1
Изобретение относится к эксплуатации плавучих объектов флота.
Известен захват для спуска и подъема плавучих объектов, содержащий корпус, через который проходит трос-проводник, и ползун, смонтированный в корпусе и кинематически связанный с поворотными на осях сухарями, взаимодействующими с установленными на плавучих объектах штоками 1.
Недостатками такого захвата являются недостаточная надежность и безопасность его работы в условиях волнения моря, сложность конструкции и низкая технологичность. Это происходит вследствие того, что в условиях волнения моря за счет перемещения ползуна под действием штока с одной стороны и пружины с другой детали захвата подвергаются многократным ударным знакопеременным нагрузкам, при этом не исключена возможность самопроизвольного выскальзывания штока из сухарей.
Целью изобретения является повышение надежности и безопасности работы захвата в условиях волнения моря, упрощение его конструкции и повышение технологичности.
Для этого корпус снабжен фиксатором с защелкой и выполнен в виде двух соединенных между собой щек, а поворотные на осях сухари смонтированы вне ползуна на щеках и выполнены с вырезом, охватывающим всю
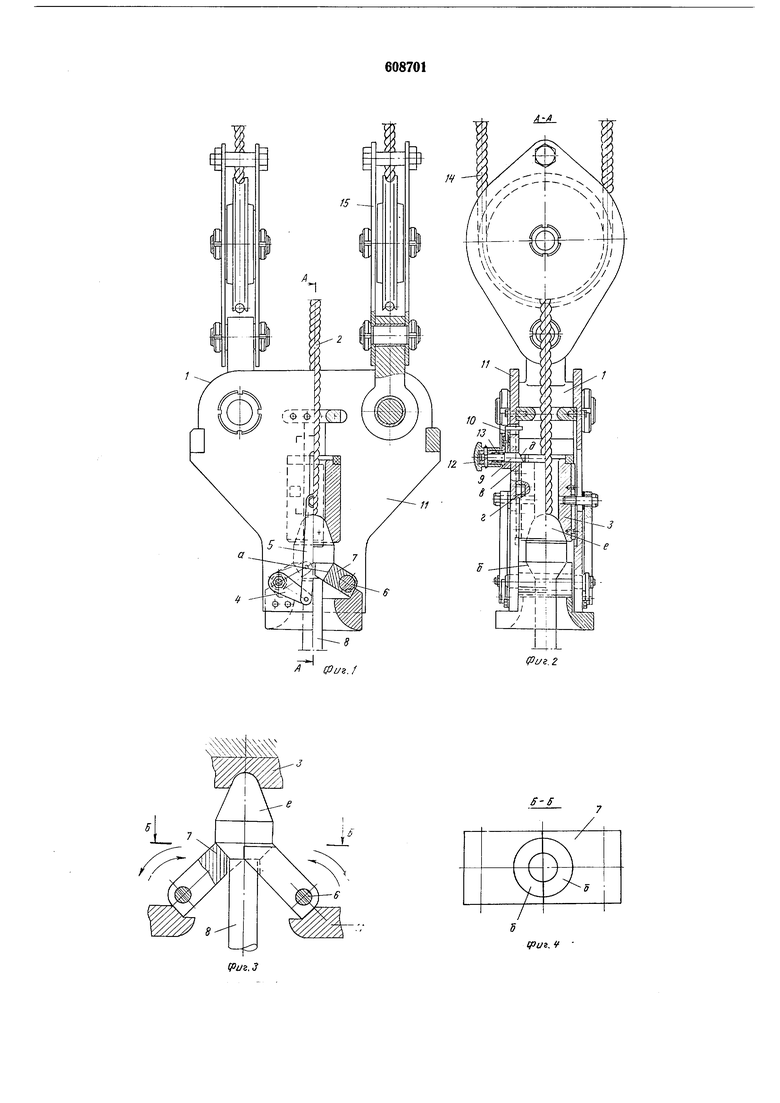
опорную поверхность штока, при этом ползун выполнен с гнездами, сопрягаемыми с фиксатором. На.фиг. 1 изображен предложенный захват,
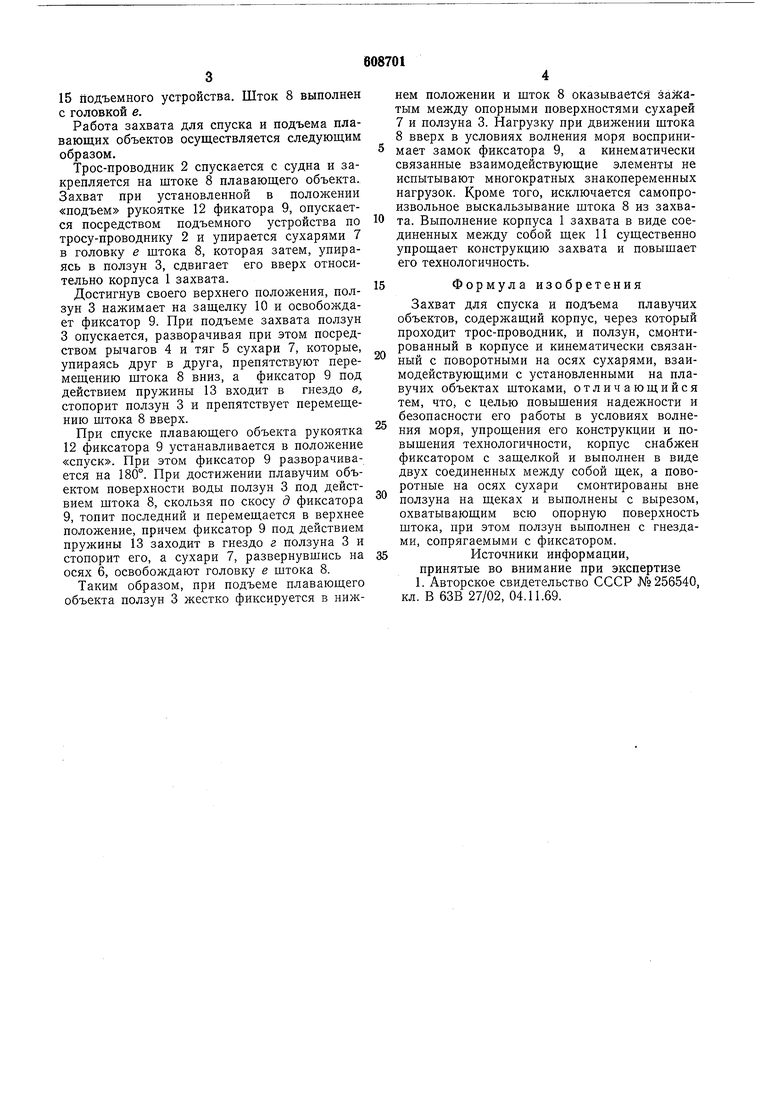
общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 -схема взаимодействия сухарей со штоком плавучего объекта; на фиг. 4 - сечение Б-Б на фиг. 3.
Захват для спуска и подъема плавучих объектов содержит корпус 1, через который проходит трос-проводник 2, и ползун 3, смонтированный в корпусе 1 и кинематически связанный посредством рычагов 4 и тяг 5 с поворотными на осях 6 сухарями 7, взаимодействующими с установленными на плавучих объектах штоками 8. Корпус 1 снабжен фиксатором 9 с защелкой 10 и выполнен в виде двух соединенных между собой щек 11, а поворотные на осях 6 сухари 7 смонтированы вне
ползуна 3 на щеках 11 и выполнены с вырезом а, охватывающим всю опорную поверхность б штока 8, что обеспечивает стопроцентный ее охват и снижение удельного давления штока 8 на сухари 7 до минимума. Ползун 3
выполнен с гнездами виг, сопрягаемыми с фиксатором 9 и необходимыми для жесткой фиксации его в положениях «спуск и подъем. Фиксатор 9 выполнен со скосом д и снабжен рукояткой 12 и пружиной 13. Корпус 1
захвата подвешен па тросах 14 через блоки
15 подъемного устройства. Шток 8 выполнен с головкой е.
Работа захвата для спуска и подъема плавающих объектов осуществляется следующим образом.
Трос-проводник 2 спускается с судна и закрепляется на штоке 8 плавающего объекта. Захват при установленной в положении «подъем рукоятке 12 фикатора 9, опускается посредством подъемного устройства по тросу-проводнику 2 и упирается сухарями 7 в головку е штока 8, которая затем, упираясь в ползун 3, сдвигает его вверх относительно корпуса 1 захвата.
Достигнув своего верхнего положения, ползун 3 нажимает на защелку 10 и освобождает фиксатор 9. При подъеме захвата ползун 3 опускается, разворачивая при этом посредством рычагов 4 и тяг 5 сухари 7, которые, упираясь друг в друга, препятствуют перемещению штока 8 вниз, а фиксатор 9 под действием пружины 13 входит в гнездо в, стопорит ползун 3 и препятствует перемещению штока 8 вверх.
При спуске плавающего объекта рукоятка 12 фиксатора 9 устанавливается в положение «спуск. При этом фиксатор 9 разворачивается на 180°. При достижении плавучим объектом поверхности воды ползун 3 под действием штока 8, скользя по скосу д фиксатора 9, топит последний и перемещается в верхнее положение, причем фиксатор 9 под действием пружины 13 заходит в гнездо г ползуна 3 и стопорит его, а сухари 7, развернувшись на осях 6, освобождают головку е штока 8.
Таким образом, при подъеме плавающего объекта ползун 3 жестко фиксируется в нижнем положении и шток 8 оказывается заЖатым между опорными поверхностями сухарей
7и ползуна 3. Нагрузку при движении штока
8вверх в условиях волнения моря восприиимает замок фиксатора 9, а кинематически
связанные взаимодействующие элементы не испытывают многократных знакопеременных нагрузок. Кроме того, исключается самопроизвольное выскальзывание штока 8 из захвата. Выполнение корпуса 1 захвата в виде соединенных между собой щек И существенно упрощает конструкцию захвата и повышает его технологичность.
Формула изобретения
Захват для спуска и подъема плавучих объектов, содержащий корпус, через который проходит трос-проводник, и ползун, смонтированный в корпусе и кинематически связанный с поворотными на осях сухарями, взаимодействующими с установленными на плавучих объектах штоками, отличающийся тем, что, с целью повышения надежности и безопасности его работы в условиях волнения моря, упрощения его конструкции и повышения технологичности, корпус снабжен фиксатором с защелкой и выполнен в виде двух соединенных между собой щек, а поворотные на осях сухари смонтированы вне ползуна на щеках и выполнены с вырезом, охватывающим всю опорную поверхность штока, при этом ползун выполнен с гнездами, сопрягаемыми с фиксатором. 5Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР №256540, кл. В 63В 27/02, 04.11.69.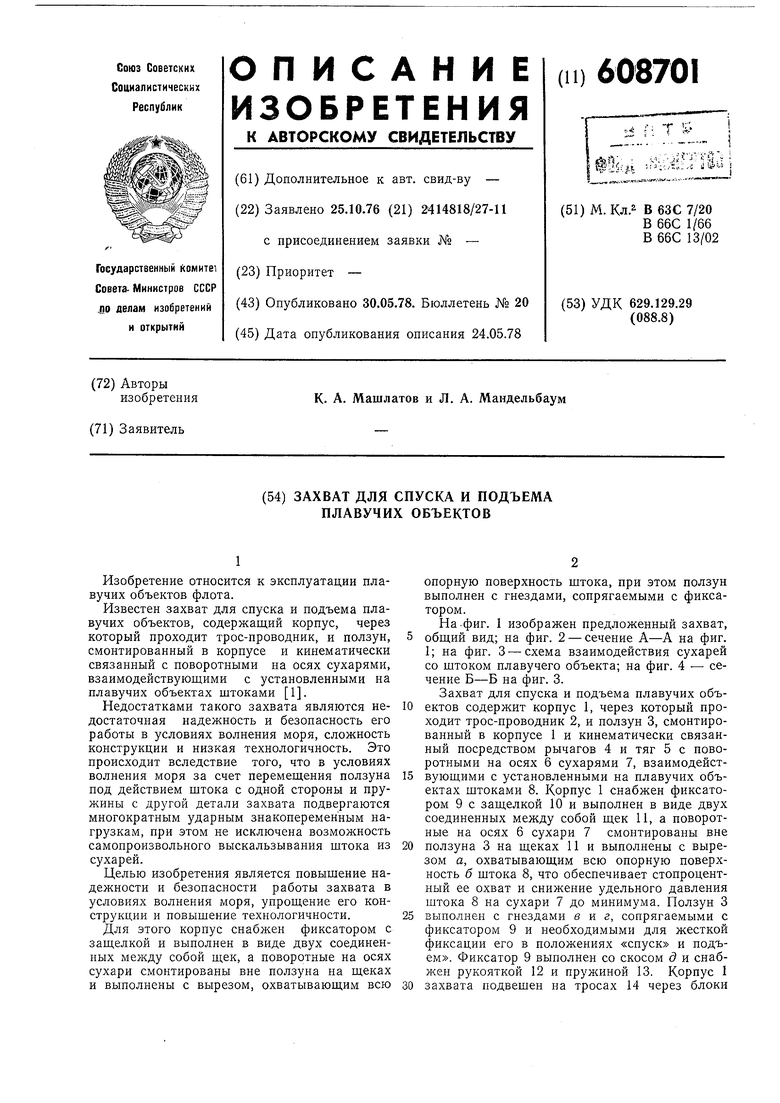
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство для спуска и подъема плавучих объектов | 1982 |
|
SU1090614A1 |
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| ШЛЮПОЧНОЕ УСТРОЙСТВО&>&!Б1^^^::„. | 1970 |
|
SU278447A1 |
| УСТРОЙСТВО для ЗАСТРОЙКИ МАЛЫХ СУДОВ ПРИ ПОДЪЕМЕ ИХ НА ПАЛУБУ СУДНА-БАЗЫ( ВПТБ | 1969 |
|
SU256540A1 |
| Судовое подъемно-опускное устройство для плввучих объектов | 1976 |
|
SU569478A1 |
| СПОСОБ ПОДЪЕМА В УСЛОВИЯХ МОРСКОГО ВОЛНЕНИЯ ОБЪЕКТОВ, РАСПОЛОЖЕННЫХ НА ДНЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424152C1 |
| Шток подъемного устройства | 1981 |
|
SU992310A2 |
| Судовое подъемно-опускное устройство для плавучих объектов | 1974 |
|
SU484122A1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ К ПЛАВАЮЩЕМУ СУДНУ | 2013 |
|
RU2538739C1 |
| УСТРОЙСТВО для ЗАСТРОПОВКИ ПЛАВАЮЩИХ ОБЪЕКТОВ | 1970 |
|
SU278446A1 |