1
Изобретение откосится к области транспорта и может быть использовано для определения положения отдельного колеса и тележки движущегося рельсового или безрельсового транспортного средства, например в электромеханических весах, предназначенных для автоматического взвешивания движущихся транспортных средств.
Известно устройство для обнаружения движущегося по рельсам объекта содержащее грузоприемный участок рельса, закрепленный на плите, и магнитоупругие силоизмерительные датчики, установленные под рельсом на шаровых шарнирах, закрепленных на стойке |1.
Недостатком этого устройства является то, что его механическая силовосприиимающая часть представляет собой упругую статически неопределимую систему. Это приводит к значительной неопределенности места положения колеса или тележки подвижной единицы R момент срабатывания датчика.
Целью настоящего изобретения является повышение томности определения мсС та положения отдельного колеса и колесной
тележки движущегося транспортного средства.
Цель достигается тем, что грузоприемный участок рельса свободно установлен своими концами на стойку через два силоизмерительных датчика и снабжен боковыми жесткими кронштейнами, соединенными со стойкой с помощью цилиндрических шарниров, оси которых соосны и лежат в одной вертикальной плоскости, параллельной к прямой, соединяющей шаровые шарннры.
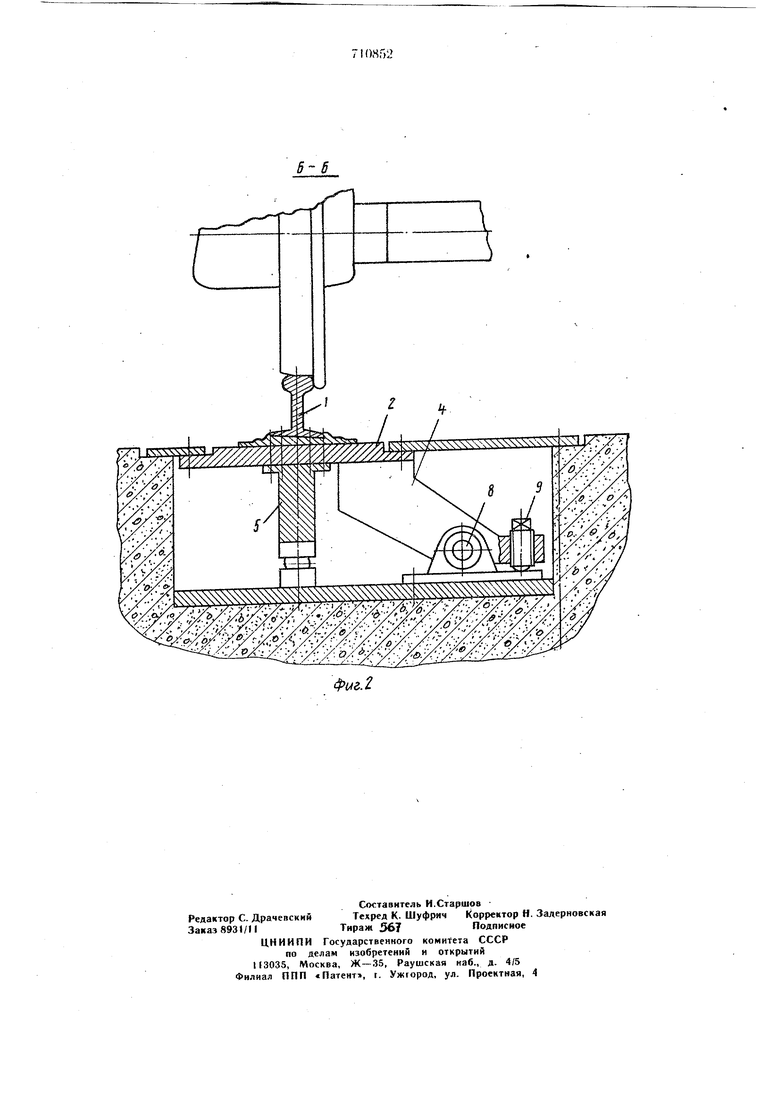
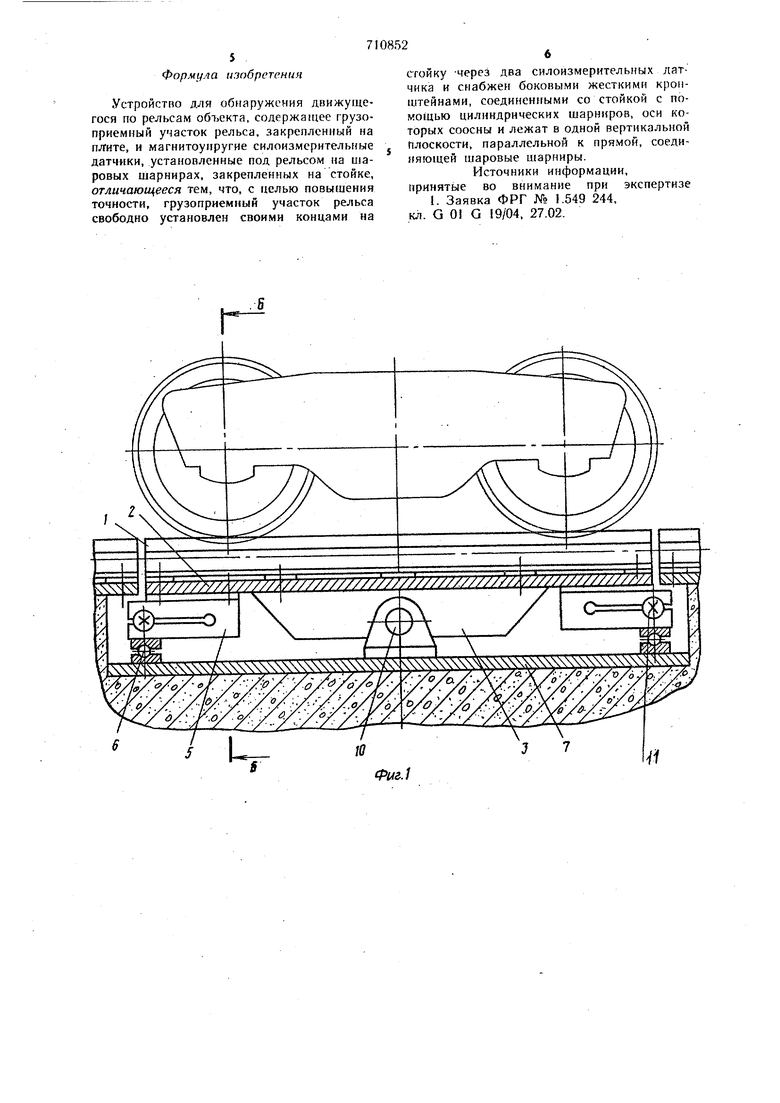
На фиг. 1 изображен общий вид устройства для обнаружения движущегося по рель::ам объекта; на фиг. 2 - вертикальный поперечный разрез Б-Б устройства.
Устройство для обнаружения движущегося по рельсам объекта имеет грузоприемный участок путепровода, выполненный, например, в виде отдельного рельса 1, закрепленного на плите 2, которая снабжена ребром 3 вертикальной жесткости и двумя боковыми кронштей.нами 4 (фиг. 2).
Плита 2 с расположенным на ней весовым рельсом I свободно опирается своими концами через силоизмернтельньк- датчики т и шаровые шарниры 6 на стойку 7 Всего
используются HUB датчика, при этом каждый из них жестко закреплен на нижней части плиты 2 под головкой рельса так, что6bf расположение силовоспринимающих шаровых шарниров б обеспечивало наименьшую величину опрокидывающего момента, возникающего при наезде колеса транспортного средства на весовой рельс I.
Боковая устойчивость устройства обеспечивается двумя боковыми кронщтейнами 4, расположенными и жестко закрепленными на концах плиты 2. Каждый кронштейн шарнирно связан со стойкой. В качестве шар- . ниров 8 примена одноподвижная вращательная кинематическая пара. Оси качания цилиндрических шарниров 8 расположены параллельно прямой, соединяющей силовоспринимаюЩне шаровые шарниры б датчиков. Этим обеспечивается достаточно полная силопередача от колес подвижного состава на силоизмерительные датчики 5.
Для того, чтобы поверхность качения рельса 1 всегда совпадала по уровню с аналогичными поверхностями примыкающих рельсов, хвостовики кронштейнов 4 снабжены упорными болтами 9. С помощью этих болтов весовой рельс 1 поднимается к стойке, что исключает возможность подпрыгивания грузоприемного рельсового участка при прохождении по нему подвижного состава.
Продольные горизонтальные усилия, возникающие при качении по рельсу I тяговых колес, воспринимаются и передаются на стойку с. помощью цилиндрического пальца 10, установленного в средней части устройства.
Длина грузоприемного рельса I больше максимального расстояния между соседними осями одной тележки и меньше минимального расстояния между ближайшими осями соседних тележек двух смежных вагонов, сцепленных между собой при помощиавтосцепки.
Каждый датчик 5 содержит скобу незамкнутого типа, в которой установлен магнитоупругий преобразователь 11, снабженный одной намагничивающей и двумя сигнальными обмотками, причем плоскость намагничивающей обмотки расположена перпендик} лярно плоскости сигнальных обмоток.
Намагничивающие обмотки двух магнитоупругих преобразователей включены между собой параллельно и питаются переменным током промыц ленной частоты от стабилизатора напряжения.
Одна пара сигнальных обмоток двух магнитоупругих преобразователей 12 предназначена для получения информации с места положения тележки в виде дискретного и прЬдолжнтельного электрического сигнала.
Другая пара сигнальных обмоток двух магнитоупругих преобразователей предназначена для получения информации с места положения отдельного колеса в виде короткого электрического импульса.
Устройство работает следующим образом При отсутствии снловой нагрузки, обусловленной давлением колес транспортного средства на рельс 1 грузоприемного участка, электрическое напряжение на выходе сигнальных обмоток преобразователя 12 равно нулю.
При наезде тележки транспортного средства на выходе сигнальных обмоток появ ляется электрический сигнал в виде напряжения переменного тока. При съезде последнего колеса тележки электрический сигнал исчезает.
При прохожденини каждой тележки через данное устройство на выходе первой пары сигнальных обмоток преобразователей 12 датчиков всегда появляется сигнал переменного тока, который после его выJ прямления и сглаживания представляет собой дискретный импульс прямоугольной формы. Длительность импульса соответствует времени прохождения колес отдельной тележки через грузоприемный рельсовый участок, амплитуда импульса пропорциональна давлению колес на рельс I грузоприемного участка. Число импульсов соответствует количеству тележек, прошедших через устройство.
Одновременно со второй пары сигнальных обмоток силоизмерительных датчиков 5 через выпрямитель снимается аналогичный сигнал Б виде дискретного прямоугольного импульса, который преобразуется в пару кратковременных импульсов разной поS лярности. Один положительный импульс соответствует одному крутому переднему фронту исходного прямоугольного импульса, Бозникаюи ему при наезде одного колеса на грузоприемный участок рельса, один отрицательный импульс всегда соответствует одному крутому заднему фронту исходного прямоугольного импульса, возникающему при съезде одного колеса с грузоприемного участка рельса 1. Таким образом, число положительных импульсов всегда равно количеству Колес, накатившихся на устройство, а число отрицательных - количеству колес, съехавших с устройства. Это позволяет точно определитьместо положения колеса в данный .момент. Кроме того, это позволяет
g производить точный счет колес, прошедших через описанное устройство, и распознавать тип движущегося транспортного средства по количеству осей.
В связи с применением принципа дейстВИЯ описанное устройство весьма надежно
в работе при определении места положения
как рельсовых транспортных средств, так и
безрельсовых.
5
Формула изобретения
Устройство для обкаружения движущегося гю рельсам объекта, содержащее грузоприемный участок рельса, закрепленный на плите, и магннтоупругие силоизмерительные датчики, установленные под рельсом на шаровых шарнирах, закрепленных на стойке, отличающееся тем, что, с целью повышения точности, грузоприемный участок рельса свободно установлен своими концами на
710852
стойку -через два силоизмерительных датчика и снабжен боковыми жесткими кронштейнами, соединенными со стойкой с помощью цилиндрических шарниров, оси которых соосны и лежат в одной вертикальной Плоскости, параллельной к прямой, соединяющей шаровые шарниры.
Источники информации, принятые во внимание при экспертизе
1. Заявка ФРГ № 1.549 244, кл. G 01 G 19/04, 27.02.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханические платформенные весы | 1983 |
|
SU1089426A1 |
| Устройство для взвешивания груза в загрузочной тележке | 1979 |
|
SU859827A1 |
| ВАГОННЫЕ ВЕСЫ ШИС | 1994 |
|
RU2082112C1 |
| Грузоприемное устройство железнодорожных весов | 1983 |
|
SU1193466A1 |
| Весы для взвешивания железнодорожных составов в движении | 1976 |
|
SU580458A1 |
| Трехкомпонентные платформенные весы | 1975 |
|
SU547646A2 |
| СПОСОБ ВЗВЕШИВАНИЯ ДВИЖУЩЕГОСЯ ЖЕЛЕЗНОДОРОЖНОГО ОБЪЕКТА | 2005 |
|
RU2287137C1 |
| ВЕСЫ ВАГОННЫЕ ПЕРЕНОСНЫЕ | 2005 |
|
RU2289106C2 |
| РЕЛЬСОВАЯ ПОДКЛАДКА | 2008 |
|
RU2376561C1 |
| ДОРОЖНО-РЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1990 |
|
RU2110427C1 |