flf5 Oi
to
J
дом с 24, а па третий - сигнал, пропорциональный скорости электропривода механизма напора, с выхода датчика 16 скорости. С однополярного выхода ОУ 22 на второй управляющий вход сис темы 13 управления электроприводом
напора поступает сигнал для упреждения срабатьшания устр-ва защиты. Это исключает заход ближайших к стреле точек рукояти 2 за Границу допустимого приближения к стреле. 1 з.п.ф-лы, 1 аа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Устройство для определения положения ползуна кривошипно-шатунного механизма | 1989 |
|
SU1753257A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
Изобретение относится к области управления и защиты одноковшовых экскаваторов . Цель - повьшение надежности работы устр-ва путем упрощения схемы и наладки. Для этого оно снабжено блоком перемножения (БП) 21,вто. рым операционным усилителем (ОУ) 23, сумматором (С) 24 и узлом 26 определения синуса и косинуса угла поворота рукояти 2. Косинусный выход узла 26 подключен к первым входам С 24 и БП 21, а синусный - к входу ОУ 23. К второму входу БП 21 подключен выход датчика 15 вылета рукояти 2. Выход БП 21 соединен с вторым входом С 24. К третьему и четвертому входам С 24 подключены однополярные выходы ОУ 23. Пятый вход С 24 соединен с источником 20 питания постоянного напряжения. Выходной сигнал С 24, пропорциональный расстоянию от стрелы 1 до ближайших к стреле точек рукояти 2, поступает на первый вход первого ОУ 22. На его второй вход поступает сигнал, пропорциональный скоросрги приближения к стреле, с выхода блочка 25 дифференцирования, связанного с выхо(Л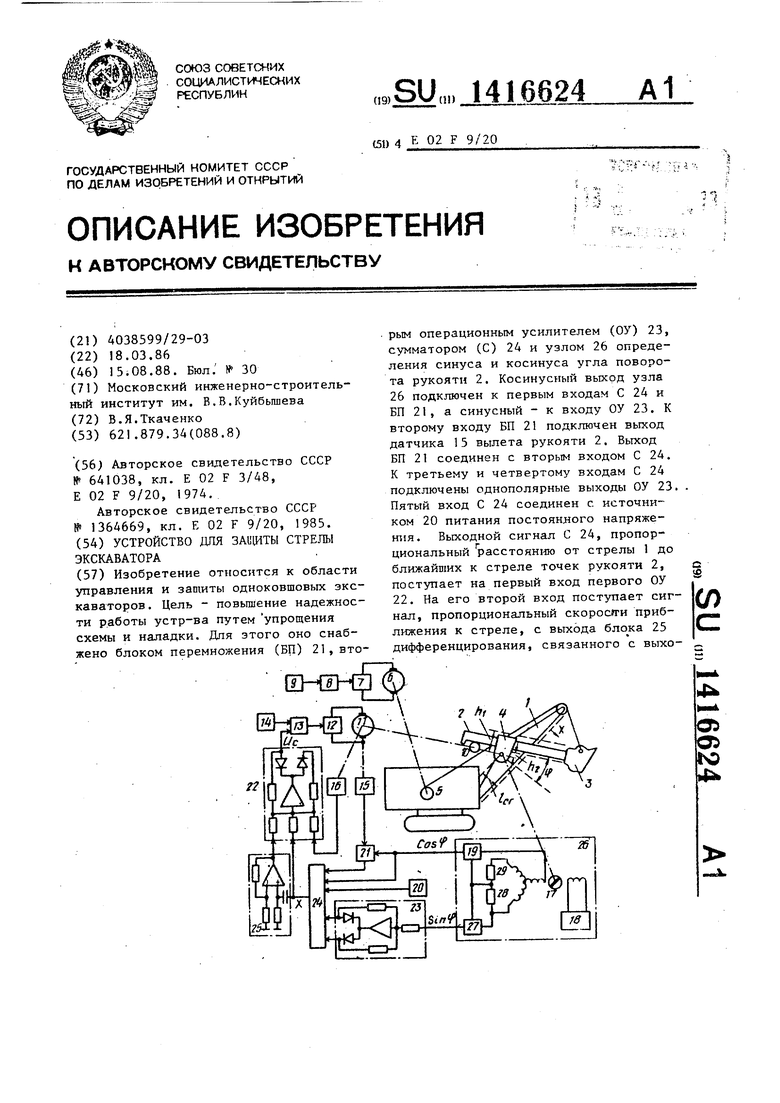
Изобретение относится к управлению и защите одноковшовых экскаваторов и предназначено для защиты стрел экскаватора с рабочим оборудованием меха- нической лопаты от ударов рукоятью.
Целью изобретения является повышение надежности работы устройства пу-; тем упрощения схемы и наладки.
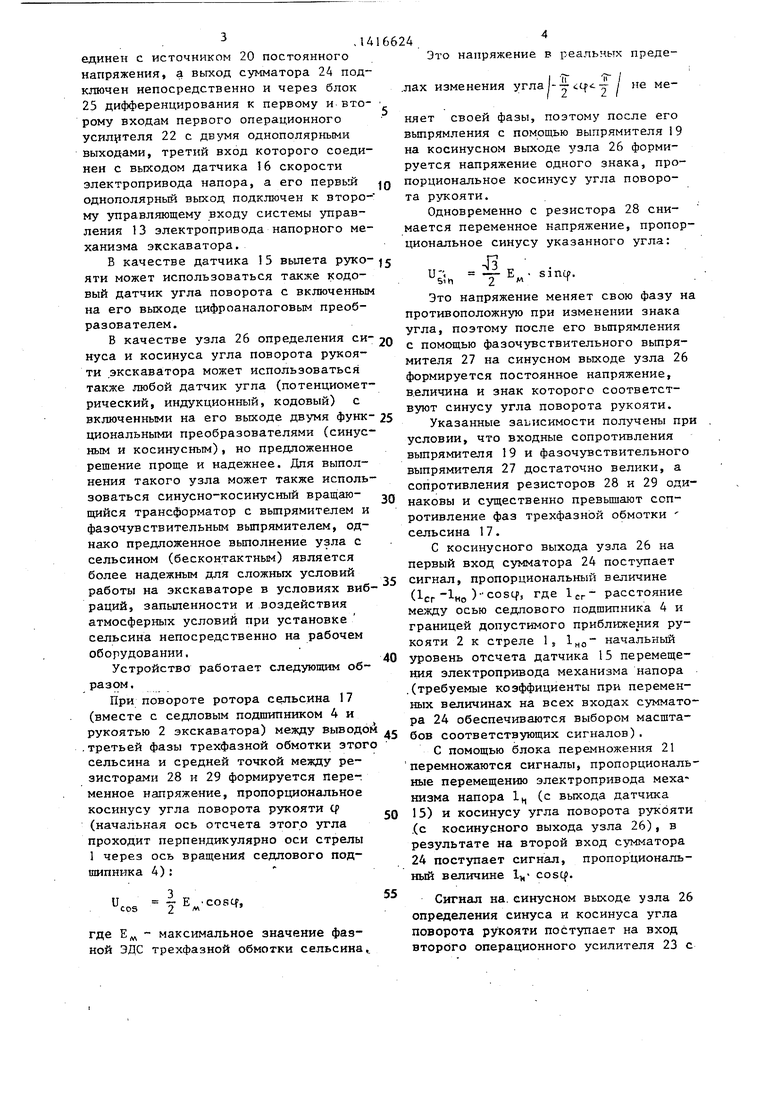
На чертеже приведена схема ycTpoftства.
На чертеже указаны стрела 1 экскаватора, рукоять 2 с ковшом 3, с едло- вой подшипник 4. Барабан 5 механизма подъема приводится в движение приводом подъема, включающим в себя двигатель подъема 6 с питающим его управляемым преобразователем 7 (генератором или тиристорньм преобразова- телем), системой управления 8 и источником управляющего сигнала (коман- доаппаратом) привода подъема 9. Механизм 10 напЪра приводится в движение приводом напора, включающий в себя двигатель 11, управляемый преобразователь 12, систему управления 13 и источник управляющего сигнала (коман- доаппарат) 14.
Устройство для защиты стрелы со- держит датчик 15 вылета рукояти, который может быть выполнен в виде сельсина с подключенным к его однофазной обмотке источником переменного напряжения и с подключенным к вы- водам его трехфазной обмотки выпрямителем, либо в виде фазовращателя с включенным на его выходе преобразователем сдвига фаз в постоянное напряжение, датчик 16 скорости электро- привода механизма на:пора, сельсин 17 с подключенным к его однофазной обмотке источником 18 переменного напряжения, вьшрямитель 19, источник 20 постоянного напряжения, блок 21 иеремножения, первый и второй операционные усилители 22 и 23 с двумя одно- полярными выходами, сумматор 24 (может быть выполнен на базе операционного усилителя), блок 25 дифференцирования и узел 26 определения синуса и косинуса угла поворота рукояти 2 экскаватора, включающий в себя указанный сельсин 17 с подключенным к его однофазной обмотке источником 18 переменного напряжения, выпрямитель 19, а также дополнительно введенные фазочувствительный вьшрямитель 27 и два резистора 28 и 29, причем два резистора 28 и 29 включены последовательно между вьшодами двух фаз трехфазной об мотки сельсина, средняя точка между этими резисторами соединена с общей точкой выпрямителя 19 и фазо- чувствительного выпрямителя 27, а крайний вывод одного из этих резисторов 28 подключен ко входу фазочувст- вительного выпрямителя 27, выход которого соединен с синусным выходом указанного узла 26, вьшод третьей фазы сельсина 17 подключен ко входу выпрямителя 19, выход которого соединен с косинусным выходом этого узла 26, а ось сельсина 17 соединена с поворачивающимся вместе с рукоятью 2 седловым подшипником 4 экскаватора, косинусный выход узла 26 определения синуса и косинуса угла поворота рукояти экскаватора подключен к первому входу сумматора 24 и к первому входу блока 21 перемножения, второй вход которого подключен к выходу датчика 15 вылета рукояти, а выход блока 21 перемножения подключен ко второму входу сумматора 24, синусный выход указанного узла 26 подключен ко входу второго операционного усилителя 23, первый и второй однополярные выходы которого подключены соответственно к третьему и четвертому входам сумматора 24, пятый вход которого соединен с источником 20 постоянного напряжения, а выход сумматора 24 подключен непосредственно и через блок 25 дифференцирования к первому и второму входам первого операционного усип41теля 22 с двумя однополярными выходами, третий вход которого соединен с выходом датчика 16 скорости электропривода напора, а его первьй однополярный выход подключен к второму управляющему входу системы управления 13 электропривода напорного ме- ханиэма экскаватора.
В качестве датчика 15 вылета рукояти может использоваться также кодовый датчик угла поворота с включенным на его выходе цифроаналоговым преобразователем.
В качестве узла 26 определения синуса и косинуса угла поворота рукояти экскаватора может использоваться также любой датчик угла (потенциомет- рический, индукционный, кодовый) с включенными на его выходе двумя функциональными преобразователями (синусным и косинусным), но предложенное решение проще и надежнее. Для выполнения такого узла может также использоваться синусно-косинусный вращающийся трансформатор с выпрямителем и фазочувствительным вьтрямителем, однако предложенное выполнение узла с сельсином (бесконтактным) является более надежным для сложных условий работы на экскаваторе в условиях вибраций, запыленности и воздействия атмосферных условий при установке сельсина непосредственно на рабочем оборудовании.
Устройство работает следующим образом.
При повороте ротора сельсина 17 (вместе с седловым подшипником 4 и рукоятью 2 экскаватора) между выводом .третьей фазы трехфазной обмотки этого сельсина и средней точкой между резисторами 28 и 29 формируется neper менное напряжение, пропорциональное косинусу угла поворота рукояти ср (начальная ось отсчета этого угла проходит перпендикулярно оси стрелы 1 через ось вращения седлового подшипника 4) ;
cos 2
где Е - максимальное значение фазной ЭДС трехфазной обмотки сельсина
Это напряжение в реальных преде.лах изменения угла )- (i -
не ме
0
5
0
5
0
35
0
5
0
5
няет своей фазы, поэтому после его выпрямления с помощью выпрямителя 19 на косинусном выходе узла 26 формируется напряжение одного знака, пропорциональное косинусу угла поворота рукояти.
Одновременно с резистора 28 снимается переменное напряжение, пропорциональное синусу указанного угла:
s. fЭто напряжение меняет свою фазу на противоположную при изменении знака угла, поэтому после его выпрямления с помощью фазочувствительного выпрямителя 27 на синусном выходе узла 26 формируется постоянное напряжение, в.еличина и знак которого соответствуют синусу угла поворота рукояти.
Указанные зависимости получены при условии, что входные сопротивления выпрямителя 19 и фазочувствительного выпрямителя 27 достаточно велики, а сопротивления резисторов 28 и 29 одинаковы и существенно превышают сопротивление фаз трехфазной обмотки сельсина 17.
С косинусного выхода узла 26 на первый вход сумматора 24 поступает сигнал, пропорциональнь й величине ( )C°S4 5 где Icr- расстояние между осью седлового подшипника 4 и границей допустимого приближения рукояти 2 к стреле 1, 1„о начальный уровень отсчета датчика 15 перемещения электропривода механизма напора .(требуемые коэффициенты при переменных величинах на всех входах сумматора 24 обеспечиваются выбором масштабов соответствующих сигналов).
С помощью блока перемножения 21 перемножаются сигналы, пропорциональные перемещению электропривода механизма напора 1ц (с выхода датчика 15) и косинусу угла поворота рукояти .(с косинусного выхода узла 26), в результате на второй вход сумматора 24 поступает сигнал, пропорциональный величине l,- coscf.
Сигнал на. синусном выходе узла 26 определения синуса и косинуса угла поворота рукояти поступает на вход BTOpdro операционного усилителя 23 с
двумя однополярными выходами и при одном знаке входного сигнала формирует на одном из однополярных выходов
операционного усилителя 23 напряже, ние, пропорциональное величине -п х
X sin ( (на другом выходе этого усилителя напряжение при этом равно--лулю), а при другом знаке входного сигнала Hft втором однополярном выходе этого усилителя появляется сигнал,пропорциональ ный величине +h (на первом однополярном выходе этого усилителя напряжение при этом равно нулю), где h, и h, - расстояния от оси седлового подшипника 4 до линий, проходящих - , вдоль оси ружояти .2 через соответственно верхнюю и нижнюю точки конет-, рукции рукояти 2 и ковша 3, которые при неточном управлении могут ударить по верхней и -нижней частям стрелы 1. Использование второго операционного усилителя 23 с двумя однополярными выходами йозволяет достаточно просто и практически без ненужной зоны нечувствительности (при переходе через нуль входного сигнала) обеспечить изменение коэффициентов при синусном сигнале при изменении направления по
ворота рукояти 2, необходимость кото- 30 ты устройства и надежность рабочего рого определяется тем, что в верхней оборудования экскаватора(необходии нижней частях стрелы координаты ближайших к ней точек рабочего оборудования разлЕ-гчны. Указанные сигналы с однополярных выходов операционного усилителя 23 поступают соответственно на третий и четвертьш входы сумматора 24, на пятый вход которого с выхода источника 20 постоянного напряжения поступает сигнал, пропорциональный
-1ег -. .
В результате на выходе сумматора 24 формируется сигнал, пропорциональный расстоянию X от.стрелы 1 до бли- Д5
КсС -Ь Зт Р з °
где Kg - коэффициент пропорхионально- ти между выходным сигналом
и,
и расстоянием х от границы приближения к стреле;
.14166246
жайших к стреле точек рукояти 2 в соответствии с вьфажением:
X 1ц- costf + dcr -но) cosc| - h X X sinq - ICT
h, при sintp 0
где h
0 при sintfrO hj при sintf iO.
Выходной сигнал сумматора 24 поступает на первый вход первого операционного усилителя 22 с двумя однопо- лярными выходами, на второй и третий входы которого поступают сигналы, . пропорциональные скорости приближеdxНИН к стреле j. (с выхода блока 25
дифференцирования) и скорости элект- ропривода механизма напора V) с выхода датчика 16 скорости, причем последние два сигнала служат для упреж- дения срабатьшания устройства защиты с целью исключения возможности захода ближайших к стреле точек рукояти за границу допустимого приближения -к стреле, что повьппает надежность рабо
мость такого -упреждения срабатьшания защиты определяется инерционностью электропривода и механизма, которые не могут мгновенно остановиться при появлении сигнала защиты), а также для обеспечения практически неколебательного переходного процесса при действии защиты, что также способствует повышению надежности.
Поскольку выходной сигнал первого операционного усилителя 22 снимается с одного из однополярных выходов, величина итого сигнала определяется выражением:
dx
при (х-ьк,,, KIJ,-U,)-O,
Н.
К. - коэффициенты упреждения срабатьгоания защиты по скоростным сигналам.
714
При большем вылете рукояти, когда отсутствует опасность удара по стреле, выходной сигнал первого операционного усилителя 22 равен нулю и не оказьшает влияния на работу электроприводов, движение которых определяется при этом величинами сигнала на выходах источников задающих сигналов (командоаппаратов) 14 и 9. При приближении к границе допустимого приближения к стреле (уменьшается величина х) сумма входных сигналов первого операционного усилителя 22 меняет знак и на его выходе проявляется сигнал такого зна ка, который, поступая на вход системы управления 13 электропривода напора, компенсирует сигнал с выхода источника 14 задающего сигнала и останавливает этот электропривод и механизм напора, исключая при этом удар по стреле из-за уменьшения вьшета рукояти. Если при работающем приводе подъема продолжается приближение к стреле в результате поворота рукояти вокруг оси седлово- го подшипника, подъемный канат нама- тьшается на барабан 5 в верхней части стрелы или сматывается с барабана 5 в нижней части стрелы, то увеличивающийся в соответствии с приведенной зависимостью выходной сигнал первого операционного усилителя 22 обеспечивает .реверсирование электропривода напора и перемещение ближайших к стреле точек рукояти вдоль границы допустимого приближения (вверх в верхней части стрелы и вниз в нижней части стрель), исключая тем самым возможность удара по стреле из-за перемещения механизма подъема.
Благодаря наличию упреждающих скоростных сигналов защита срабатьшает тем раньше, чем больше скорость приближения к стреле ближайших точек рукояти (сумма входных сигналов первого операционного усилителя 22 меняет свой знак при тем большем расстоянии от граничной линии, чем больше абсолютные значения скорости уменьшения этого расстояния), что обеспечивает надежность работы устройства и надежность рабочего оборудования экскаватора. Формула изобретения
I. Устройство для защиты стрелы экскаватора, содержащее источники упг равляющих сигналов, системы управле0
5
0
5
624
ния и управляемые преобразователи электродвигателей подъема и напора, датчик скорости электродвигателя напора, датчик вылета рукояти, источник постоянного напряжения, блок дифференцирования, первый операционный усилитель, выход которого подключен к второму входу системы управления электродвигателя напора, отличающееся тем, что, с целью повьшзения надежности работы путем упрощения схемь: и наладки, оно снабжено блоком перемножения, вторым опе- рационньм усилителем, сумматором и узлом определения синуса и косинуса угла поворота рукояти, косинусный выход которого подключен к первому входу сумматора и к первому входу блока перемножения, второй вход которого подключен к выходу датчика вылета рукояти, а выход к второму входу сумматора, синусный выход узла определения синуса и косинуса угла поворота рукояти подключен к входу второго операционного усилителя, первый и второй выходы которого подключены соответственно к третьему и четвертому входам сумматора, пятый выход соединен с источником постоянного напряжения, а выход сумматора подк.пючен непосредственно и через блок дифференцирования соответственно к первому и второму входам первого операционного уси- 5 лителя, третий выход которого соединен с выходом датчика скорости электродвигателя напора. (
0
5
0
5
ч I662A1
узла, вывод третьей фазы сельсина которого соединен с косинусным выхо- подключен к входу рыпрямптеля, выход дом этого узла.
| Устройство для управления электроприводами подъема и тяги драглайна | 1974 |
|
SU641038A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
