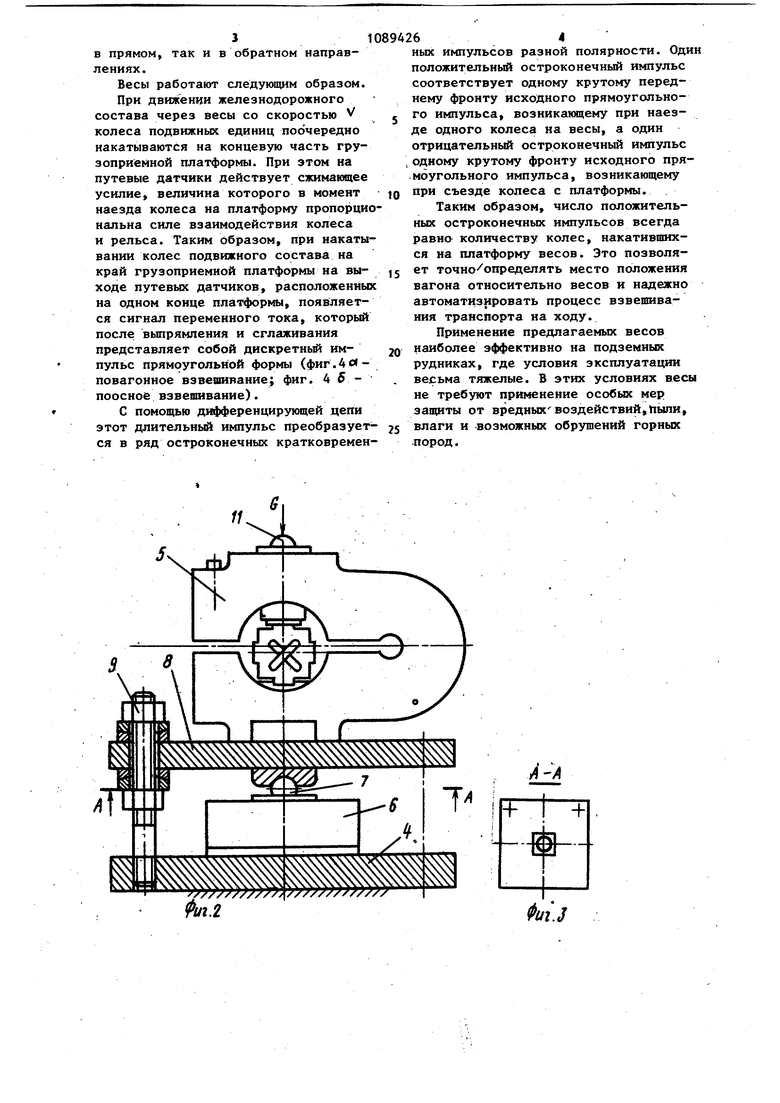
Изобретение относится к весоизме рительной технике и может найти при менение при взвешивании колесного подвижного состава на ходу. Известны магнитоупругие весы, предназначенные для взвешивания четырехосных вагонов узкой колеи на ходу С 1 3. Недостатком устройства является то, что путевой датчик располагается между рельсами. Наиболее близким по технической сущности к изобретению является уст ройство, содержащее путевые датчики, грузоприемную платформу, опирающуюся на магиитоупругие весовые датчики через силопередающие самоустанавливающиеся опоры, каждьй из которых установлен на промежуточной жесткой плите, снабженной центральным сферическим шарниром и установочными винтами, расположенными на фундаментальной плите L2 3, Недостатком известного устройства является ненадежность работы путевых датчиков из-за обрушивания горных пород в шахте. Цель изобретения - повьщ1ение надежности работы весов за .счет исключения ложных сигналов обрушивших ся горных пород. Поставленная цель достигается тем, что в электромеханических плат форменных весах, содержащих путевые датчики, грузоприемную платформу, опирающуюся на магнитоупругие весовые датчики через силопередающие самоустанавливающиеся опоры, каждый из которых установлен на промежуточ ной жесткой плите, снабженной центральным сферическим шарниром и уста новочными винтами, расположенными на фундаментной плите, путевые дат7 чики установлены на фундаментной плите под промежуточной жесткой пли той и взаимодействуют с ней через силовоспринимающий центральный сферический шарнир, причем вертикальная нагрузочная ось магнитоупругого весового датчика совпадает с осью путевого датчика. На фиг, 1 изображен грузоприемны узел электромеханических платформен ных весов, общий вид; на фиг, 2 опорное устройство весов, общий вид; на фиг.. 3 - разрез А-А на фиг. на фиг, 4 - временные диаграммы электрического сигнала путевого маг нитоупругого датчика и первой производной этого сигнала, снимаемой в виде импульса через дифференцирующую цепочку при повагонном и поосном методах взвешивания движущегося транспортного средства. Электромеханические платформенные весы состоят из грузоприемной платформы 1 с рельсами 2, примыкающими к рельсам железнодорожной колеи, бетонного фундамента 3, фундаментной плиты 4, неподвижно закрепленной на фундаменте, магнитоупругих весовых датчиков 5 и путевых датчиков 6, Путевой датчик, например магнитоупругий преобразователь механических усилий в электрический сигнал, неподвижно установлен на фундаментной плите и через силовоспринимакиций центральньй сферический шарнир 7 взаимодействует с жесткой промежуточной плитой 8, снабженной двумя боковыми установочными винтами 9, Магнитоупругий весовой датчик установлен на промежуточной жесткой плите так, чтобы его вертикальная нагрузочная ось совпадала с соответствующей осью путевого датчика. Устройство также снабжено силопередающей самоустанавливающейся опорой 10, которая установлена между опорным участком платформы и силовоспринимающим шарниром 11 магнитоупругого весового датчика, При изучении влияния величины отклонения нагрузочной оси датчика от вертикали на точность силопёредачи промежуточную жесткую плиту наклоняют и закрепляют в нужном положа- НИИ на центральном сферическом шарнире с помощью установочных винтов. Расположение центрального сферического шарнира таким образом, чтобы ось магнитоупругого весового датчика, установленного на промежуточной жесткой плите, проходила через ось путевого датчика, придает устройству достаточнзгю жесткость по вертикали. Такое расположение центрального сферического шарнира позволяет получить безмо вентное опорное устройство. В предлагаемой конструкции возможно применение двух путевых датчиков, установленных по одному на противоположных концах платформы, что позволяет автоматизировать процесс Е1звешивания колесного подвижного состава, движущегося через весы как. в прямом, так и в обратном направлениях. Весы работают следующим образом. При движении железнодорожного состава через весы со скоростью колеса подвижных единиц поочередно накатываются на концевую часть грузоприемной платформы. При этом на путевые датчики действует сжимающее усилие величина которого в момент наезда колеса на платформу пропорци нальна силе взаимодействия колеса и рельса. Таким образом, при накаты вании колес подвижного состава на край грузоприемной платформы на выходе путевых датчиков, расположенны на одном конце платформы, появляется сигнал переменного тока, который после выпрямления и сглаживания представляет собой дискретный импульс прямоугольной формы (фиг.Artповагонное взвешивание; фиг. 45поосное взвешивание). С помощью дифференцирующей цепи этот длительный импульс преобразует ся в ряд остроконечных кратковремен ных импульсов разной полярности. Один положительный остроконечный импульс соответствует одному крутому переднему фронту исходного прямоугольного импульса, возникакщему при наезде одного колеса на весы, а один отрицательный остроконечный импульс одному крутому фронту исходного прямоугольного импульса, возникающему при съезде колеса с платформы. Таким образом, число положительных остроконечных импульсов всегда равно количеству колес, накатившихся на платформу весов. Это позволяет точно определять место положения вагона относительно весов и надежно автоматизировать процесс взвешивания транспорта на ходу. Применение предлагаемых весов наиболее эффективно на подземных рудниках, где условия эксплуатации весьма тяжелые. В этих условиях весы не требуют применение особых мер защиты от вредных воздействий,1ыли, влаги и возможных обрушений горных пород.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения движущегося по рельсам объекта | 1978 |
|
SU710852A1 |
| Динамометр | 1978 |
|
SU769369A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ В ДВИЖЕНИИ И СТАТИКЕ С ПРИМЕНЕНИЕМ РЕЛЬСОВОЙ ПОДКЛАДКИ | 2008 |
|
RU2376560C1 |
| РЕЛЬСОВАЯ ПОДКЛАДКА | 2008 |
|
RU2376561C1 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |
| ОПОРА ВЕСОВОГО УСТРОЙСТВА | 1972 |
|
SU355506A1 |
| Грузоприемное устройство железнодорожных весов | 1983 |
|
SU1193466A1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ СИЛОВЫХ ВОЗДЕЙСТВИЙ МЕЖДУ МАТЕРИАЛЬНЫМИ ОБЪЕКТАМИ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101685C1 |

ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЛАТФОРМЕННЫЕ ВЕСЫ, содержащие путевые датчики, грузоприемную платформу, опирающуюся на магнитоупругие весовые датчики через самоустанавливающиеся опоры, каждый из которых установлен на промежуточной жесткой плите, снабженной центральным сферическим шарниром и установочными винтами, расположенными на фундаментной плите, отличающиеся тем, что, с целью повышения надежности работы весов за счет.исключения ложных сигналов от обрушившихся горных пород, путевые датчики установлены на фундаментной плите под промежуточной жесткой плитой и взаимодействуют с ней через силовоспринимающий центральный сферический шарнир, причем вертикальная нагрузочная ось магнитоупругого весового датчика совпадает с осью путевого датчика. 00
dt
Фиг. It
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
