11
. Изобретение относится к системам управления автоматизированным электроприводом агрегатов с непрерьюным . технологическим процессом, в частности, трубоэлектросварочных, профилегибочных и других агрегатов.
По основному авт. св. № 935873 известна система управления агрегатом с петлевым устройством, содержащая пЪследовательно соединенные первый командоаппарат, первьп сумматор, первый выпрямитель, первый задатчик скорости и первый блок управления, подключенный выходом к электроприводу механизма нагона полосы, последовательно соединенные второй командоаппарат, второй сумматор, второй выпрямитель, второй задатчик скорости и второй блок управления, подключенный выходом к электроприводу механизма выбора полосы, меХанически связанный с валом электропривода петлевого устройства сельсин-датчик, который через последовательно, соединеннее фазовыпрями- тель, третий выпрямитель, первый ограничитель и инвертор подключен выходом к второму входу второго сумматора, и третий сумматор, первым входом соединенный с выходом задатчика величины запаса полосы, вторым входом через четвертый выпрямитель - с выходом фазовыпрямителя, а выходом через последовательн соединенные пятый выпрямитель и второй ограничитель - с вторым входом первого сумматора tl.
Недостатком известной системы является ее низкая надежность, вызванная тем, что при существенном изменении скорости длительно работающих механизмов технологической линии для изменения сортамента или режима сварки требуется изменение оператором уставки регулятора запаса петли. Есл из-за невнимательности оператор не изменит уставку, то либо произойдет нарушение непрерывной работы (при существенном увеличении технологической скорости) , либо нарушится оптимальный режим работы привода (пр уменьшении скорости).
Цель изобретения - повьш1ение надежности системы.
Поставл нная цель достигается тем что в системе управления агрегатом с петлевым устройством дополнительно установлены делитель и тахогенера162
тор, причем выход задатчика величины запаса полосы соединен с первым входом третьего сумматора через делитель, второй вход которого соеднен с выходом тахогенерахора, установленного на валу электропривода мханизма выбора полосы.
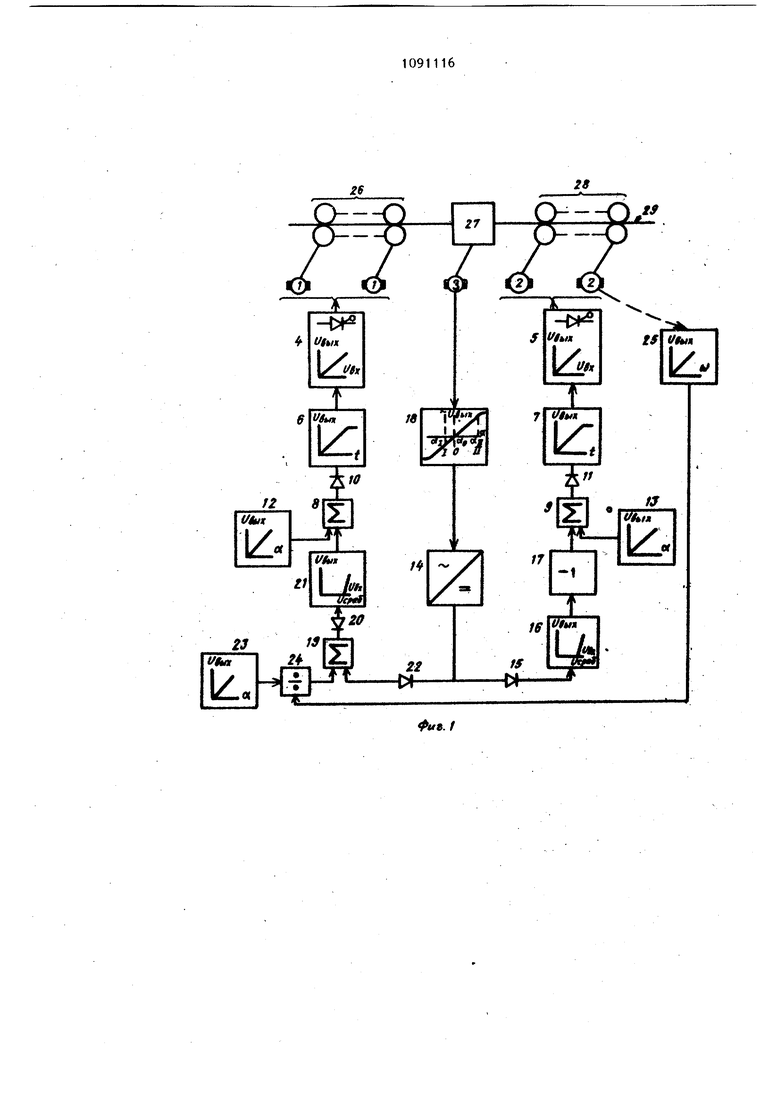
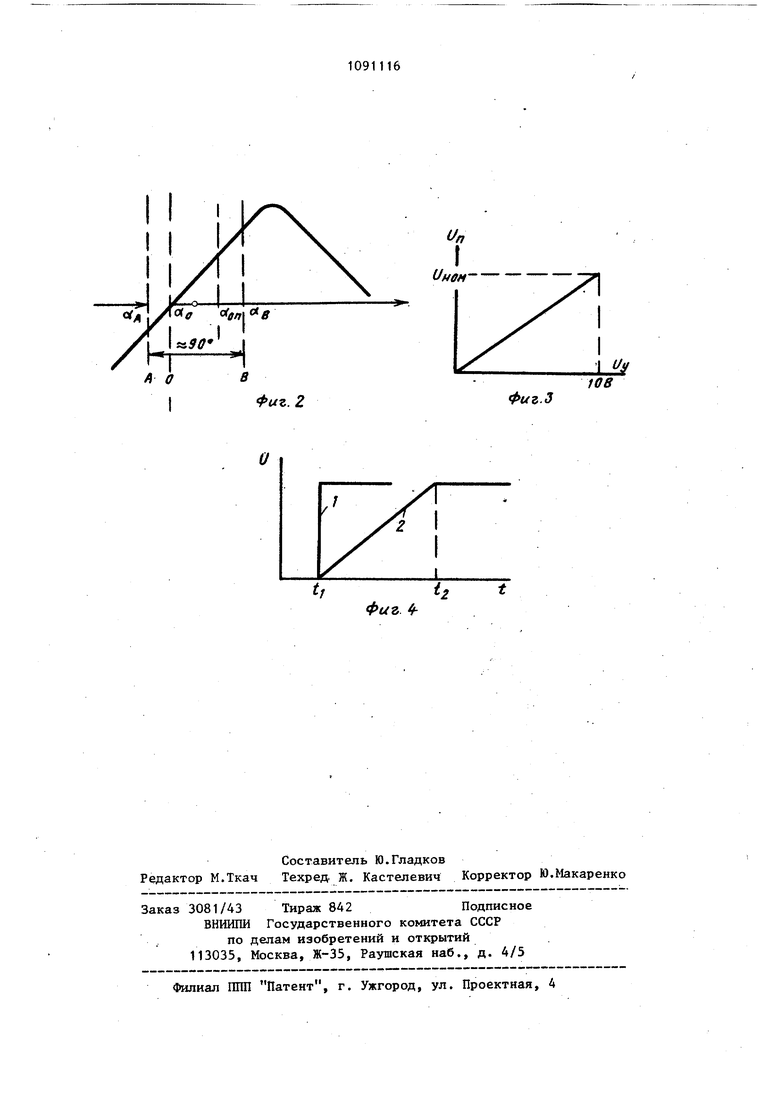
На фиг. 1 изображена структурная схема предлагаемой системы} на фиг. 2 - зависимость выходного напржения сельсина-датчика от угла поворота его ротора; на фиг. 3 - характеристика блока управления на фиг. характеристика задатчика скорости.
Система содержит электропривод 1 механизма нагона полосы (в петлевое устройство), электропривод 2 механизма выбора полосы (из петлевого устройства), электропривод 3 петлевого устройства, первый и второй блки 4 и 5 управления (соответственно приводами 1 и 2), первьй и второй задатчики 6 и 7 скорости, первый и второй сумматоры 8 и 9, первый и второй выпрямители 10 и 11, пер-. вый и второй командоаппараты 12 и 13, фазовыпрямитель 14, третий выпрямитель 15, первый ограничитель 16, инвертор 17, сельсин-датчик 18. третий сумматор 19, пятый выпрямитель 20, второй ограничитель 21, четвертый вьшрямитель 22, задатчик 23 величины запаса полосы, делитель 24, тахогенератор 25, механизм 26 нагона полосы, петлевое устройство 27, механизм 28 выбора полосы, полоса 29. На фиг. 1-4 обозначено: А - положение поворота ротора , сельсин-датчика 18, при котором начинается запасание полосы 6 положение поворота ротора сельсиндатчика 18 при наибольщем запасе, О - положение поворота ротора сельсин-датчика 18 в начале зоны минимально допустимого запаса полосы; и«- напряжение выходного сигнала сельсин-датчика 18; эС угол поворота ротора сельсинадатчика угол, соответствующий оптималыгому запасу полосы; Uu - напряжение сигнала на входе блока 4(5); UM напряжение на выходе блока 4(5) (тиристорного
преобразователя); и,- - сигнал на выходе i-го функгрюнального блока
системы; t - текущее время.
Система работает следующим образом. 3Выходной сигнал задатчика 23 величины запаса полосы поступает на первый вход Делимое делителя 24,на второй вход Делитель подается выходной сигнал тахогенератора 25,который в исходном состоянии равен нуАю. Если в процессе работы системы механизмом нагона полосы 26 с электроприводом 1 механизма нагона полосы полоса 29 нагоняется в петлевое устройство 27 со скорост заданной первым командоаппаратом 12, то электропривод петлевого устройства 3 вращается в сторону увели чения запаса полосы 29 в петле. Величина запаса полосы 29 в петле определяет угол поворота сельсиндатчика 18 и, следовательно, величину и знак сигнала на выходе фазовыпрямителя 14. При нагоне петли полосы 29 выход ной сигнал сельсин-датчика 18, выпр ленный фазовыпрямителем 14, пропускается четвертым выпрямителем 22 на второй вход третьего сумматора 19 и складывается в нем с выходным сигналом делителя 24, определякмцим желаемую величину запаса полосы 29 и поступающим на второй вход третье го сумматора 19. Сумма этих сигнало определяет сигнал на выходе третьего сумматора 19, который при достижении величины пробоя втррого ограничителя 21 поступает на второй вхо п|ервого сумматора 8 и вычитается из выходного сигнала первого команде - аппарата 12. Величин пробоя второг ограничителя 21 подбирается такой, чтобы сигнал сельсин-датчика 18 начинал поступать на второй вход первого сумматора 8 в зоне полного заполнения петлевого устройства 27 когда на выходе делителя 24 напряжение минимальное, получающееся при подаче на первый вход делителя 24 минимального выходного сигнала задатчика величины запаса полосы 23 и на второй вход - максимального для данного стана выходного сигнала та хогенератора 25, соответствующего максимальной скорости электропривода 2 механизма выбора полосы. Начавший в зоне полного заполнения петлевого устройства поступать на второй вход первого сумматора 8 сигнал противоположен по знаку сигналу первого командоаппарата 12. Выходной сигнал первог .16 4 сумматора 8 начинает уменьшаться и соответственно уменьшается сигнал первого задатчика 6 скорости, первого блока 4 управления и скорость электропривода 1 механизма нагона полосы. Когда поступающая на второй вход первого сумматора 8 сумма выходных сигналов делителя 24 и сельсин-датчика 18 полностью компенсирует выходной сигнал первого команд оаппарата 12, выходной сигнал первого сумматора 8 будет равен нулю и электропривод 1 механизма нагона полосы остановится. Если увеличится-выходной сигнал задатчика 23 величины запаса полосы, то соответствейно увеличится вькодной сигнал делителя 24, поступающий на первый вход третьего сумматора 19. При этом так как сигналы на обоих входах,третьего сумматора одного знака, пробой второго ограничителя 21 наступает при меньшем выходном сигнале сельсин-датчика 18, а значит, при меньшем запасе полосы 29 в петлевом устройстве 27 будет скомпенсирован выходной сигнал первого командоаппарата 12, в первом сумматоре 8 произойдет остановка электропривода 1 механизма нагона полосы. Таким образом, на второй вход первого сумматора 8 поступит сигнал, встречный выходному сигналу первого командоаппарата 12, тогда, когда запас полосы 29 в петлевом устройстве 27 достигнет величины, соответствукщей заданной задатчиком 23 величины запаса полосы. f Если при каком-то положении задатчика 23 величины запаса полосы скорость механизма выбора полосы 28 из петлевого устройства 27 уменьшится, то соответственно уменыиится выходной сигнал тахогенератора 25, поступающий на второй вход делителя 24, и соответственно увеличится выходной сигнал делителя 24, поступакяций на первый вход третьего сумматора 19. При этом пробой второго ограничителя 21 и замедление приводов скорости электропривода 1 механизма нагона полосы произойдет при меньшем запасе полосы 29. Таким образом, происходит автоматическое изменение уставки величины запаса полосы 29 в петлевом устройстве 27
в функции скорости электропривода 2 механизма выбора полосы.
Так как рабочая скорость элекТ роприводов в системе меняется в диапазоне 2:1 (редко 3:1), то можно выбрать величину минимального сигнала (для наибольшего использования петлевого устройства 27), при которой уставка величины запаса полосы 29 оказывается с достаточной точностью пропорциональной скорости электроприводов системы.
При уменьшении запаса полосы 29 в петлевом устройстве 27 уменьшается сигнал на выходе сельсин-датчика 18 и, следовательно, уменьшается выходной сигнал фазовыпрямител 14, поступающий на второй вход третего сумматора 19, и уменьшается выходной сигнал третьего сумматора 19. При этом скорость электропривода 1 механизма 26 увеличивается.
Когда запас полосу 29 в петлевом устройстве 27 и, следовательно, выходной сигнал сумматора 19 станет меньше величины, соответствукицей выходному сигналу задатчика 23 величины запаса полосы, автоматически меняющейся при изменении скорости электропривода 2 механизма выбора полосы 2, алгебраическая сумма сигналов на входах первого сумматора 8 создает на его выходе сигнал начала .нагона полосы 29 в петлю.
При выработке запаса полосы 29 до минимальной величины выходной сигнал сельсина-датчика 18, прошедший через фазовыпрямитель 14 и третий выпрямитель 15, достигает величины пробоя первого ограничителя 16, инвертируется по знаку инвертором 17 и подается на второй вход второго сумматора 9, где алгебраи:чески суммируется с выходным сигналом второго командоаппарата 13. При этом начинают уменьшатся сигналы на выходах второго сумматора 9, второго эадатчика 7 скорости, второго 5 блока управления и соответственно уменьшается скорость электропривода 2 механизма вы бора полосы.
При полной выработке петли полос 29, выходной сигнал сельсина-датчика 18 полностью компенсирует выходной сигнал второго командоаппарата 13, поступающий на первый вход второго сумматора 9, выходной сигнал сумматора 9 становится равным нулю, I электропривод 2 механизма выбора полосы останавливается, выходной сигнал тахогенератора 25, поступающий на вход Делитель делителя 24, также становится равным нулю. В это случае выходной сигнал делителя 24 теоретически становится равным бесконечности, а практически делитель 24 входит в насьш;ение. При нагоне петли полосы 29 электропривод 2 механизма-выбора полосы уходит из положения, соответствующего отсутствию запаса полосы 29, выходной сигнал сельсина-датчика 18 перестает компенсировать выходной сигнал второго командоаппарата 13 на входах второго сумматора 9, выходной сигнал второго сумматора
9перестает быть равным нулю и электропривод 2 механизма выбора полосы начнет свое движение.
Первый и второй выпрямители
10и 11 предотвращают возможный реверс электроприводов 1 и 2 механизмов нагона и выбора полосы, если выходной сигнал сельсина-датчика 18 превысит выходные сигналы от первого и второго командоаппаратов 12 и 13.
Таким образом, благодаря введению в систему делителя 24 и тахогенератора 25 обеспечивается автоматическое регулирование величины задания запаса полосы 29 в петлевом устройстве 27 в функции скорост технологического процесса производства продукции при непрерывном регулировании скорости механизмов 26, перед и 28 за петлевым устройством 27 и тем самым примерно в шесть раз т &вьплается надежность данной системы по сравнению с базовым объектом.
Фиг. Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления агрегатом с петлевым устройством | 1980 |
|
SU935873A1 |
| Система управления агрегатом с петлевым устройством | 1982 |
|
SU1122387A1 |
| Система управления агрегатом с многопетлевым накопителем | 1983 |
|
SU1082506A1 |
| Система управления агрегатом с петлевым устройством | 1977 |
|
SU670352A1 |
| Система управления агрегатомОТдЕлКи пОлОСОВОгО пРОКАТА | 1979 |
|
SU818688A1 |
| Система автоматического останова участкаНАгОНА пЕТли НЕпРЕРыВНОгО АгРЕгАТА | 1979 |
|
SU818690A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Система автоматического останова участка нагона петли непрерывного агрегата | 1980 |
|
SU891188A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Система управления непрерывным полосовым агрегатом | 1984 |
|
SU1219195A1 |
СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ С ПЕТЛЕВЫМ УСТРОЙСТВОМ по авт. св. № 935873, отличающаяся тем, что, с целью повышения надежности системы .в ней установлены делитель и тахогенератор, причем выход задатчика величины запаса полосы соединен с первым входом третьего сумматора через делитель, второй вход которого соединен с выходом тахогенератора, установленного на валу электропривода механизма выбора полосы.
О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления агрегатом с петлевым устройством | 1980 |
|
SU935873A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
