ее
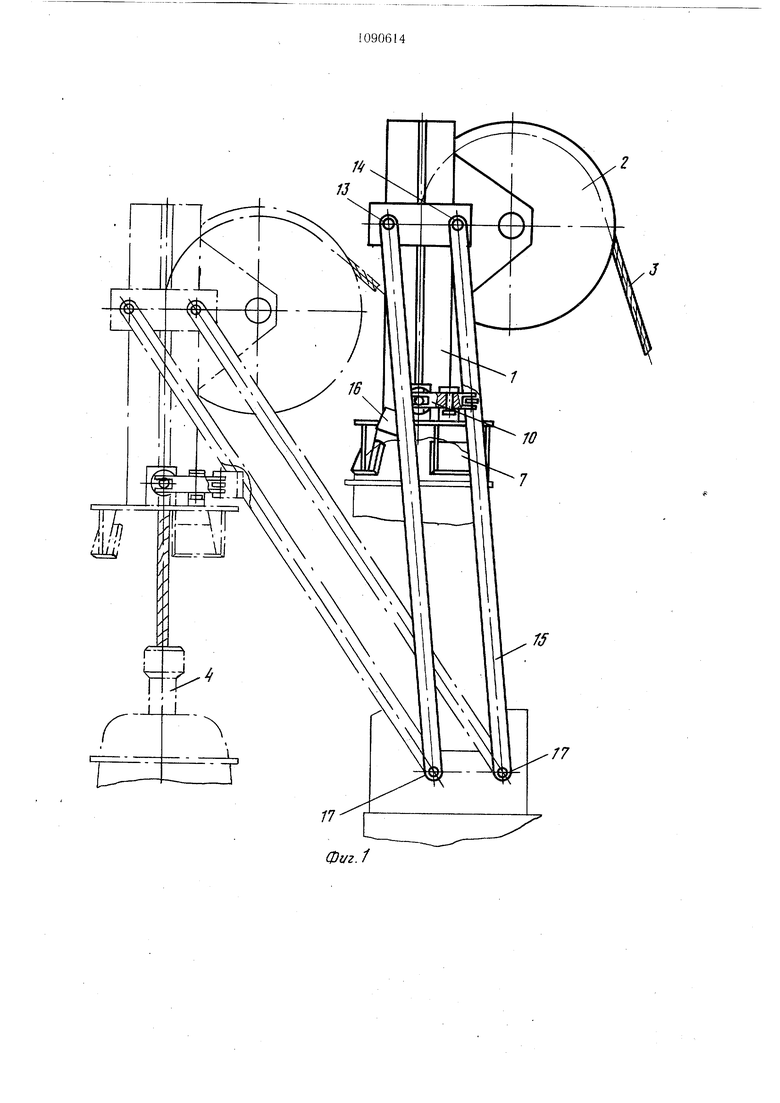
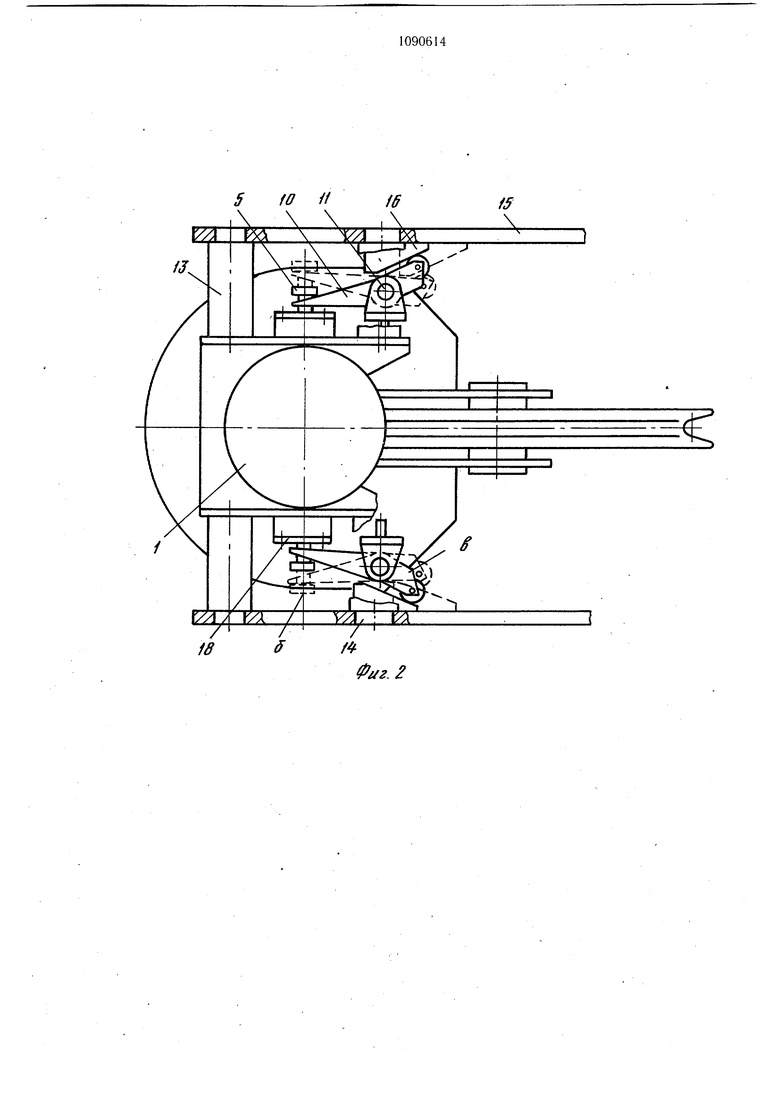
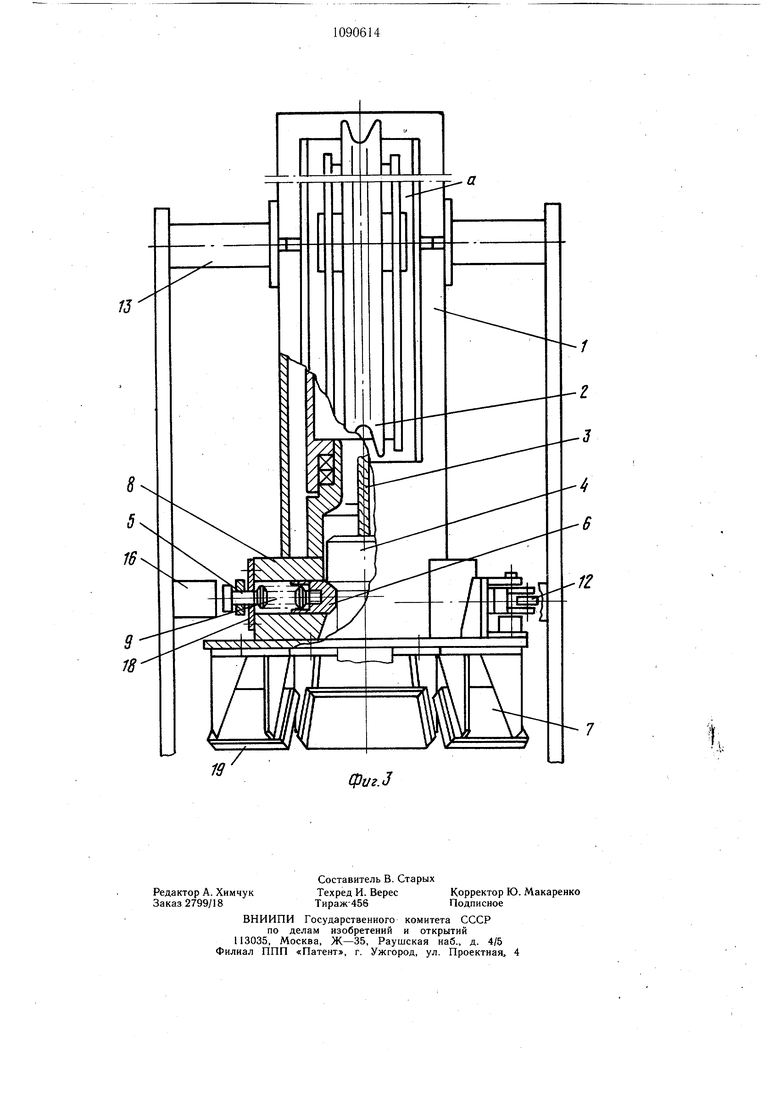
о о Изобретение опюсится к судос-роеиию. в частности к срузоза.хватиым устройствам для спуска п подъема плавучих обт-ектов. Известно грузозахватное ycipoiicTBO для спуска и подъема плавучих объектов, содержащее опорный корпус, чере;-; который пропущен трос-проводник, заведенный на блок, смонтированные на опорном корпусе фиксаторы с сухарями, взаимодействующими со Н1токами плавучих обт ектов, а также исполнительный узел перемещения фиксаторов 1. Однако известное грузозахватное устройство обладает малой надежностью и недостаточной безопасностью в эксплуатации. Целью изобретения является новыщение надежности и безопасности в эксплуатации грузозахватного устройства. Поставленная цель достигается тем, что в грузозахватном устройстве для спуска и подъема плавучих объектов. содержан1ем опорный корпус, через который пропущен трос-проводник, заведенный на блок, смонтированные на опорном корпусе фиксаторы с сухарями, взаимодействующими со штоками нлайучих объектов, а акже исполнительный узел перемещения фиксаторов, исполнительный узел перемещения фиксаторов включает шарнирно-рычажный нараллелогра.м.м, рычажные звенья которого, образующие раму, установлены с возможностью поворота в вер икальной плоскости вокруг соответствующих осей, расположенных в нижней части рамы 11ара„1лелограмма, при этом опорный корпус выполнен в виде цилиндрического стакана, закрепленного в верхней части рамы щарнирно-рычажного параллелограмма и имеющего вырез для блока, смонтированного на цилиндрическом стакане в верхней его части, причем цилиндрический стакан снабжен установленным в нижней его части улавливающим узлом для опорного элемента щтока, а рама щарнирно-рычажного нараллелограмма снабжена смонтированными на ней толкателями, сопрягаемыми посредством двуплечих рычагов с опорными роликами, установленных щирнирно в нижней части стакана, с фиксаторами сухарей, размещенными над улавливающим узло.м. Кроме того, улавливающий узел выполнен Б виде трех щек, равномерно расположенных по окружности и снабженных амортизирующими накладками, а оси щарниров двуплечих рычагов расположены по вертикалям. На фиг. 1 схематически изображено грузозахватное устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - грузозахватное устройство, вид сбоку. Грузозахватное устройство для спуска и подъема плавучих объектов содержит опорный корпус 1 и блок 2, смонтированный в верхней части корпуса 1, через которые проходит трос-проводник 3, закрепленный в iiJTOKe- 4 плавучего объекта, фиксаторы 5 с сухарями 6, смонтированные на опорном корпусе 1 и )1заимодействующими со штока м и. В нижней части опорного корпуса I, выполнепного в виде цилиндрического стакана с вырезом а подблок 2, установлены щеки 7 улавливающего узла, служащие опорной поверхностью для плавучего объекта. Фиксаторы 5 с закрепленными на них сухарями 6 смонтированы в опорах 8, закрепленных на цилиндрической части корпуса 1 и снабжены тарельчатыми пружинами 9. На корпусе 1 щарнирно закреплены двуплечие рычаги 10. Кинематическая связь сухарей 6 фиксаторов 5 с двуплечими рычагами 10, щарнирно закрепленными на вертикальных осях 11, стойки которых крепятся к основанию корпуса 1, осуп1ествляется с помощью вильчатого конца б рычага10, заходящего за бурт фиксатора 5. Свободный конец в рычага 10 заканчивается опорным роликом 12. Фиксаторы 5 с сухарями 6 раз.мещены над щека.мй 7 улавливаюгцего узла. Корпус 1 снабжен двумя параллельны ми осями 13 и 14, служащими для его крепления на поворотной в вертикальной плоскости раме 15 шарнирно-рычажного параллелограмма, являющимся исполнительным узлом перемещения фиксаторов, причем оси 13 и 14 выполнены в виде отдельных гюлуосей, прикрепленных ребрами к цилиндрической части корпуса 1. На поворотной ра.ме 15 шарнирно-рычажного параллелограмма жестко закреплены толкатели 16 клиновидной формы таким образом, чтобы при ее повороте на определенный угол своей наклоной поверхностью войти в соприкосновение с роликами 12 рычагов 10. Рычажные звенья рамы 15 установлены с возможностью поворота вокруг оси 17. Крыщки 18 опор 8 служат упором для 1ружин 9. 1ри щеки 7 улавливающего узла с амортизирую цими накладками 19 равномерно расположены по окружности и образуют поверхность, сопрягаемую с поверхностью плавучего объекта. Работа грузозахватного устройства для спуска и подъе.ма плавучих объектов осуществляется следующим образом. При выполнении операции «Спуск при травлении троса-проводника 3, закрепленного в щтоке 4 плавучего обьекта и проходящего через корпус I и блок 2, производится одновременное опускание закрепленного с помощью осей 13 и 14 на поворотной раме 15 корпуса 1 с плавучим объектом из походного положения в рабочую зону засчет их собственного веса, причем плавучий объект находится в фиксированном по.ложении между опррны.ми поверхностями ловителя 7 и сухарей 6 фиксатора 5. При повороте рамы 15 на определенный угол толкатели 16, жестко закрепленные на раме 15 и выполненные в форме клиньев, вступают во взаимодействие с роликами 12 рычагов 10. заставляя noc.ie/iHMe поворачиваться вокруг осей 11 и своими вилкообразными концами выдвигать из цилиндрического стакана корпусе 1 фиксаторы 5, сжимая при этом пружины 9 и отводя от штока 4 сухари 6 фиксаторов 5. , В момент окончательного освобождения штока 4 плавучего объекта от сухарей 6 фиксаторов 5 рама 15 дрходит до упора, пр-ёкращая свое перемещение и плавучий объект, высвободившийся из цилиндрического стакана корпуса 1, продолжает опускаться до поверхности воды с помощью троса-проводника 3 при дальнейшем его травлении. При выполнении операции «Подъем корпус 1 находится в рабочей зоне, причем ролики 12 рычагов 0 находятся во взаимодействии с. толкателями 16 рамы 15, и сухари 6 фиксаторов 5 разведены рычагами 10 в стороны, а пружины 9 сжаты. Плавучий объект поднимается тросомпроводником 3, закрепленным в его штоке 4 и проходящим через корпус 1 и блок 2, в зону нахождения грузозахватного устройства и заходит в щеки 7 улавливающего узла. После того, как корпус плавучего объекта упрется в опорные поверхности щек 7,корпус 1 жестко закрепленный на поворотной раме 15 начинает перемещаться вверх вместе с плавучим объектом с помощью того же троса-проводника 3. При этом рама 15 начинает поворачиваться вокруг осей 17, выводя толкатели 16 из взаимодействия с роликами 12 рычагов 10. Пружины 9, одним концом упираясь в крышки 18 опор 8, жестко закрепленных на корпусе 1 грузозахватного устройства, другим свои.м концом давят на сухари 6 фиксаторов 5, возвращая их во взамодействие со штоком 4 плавучего объекта. Фиксаторы 5, воздействуют на вильчатый конец рычагов 10, заставляя их вращаться вокруг осей 11 и занимать исходное положение. В дальнейшем происходит подъем грузозахватного устройства с плавучим объектом, находящимся в фиксированном положении между опорными поверхностями щек 7 улавливающего узла и сухарей 6, до закрепления грузозахватного устройства с плавучим объектом в походном положении. Использование предлагаемого устройства обес 1ечивает следующие техпико-экономнческие -преимущества: за счет предложенной конструкции корпуса, размещения блока (направляющего трос-проводник) непосредственно в верхней части корпуса, конструктивного исполнения улавливающего узла в виде трех щек с амортизирующими накладками, обеспечивающего надежную опору для плавучего объекта, а также конструкции устройства фиксации, спуск и подъем захвата с плавучим объектом производится одним тросом-проводником и, следовательно, одним приводным механизмом, что существенно облегчает работу оператора, т. е. улучщаются условия эксплуатации; за счет конструктивного исполнения обеспечивается исключение нагрузочного воздействия на сухари фикса: торов в процессе спуска-подъема (эта нагрузка воспринимается только тросом), в результате повышается надежность устройства. Кроме того, за счет установки на корпусе грузозахватного устройства рычагов с роликами, кинематически связанными с сухарями фиксаторов, и шарнирного крепления корпуса грузозахватного устройства на поворотной раме в виде шарнирно-рычажного параллелограмма, снабженной толкателями, фиксация и расфиксация плавучего объекта в зоне взаимодействия роликов рычагов с толкателями осуществляется автоматически, что устраняет ручные операции, характерные для базового объекта, и, как следствие, повышает надежность и безопасность работы, улучшает условия эксплуатации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для спуска и подъема плавучих объектов | 1976 |
|
SU608701A1 |
| Грузозахватная балансирная траверса В.П.Зайцева и ее варианты | 1980 |
|
SU984975A1 |
| Устройство для спуска длинномерных материалов под шахтной клетью | 1982 |
|
SU1056585A2 |
| Нижний выталкиватель пресса для объемной штамповки с кривошипно-шатунным исполнительным механизмом | 1986 |
|
SU1344628A1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| УПОР ДЛЯ ОСТАНОВКИ ПАКЕТА ЛИСТОВ НА РОЛЬГАНГЕ | 1989 |
|
RU2019327C1 |
| Стенд для испытаний буровых станков | 1987 |
|
SU1504320A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Устройство для подъема затонувших объектов | 1990 |
|
SU1754569A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
1. ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВУЧИХ ОБЪЕКТОВ, содержащее опорный корпус, через который пропущен трос-проводник, заведенный на блок, смонтированные на опорном корпусе фиксаторы с сухарями, взаимодействующими со штоками плавучих объектов, а также исполнительный узел пере.мещения фиксаторов, отличающееся тем, что, с целью повыщения надежности и безопасности в эксплуатации, исполнительный узел перемещения фиксаторов включает щарнирно-рычажный параллелограмм, рычажные звенья которого, образующие раму, установлены с возможностью поворота в вертикальной плоскости вокруг соответствующих осей, расположенных в нижней части рамы параллелограмма, при этом опорный корпус выполнен в виде цилиндрического стакана, закрепленного в верхней части рамы шарнирно-рычажного параллелограмма и имеющего вырез блока, смонтированного на цилиндрическом стакане в верхней его части, причем цилиндрический стакан снабжен установленным в нижней его части улавливающим узлом для опорного элемента штока, а рама шарнирно-рычажного параллелограмма снабжена смонтированными на пей толкателями, сопрягаемыми посредством двуплечих рычагов с опорными роликами, установленных щарнирно в нижней части i стакана, с фиксаторами сухарей, размещенными над улавливающим узлом. (Л 2. Устройство по п. 1., отличающееся тем, что улавливающий узел выполнен в виде трех щек; равномерно расположенных по окружности и снабженных амортизирующими накладками, а оси щарниров двуплечих рычагов расположены по вертикалям.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват для спуска и подъема плавучих объектов | 1976 |
|
SU608701A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| , | |||
