1
Изобретение. относится к устройствам д„1я управления автоматизированными электроприЕОдамн агрегатов с непрерывным технологическим процессом, в частности агрегатов для отделки полосового проката, непрерывных профилегибочных и т. п. станов.
Наиболее близкой к описываемой системе по технической сущности и достигаемому результату является система управления непрерывными технологическими агрегатами отделки полосового проката, содержащая приводную лебедку натяжных барабанов, командоапиараты, первый и второй задатчики скорости, подключенные к блокам управления нриводами механизмов соответственно нагона и выбора петли
1. Недостатком данной системы является
низкая надежность работы, связанная с возможностью недопустимой выработки или переполнения петлевого устройства агрегата.
Целью настоящего изобретенпя является повыщение надежности работы системы.
Для осуществления этой цели известная система дополняется первым и вторым сумматором, выходы которых подключены через диоды к входам соответственно первого и второго задатчиков скорости, первые
входы сумматоров подключены к соответствующему командоаппарату, второй вход первого сумматора подключен к выходу фазовыпрямителя через последовательно соедпненные диод и стабилитрон, второй вход второго сумматора подключен к выходу фазовыпрямителя через последовательно соединенные инвертор, диод и стабилитрон, вход фазовыпрямителя подключен к сельсин)-датчику, связанному с приводной лебедкой натяжных барабанов.
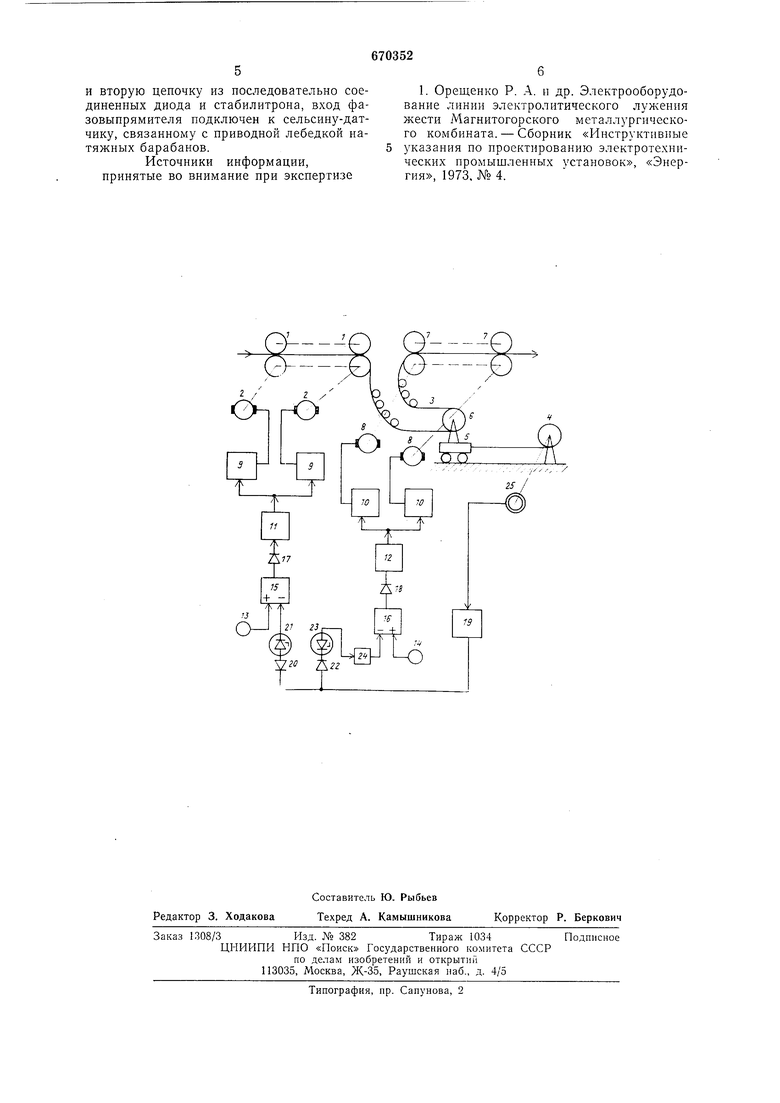
На чертеже приведена функциональная схема предлагаемой системы. Механизмы 1 с приводами 2 обеспечивают нагон петли в петлевое устройство 3 с приводной лебедкой 4, перемещающей тележку 5 с натяжным барабаном 6. Механизм 7 с приводами 8 обеспечивают выбор петли из петлевого устройства 3 (на чертеже показано горизонтальное петлевое устройство, но система применима и к вертикальным петлевым устройствам).
Нриводы 2 и 8 управляются блоками 9 и 10 управления еоответственно. Задатчики 11 и 12 скорости обеспечивают изменение с необходимым темпом задающего спгнала скорости на входах блоков 9 и 10 управления соответственно ириводом 2 и 8. Величины скорости в установнвщихся режимах работы определяются командоаппаратами 13 и 14, включенными на входы плюс сумматоров 15 и 16. Выходы сумматоров 15, 16 подключены к входам задатчиков скорости 11, 12 через диоды 17 и 18 соответственно. Второй вход сумматора 15 подключен со знаком минус к выходу фазовынрямителя 19 через последовательно соединенные диод 20 и стабилитрон 21. Второй вход сумматора 16 также подключен со знаком минус к выходу фазовыпрямителя 19 через последовательно соединенные диод 22, стабилитрон 23 и инвертор 24. Диод 22 и стабилитрон 23 включены встречно диоду 20 и стабилитрону 21. Влод фазовыпрямителя 19 подключен к сельсиндатчику 25, связанному с приводной лебедкой 4 натяжного барабана 6 так, чтобы в среднем положении тележки 5 выход сельсин-датчика 25 был нулевым, а угол поворота сельсин-датчика 25, соответствующий полному ходу тележки 5, не превышал бы 60-70°. Тогда при уходе тележки 5 со среднего положения в сторону увеличения или уменьшения петли сигнал сельсин-датчика 25 изменяется по величине с изменением фазы на 180°. Фазовыпрямитель 19 обеспечивает выпрямление сигнала сельсин-датчика 25 со знаком, соответствуюш,им фазе его сигнала.
Работа системы происходит следуюш,им образом.
Если механизмами 1 полоса нагоняется в петлевое устройство 3 со скоростью, заданной командоаппаратом 13, то тележка 5 с натяжным барабаном 6 перемещается лебедкой 4 в сторону увеличения петли. При этом сигнал сельсин-датчика 25, выпрямленный фазовыпрямителем 19, пропускается диодом 20 и при достижении величины пробоя стабилитрона 21 поступает на вход сумматора 15 встречно задающему сигналу от командоаппарата 13. Напряжение пробоя стабилитрона 21 подбирается так, чтобы сигнал сельсин-датчика 25 начинал поступать на вход сумматора 15 в зоне приближения тележки 5 к своему конечному положению, соответствующему заполненному петлевому устройству 3. Выходной сигнал сумматора 15 начинает уменьшаться, соответственно уменьшаются сигналы задатчика 11 скорости, блоков 9 управления и скорость приводов 2. При полном заполнении петлевого устройства 3 сигнал сельсин-датчика 25 полностью компенсирует задающий сигнал от командоаппарата 13 на входе сумматора 15 и механизмы 1 останавливаются. При уменьшении петли и уходе тележки 5 с крайнего положения приводы 2 механизмов 1 автоматически начинают нагон петли.
Если петля вырабатывается механизмами 7 и уменьшается так, что тележка 5 приближается к противоположному крайнему положению, сигнал сельсин-датчика 25, выпрямленный фазовыпрямителем 18,
пропускается диодом 22 и после пробоя стабилитрона 23 подается на инвертор 24, где инвертируется по знаку, и далее на вход сумматора 16. Па сумматоре 16 сигнал сельсин-датчика 25 алгебраически суммируется с задающим сигналом от командоаппарата 14. При этом начинают уменьшаться сигналы на выходе сумматора 16, задатчика скорости 12, блока 10 управлеПИЯ и соответственно уменьшается скорость приводов 8 и механизмов 7. При полной выработке петли из петлевого устройства 3 сигнал сельсин-датчика 25 полностью компенсирует задающий сигнал от командоаппарата 14 на входе сумматора 16, задатчика скорости 12, блока 10 управления и соответственно уменьшается скорость приводов 8 и механизмов 7. При полной выработке петли из петлевого устройства 3
сигнал сельсин-датчика 25 полностью компенсирует задающий сигнал от командоаппарата 14 на выходе сумматора 16 и механизмы 7 останавливаются. При увеличении петли и уходе тележки 5 с крайнего положения приводы 8 механизмов 7 автоматически начинают работать и вырабатывать петлю.
Диоды 17 и 18 предотвращают возможный реверс приводов 2, 8 и механизмов
1, 7, если сигнал от сельсин-датчика 25 превысит задающий сигнал от командоаппарата 13 и 14.
Таким образом, обеспечивается непрерывное регулирование скорости механизмов
нагона или выбора петли в зоне переполнения или опорожнения петлевого устройства и тем самым повышается надежность работы агрегата.
Формула изобретения
Система управления агрегатом с петлевым устройством, содержащая приводную лебедку натяжных барабанов, командоаппараты, первый и второй задатчики скорости, соединенные с блоками управления приводами механизмов соответственно нагона и выбора петли, отличающаяся тем, что, с целью повышения надежности
работы, система дополнительно содержит первый и второй сумматоры, фазовыпрямитель, инвертор, сельсин-датчик, два диода и две цепочки, состоящие из последовательио соединенных диода и стабилитрона,
нричем выходы сумматоров соединены через диоды с входами соответственно первого и второго задатчиков скорости, первые входы сумматоров подсоединены к соответствующему командоаппарату, второй вход
первого сумматора соединен с выходом фазовыпрямителя через первую цепочку из последовательно соединенных диода и стабилитрона, второй вход второго сумматора подключен к выходу фазовыпрямителя через последовательно соединенные инвертор
и вторую цепочку из последовательно соединенных диода и стабилитропа, вход фазовыпрямителя подключен к сельсину-датчнку, связанному с приводной лебедкой натяжных барабанов.
Источники информации, принятые во внимание при экспертизе
1. Орещенко Р. А. и др. Электрооборудование линии электролитического лужения жести Магнитогорского металлургического комбината. - Сборник «Инструктивные указания по проектированию электротехнических промышленных установок, «Энергия, 1973. № 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления агрегатом с петлевым устройством | 1982 |
|
SU1122387A1 |
| Система управления агрегатом с многопетлевым накопителем | 1983 |
|
SU1082506A1 |
| Система управления агрегатом с петлевым устройством | 1980 |
|
SU935873A1 |
| Система управления агрегатом с петлевым устройством | 1982 |
|
SU1091116A2 |
| Система управления агрегатомОТдЕлКи пОлОСОВОгО пРОКАТА | 1979 |
|
SU818688A1 |
| Система автоматического останова участкаНАгОНА пЕТли НЕпРЕРыВНОгО АгРЕгАТА | 1979 |
|
SU818690A1 |
| Устройство для управления аккумулятором стальной полосы | 1971 |
|
SU437053A1 |
| Система автоматического останова участка нагона петли непрерывного агрегата | 1980 |
|
SU891188A1 |
| Устройство слежения за координатой сварного шва на стане бесконечной прокатки | 1990 |
|
SU1736652A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
, .
