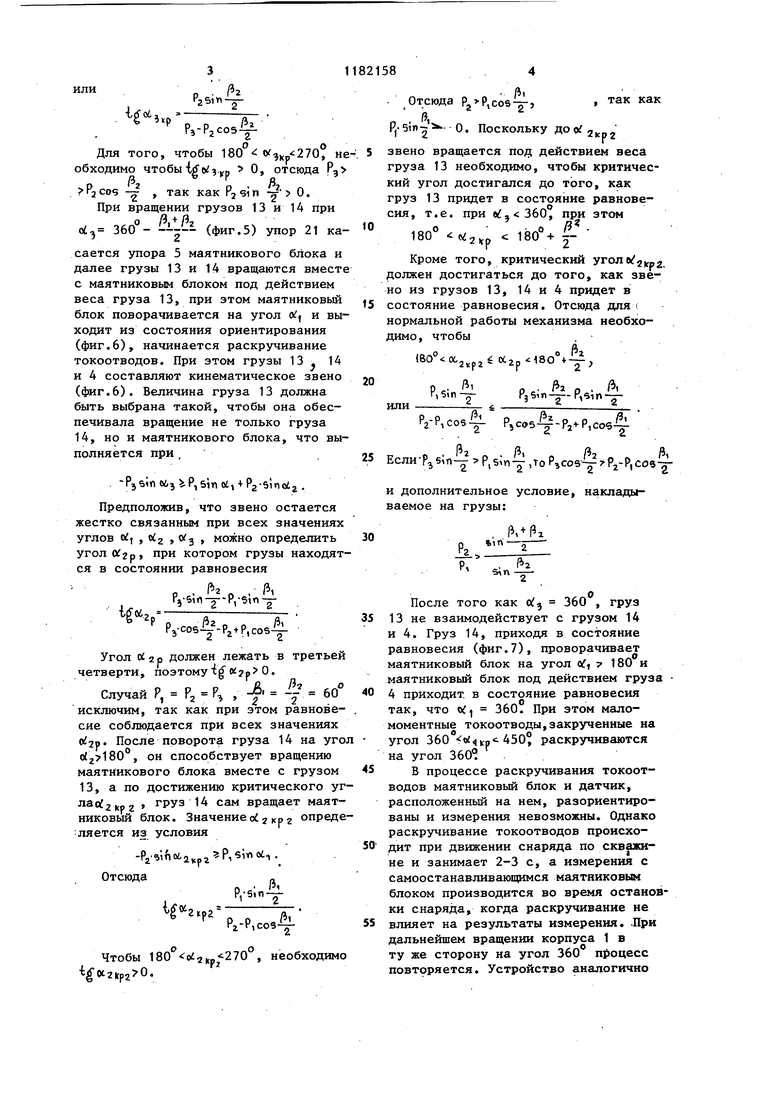
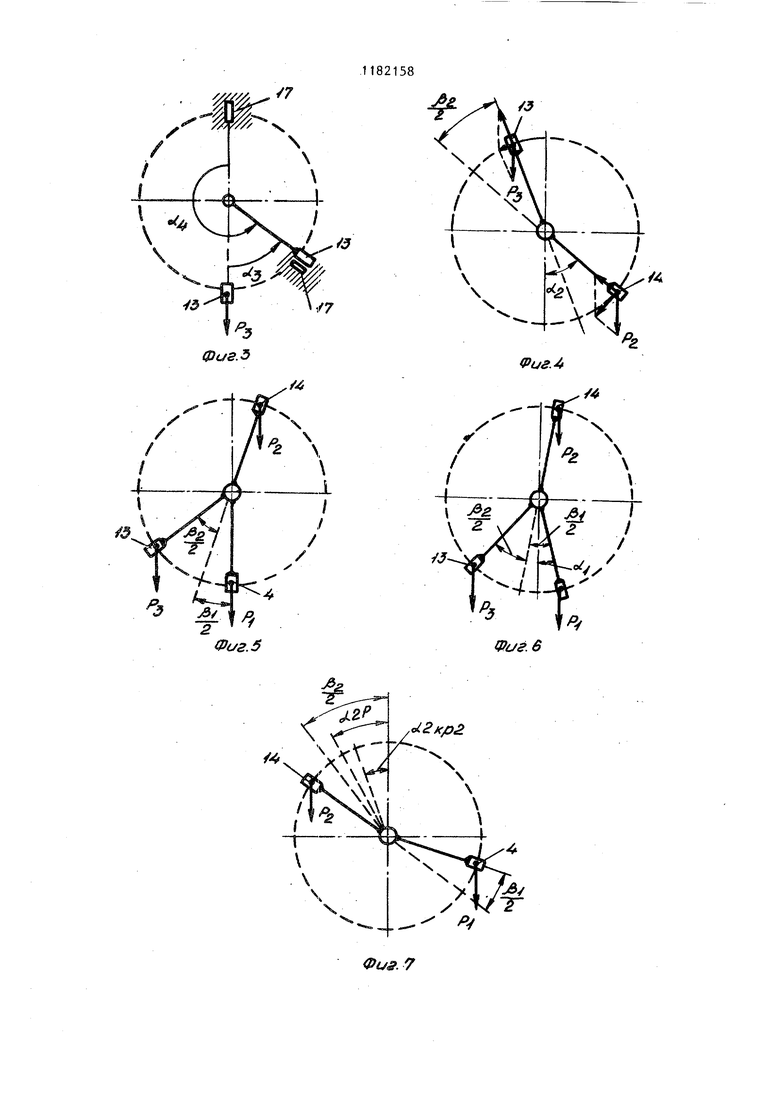
1 Изобретение относится к элементам устройств для исследования буровых скважин и может быть использо вано в устройствах ориентирования датчиков (преимущественно зенитного угла), устанавливаемых в скважинных снарядах геофизических приборов и содержащих маятниковый блок,. Цель изобретения - повышение надежности работы устройства за счет ограничения закручивания токоотвоНа фиг. 1 приведено устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабе лем а также сечения А-А, Б-Б и В-В; на фиг.2 - эксцентричный груз двух проекциях; на фиг.З - кинемати ческая схема звена из упора и эксцентричного груза; на фиг,4 - кинематическая схема звена из эксцентричных грузов; на фиг.5 и 6 - кинематические схемы звена из эксцентри ных грузов и эксцентричного груза м ятникового блока; на фиг.7 - кинематическая схема звена из эксцентричного груза и эксцентричного груза маятникового блока. Устройство содержит корпус 1, маятниковый блок 2 с датчиком 3, эксцентричным грузом 4, упором 5, . осью 6, изолированными клеммами 7 на оси, проводниками 8 и связывающим датчиком с маломоментньпуги спиральными токоотводами 9. В корпус 1 .прибора вмонтирована опора 10 керна 11 оси 6 маятникового блока, ось 12 эксцентричного груза 13 и эксцентри ного груза 14 с опорой 15 керна 1& оси 6 маятникового блока, упор 17 и жесткие клеммы 18, изолированные от корпуса, Маломоментные спиральные тркоотводы 9 обеспечивают связь да чика 3 на маятниковом блоке с каротажным кабелем 19, жилы которого ра паиваются на клеммы 18. Эксцентричные грузы 13 и 14 вращаются на вмонтированных в них подшипниках 20 вокруг оси 1. Упор 5 и 17, а также 21 - 24, вмонтированные в эксцентрич ные грузы, обеспечивают необходимую последовательность взаимодействия эксцентричных грузов маятникового блока, ограничивают возможное вращение маятникового блока относительно корпуса прибора. На фиг. 2 изображен эксцентричный груз 13 с указанием параметров, не82обходимых для анализа работы механизма, где -2 - угловой размер упора. 23; R - расстояние от оси вращения до центра упора; (з расстояние от оси вращения до центра массы; Р сила веса, приложенная к центру С массы эксцентричного груза. Эксцентричный груз 14 выполнен аналогично и имеет угловой размер упора 21 равным Д , к центру массы приложения силы веса Pg , расстояние от оси до упоров также равно R . На фиг.З - 7 используются следующие обозначения угол вращения маятникового блока; w;2 угол вращения груза 14; oi-)- угол вращения груза 13; угол вращения корпуса устройства. (За исходное состояние принято положение грузов и корпуса снаряда, фиг.1). PI - вес эксцентричного груза 14 маятникового блока; г 2 - зес эксцентричного груза 14; РЗ - вес эксцентричного груза 13. На фиг. 3-7 расстояния от центров масс грузов 13 и 14 и груза 4 маятникового блока до оси устройства взяты одинаковыми с целью упрощения анализа работы механизма. Рассмотрим работу устройства при горизонтальном расположении его корпуса. При продвижении по скважине корпус 1 устройства может поворачиваться вокруг своей оси О - 360. При вращении корпуса 1 из исходного положения на уголо ; 5 180° против часовой стрелки (фиг.З) упоры 17 и 24 Соприкасаются и далее корпус 1 вращается вместе с Грузом 13. При oi 360°- - (:i, -) соприкасаются упоры 22 и 23, эксцентричные грузы 13 и 14 вращаются вместе (фиг.4).При этом маятниковый блок 2 остается в ориентированном положении, а Маломоментные токоотводы закручиваются на угол oi При ( 180 ) углы достигают критических значений ( ) грузы 13 и 14 вращаются против часовой стрелки под действием веса, груза 13, независимо от вращения корпуса 1. Это наступает при -P sinot 5 РЗ г P -P cosii Для того, чтобы ( н обходимо чтобы igtyi rp О, отсюда РЗ РЗ С09 - , так как Pj ei п -j . При вращении грузов 13 и 14 при (фиг.5) упор 21 каoi 360 сается упора 5 маятникового блока и далее грузы 13 и 14 вращаются вместе с маятниковым блоком под действием веса груза 13, при этом маятниковый блок поворачивается на угол oi и выходит из состояния ориентирования (фиг.6), начинается раскручивание токоотводов. При этом грузы 13 . 14 и 4 составляют кинематическое звено (фиг.6). Величина груза 13 должна быть выбрана такой, чтобы она обеспечивала вращение не только груза 14, но и маятникового блока, что выполняется при , -PjSin Oij P,5in Oi, + Pj-Sinoij . Предположив, что звено остается жестко связанным при всех значениях углов t з можно определить уголЛгр при котором грузы находят в состоянии равновесия P5-5in-2--P,-5in-2 Р,-соб4-Р,.Р,сов4Угол и 2 р должен лежать в третьей четверти, поэтому О. Случай Р, Рг Р- , -j -/ бо исключим, так как при этом равновесие соблюдается при всех значениях После поворота груза 14 на уго , он способствует вращению маятникового блока вместе с грузом 13, а по достижению критического уг груз 14 сам вращает маятниковый блок. Значение od 2 кр 2 опреде ляется из условия -P.i-5lfloi.,«i«eii Отсюда P,-sin-|Рг-Р,сов4 Чтобы 180 , необходимо tgOC2lfp2 0« Отсюда р p cos-5, так как P|-5in-j - 0. Поскольку до of .. - 2 « .-«.irf J -ч 2 k звено вращается действием веса груза 13 необходимо, чтобы критический угол достигался до того, как груз 13 придет в состояние равновесия, т.е. при в,360, при зтом о , . .х.о /3«. 180 Я 2,р с 180 -ь Кроме того, критический уголв 2,,„2 должен достигаться до того, как звено из грузов 13, 14 и 4 придет в состояние равновесия. Отсюда для ( нормальной работы механизма необходимо, чтобы. ( о. гр-180%, 2v:p2 P.Sin Р с D РЗ - Рг-Р, р,,.Р,соб Если-Р б п- р,5;лу,тоР,сов-у Рг-Р,сов и дополнительное условие. накладываемое на грузы: , +Рг ЯПт После того как - РУЗ 13 не взаимодействует с грузом 14 и 4. Груз 14, приходя в состояние равновесия (фиг.7), проворачивает маятниковый блок на угол о, 180 и маятниковый блок под действием груза 4 приходит, в состояние равновесия что 360. При этом малотак. токоотводы,закрученные на моментные ,о угол 450 раскручиваются на угол 360 В процессе раскручивания токоотводов маятниковый блок и датчик, расположенный на нем, разориентиро- ваны и измерения невозможны. Однако раскручивание токоотводов происходит при движении снаряда по скважине и занимает 2-3 с, а измерения с самоостанавливающимся маятниковым блоком производится во время остановки снаряда, когда раскручивание не влияет на результаты измерения. .При дальнейшем вращении корпуса 1 в ту же сторону на угол 360 процесс повторяется. Устройство аналогично
работает при вращении корпуса по часовой стрелке. На углы /, и /З наложено ограничение i-i -н 13- 360 которое необходимо для того, чтобы упор 21 груза 14 не касался упора 5 маятникового блока до тех.пор, пока грузы 13 и 14 не достигнут критического угла и не начнется их вращение под действием веса груза 13, При соблюдении данного условия маятниковый блок находится в состоянии ориентирования все время, за исключением времени раскручивания его грузами 13 и 14.
Положение упоров 17 и 24; 22 и 23; 5 и 21 может быть иным, т.е. упоры взаимно соприкасающиеся при вращении корпуса могут занимать различные положения относительно оси снаряда, оставаясь разнесенными друг от друга на 180 относительно оси в исходном положении корпуса. Перестановка упоров не изменяет принципа работы устройства. В случае использования грузов 4, 14 и 13 с разньми расстояниями от оси устройства до центров масс во всех приведенных соотношениях необходимо умнояшть TI г ъ н расстояния от оси до центра масс, при этом соотношения не изменятся. При отклонении оси корпуса 1 от горизонтали, силы, приводящие маятниковый блок и эксцентричные грузы в состоянии равновесия, уменьшаются пропорционально косинусу угла отклонения от горизонтали, а при отклонении на 86-88 сила, приводящая в состояние равновесия, равна 0,04-0,06 от силы, действующей при горизонтальном положении корпуса снаряда. Для нормальной работы устройства необходимо величины грузов 4, 13 и 14 и углы ,, 3 выбирать так чтобы силы, приводящие грузы в соетояние равновесия, могли преодолеть силы трения в подшипниках грузов и установить маятниковый блок в состояние ориентирования. При строго вертикальном положении корпуса грузы и маятниковый блок разориентированы, однако датчик маятникового блока (имеется в виду отвес для измерений зенитного угла) принимает вертикальное положение независимо от ориентации маятникового блока. Установка зксцентричных грузов ограничивает закручивание маломоментных токоотводов, создается возможность соединить маломоментными токоотводами датчик с каротажным кабелем и обеспечить их бесконтактную связь.
Предлагаемое устройство обеспечивает бесконтактную связь датчика с каротажнь1м кабелем, что устраняет влияние на результаты измерений непостоянства сопротивления контакта, например при окислении или загрязнении поверхности коллектора, не содержит устройств, прижимающих щетки к коллектору, и не потребляет электроэнергию для прижатия щеток.
Кроме того, устройство обеспечивает бесконтактную связь датчика на маятниковом блоке с каротажным кабелем, через маломоментные токоотводы, угол закручивания которых при движении снаряда по скважине ограничен угломс« 4кр что обеспечивает повьшени надежности работы устройства.
Наиболее эффективно устройство может быть использовано при изготовлении переносных инклинометров для измерения параметров эксплуатационных и разведочных скважин небольшой длины, когда необходимыми условиями являются надежность, простота, малый вес и малое потребление энергии. j,y. X5 6 -Н ////// //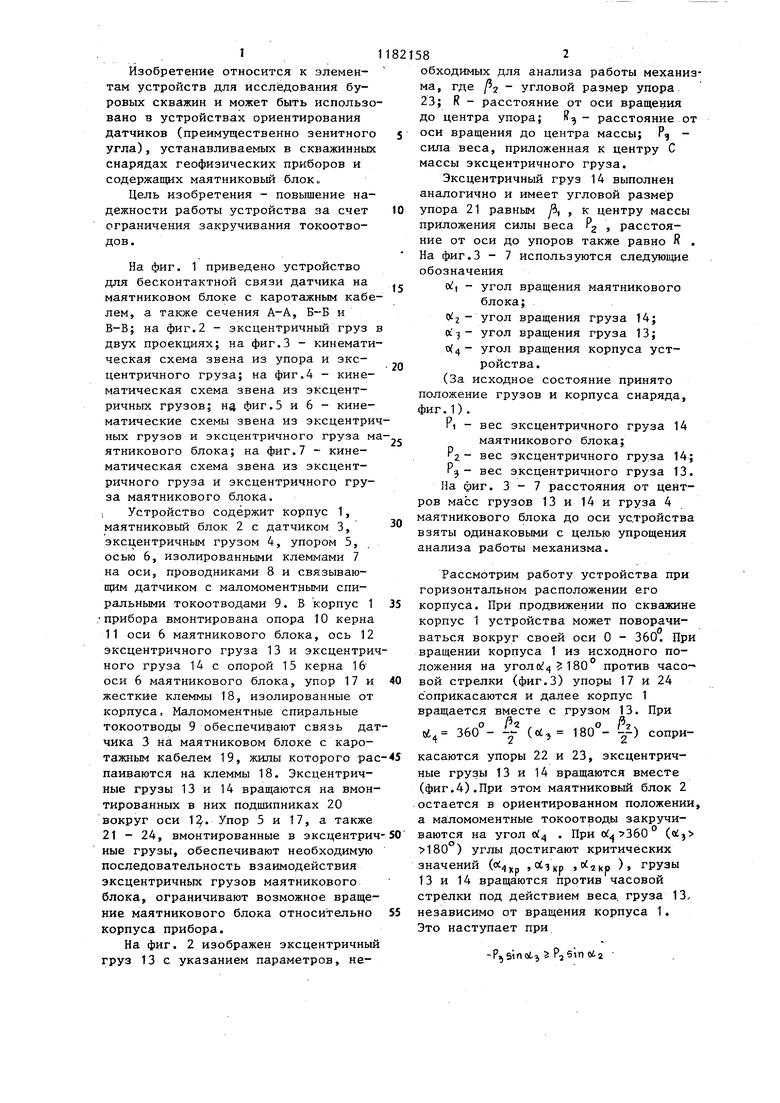
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования датчиков магнитного поля | 1973 |
|
SU474605A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
| Устройство для ориентирования датчиков магнитного поля | 1982 |
|
SU1089246A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования датчиков | 1986 |
|
SU1343006A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| МАЛОГАБАРИТНЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2178523C2 |
| Инклинометр | 1982 |
|
SU1082939A1 |
УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ СВЯЗИ ДАТЧИКА НА МАЯТНИКОВОМ БЛОКЕ С КАРОТАЖНЫМ КАБЕЛЕМ, содержащее корпус, внутри которого на центральной оси последовательно установлены маламоментные спиральные токоотводы и самоостанавливающийся маятниковый блок с датчиком, о т л и ч а ю щ ее с я тем, что, с целью повышения надежности работы за счет ограничения закручивания токоотводов, оно снабжено двумя эксцентричными грузами, размещенными на стержне, один конец KOTopioro подвижно соединен с осью маятникового блока, а другой закреплен в корпусе, причем эксцентричные грузы установлены с возможностью поворота один относительно другого и с возможностью периодического поворота маятникового, блока в сторону (О вращения корпуса.
/7
2
2
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КОМПЛЕКСА ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ И НАПРАВЛЕНИЯ ОТКЛОНИТЕЛЯ | 0 |
|
SU285860A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 0 |
|
SU234282A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
