совместно с датчиком 4 в плоскости искривления скважины (маломоментные токоотводы 29 раскручиваются).
В результате маятниковый блок занимает исходное состояние. Подвижный упор 12 предназначен для того, чтобы обеспечить свободное ориентирование внутренней рамки 3 с датчиком 4 во время нахождения упора 9 внешней рамки 1 (за счет трения в опорах), когда возникающий момент вращения недостаточен для ее опрокидывания и соверщения вращательного движения, которое может иметь место при углах наклона устройства, близких к вертикали.
Предмет изобрете ния
Устройство для ориентирования датчиков магнитного поля, содержащее корпус, расположенный в нем магнитный блок, выполненный в виде двух коаксиальных рамок, внутренняя из которых снабжена упором и датчиком наклона, электрически связанным маломоментными токоотводами, взаимодействующими через жесткие контакты с корпусами внешней и внутренней рамок, отличающеес я тем, что, с целью повыщения надежности работы в условиях сверхглубоких скважин, внешняя рамка снабжена двумя упорами, один из которых расположен в пазу корпуса и жестко связан с ним, а другой - установлен подвижно на основании внешней рамки и взаимодействует с упором внутренней рамки.
TSTsTSvJTJr xiU: 7 -г- -I-С, i Л ;
:РТЧ 11 kl f7-- KiJl
/ 1 ijHl:
-Z2
5-
611 3 /Jjilp
ШЙггггМШ
-/

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| Устройство для ориентирования датчиков магнитного поля | 1982 |
|
SU1089246A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Устройство для ориентирования датчиков | 1986 |
|
SU1343006A1 |
| Устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабелем | 1984 |
|
SU1182158A1 |
| Устройство для ориентирования преобразователей в скважине | 1978 |
|
SU732513A1 |
| Устройство для ориентирования датчиков в скважине | 1983 |
|
SU1137190A1 |