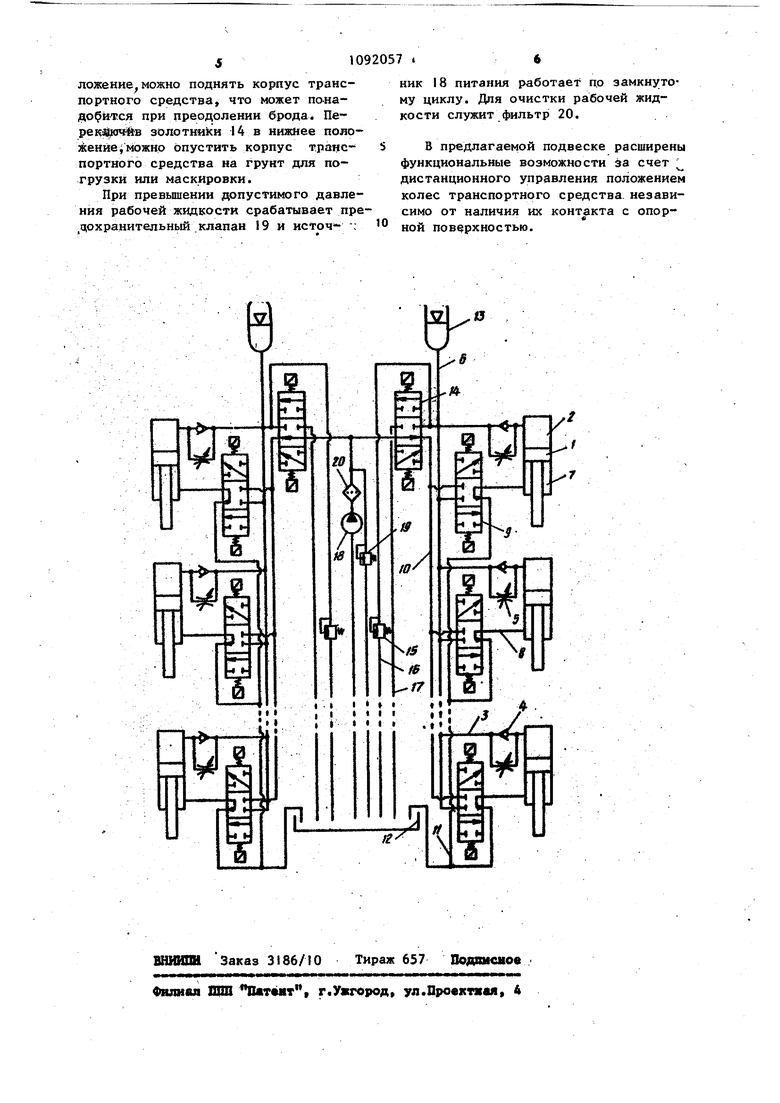
Изобретение относится к подвескам транспортных средств и, в частности к гидропневматическим управляемым подвескам. Известна гидропневматическая управляемая подвеска транспортного средства, содержащая смонтированные между осями колес транспортного сред ства и его корпусом гидроцилиндры, связанные своей одной рабочей полостью непосредственно, а другой - чере обратные клапаны и золотники горизон тирования с гидрома истралями соответствующего борта транспортного средства, которые 1ерез гидропневмоаккумулятор, золотник управления им и источник питания связаны с резе вуаром рабочей жидкости П Недостатком известной подвески являются ее ограниченные функциональ ные возможности, так как она не управляет дистанционно положением каждого колеса вне зависимости от его контакта с рабочей, поверхностью. Цель изобретения - расширение функциональных позможностей подвески путем обеспечения дистанционного управления положением каждого колес вне зависимости от его контакта с опорной поверхностью. Поставленная цель достигается тем что гидропневматическая управляемая подвеска транспортного средства, содержащая смонтированные между осями колес транспортного средства и его корпусом гидроцилиндры, связанные своей одной рабочей полостью непосредственно, а другой - через обрат ные клапаны и золотники горизонтирования с гидромагистралями соответ ствующего борта транспортного средства, которые через гидропневмоакку мулятор, золотник управления им и источник питания связаны с резервуа ром рабочей жидкости, снабжена отде ными для каждого борта транспортног средства магистралями высокого давления, каждой из которых золотник управления соответствующего гидропневмоаккумулятора связан с золотниками горизонтирования этого борта транспортного средства, и магистралями, связывающими золотники управления гидропневмоаккумуляторами с резервуаром. Кроме того, в каждой магистрали, связывающей соответствующий золотник управления гидропневмоаккумулятора с резервуаром, установлен предохранительный клапан, а каждый золотник горизонтирования выполнен трехпозиционным. На чертеже представлена схема гидропневматической управляемой подвески транспортного средства. Гидропневматическая управляемая подвеска транспортного средства содержит стойки колес, представляю щие собой гидроцилиндры 1, поршневые полости 2 которых соединены гидромагистралями 3, содержащими обратные клапаны 4 и регулируемые дроссели 5 с общей для подвески одного борта гидромагистралью 6. Штоковые полости 7 гидроцилиндров I присоединены гидромагистралями 8 к золотникам 9 горизонтирования. Золотники 9 горизонтирования каждого борта присоединены к общей гидромагистрали 6, к общей гидромагистрали 10 высокого давления и к общей магистрали ели- ва 11, соединенной с резервуаром 12. Каждая из двух общих гидромагистралей 6 присоединена к собственному гидропневмоаккумулятору 13. Каждый из двух гидропневмоаккумуляторов 13 подключен к золотнику 14 через предох ранительньм клапан 15, связанный с резервуаром 12 гидромагистралью 16. К этому же золотнику 14 присоединена и общая магистраль 10 высокого давления. Каждый из золотников 14 соединен с резервуаром-12 отдельной гидромагистралью 17. Оба золотника 14 соединены между собой и подключены к общему источнику 18 питания через предохранительный клапан 19 и фильтр 20, Гидропневматическая управляемая подвеска транспортного средства работает следующим образом. При движении транспортного средства по относительно ровной опорной поверхности все золотники занимают исходные позиции, как показано на схеме. Источник питания 18 не работает. Все колеса прижимаются к опорной поверхности, выбирая ее неровности за счет перераспределения жидкости между гидроцилиндрами 1 каждого из бортов. Демпфирование осуществляется за счет упругости газа в гидропневмоаккумуляторах 13. При движении транспортного средства вверх или вниз по склону или при наезде на препятствие горизонтирование в продольной плоскости осуществляется за счет искусственного догружения колес, оказавшихся наименее нагруженными. Для этого сигнал от датчика горизонтирования (це показан) поступает на золотники горизонтирования 9 наименее нагружен ньк колес и переключает их в нижнее положение. Рабочая жидкость поступает через гидромагистраль 6, золотник 9 горизонтирования, гидромагистраль 8 в штоковую полость гидроцилин ра 1 и догружает его. Обратный клапан 4 при этом закрывается и жидкость 15 из поршневых полостей 2 гидроцилиндров 1 вытесняется через управляемый дроссель 5 и гидромагистрали 3 и 6 в поршневые полости 2 гидроцилиндров 1 более нагруженньк колес, вьздв гая их, горизонтирует транспортное средство. Если продол1ьньй крен возн кает и после перераспределения всей жидкости, то сигнал поступает на золотники 14, переводя их в верхнее положение, и на включение источника I8 питания для подпитки гидропне моаккумуляторов 13. Давление рабоче жидкости возрастает, соответствующие колеса выдвигаются, дополнитель но позволяя транспортному средству сохранить горизонтальное положение. После устранения крена золотники 9 горизонтирования переходят в нейтральное положение, а золотники 14 сначала в нижнее положение для сброса избыточного давления, а зате в нейтральное положение. Источник 1 питания выключается. Сохранение транспортным средство горизонтального положения в попереч ной плоскости при движении вдоль склона или наезде на препятствие / обеспечивается следующим образом. При появлении крена, например на левый борт, сигнал поступает на включение источника 18 питания и на золотники 14, перемечая левый зо лотник в верхнее положение, а правый в нижнее. При этом давление в гидропневмоаккумуляторе 13 правого борта падает, втягивая колеса. Посл устранения крена левый золотник 14 перемещается в нижнее положение, а правый в верхнее, уравнивая таким образом давление в гидропневмоаккумуляторах 13 левого и правого бортов до исходного положения. Ис57точиик 18 питания после этого выключается. В случае потери одним или несколi кими колесами контакта с опорной поверхностью, например в случае зависания их над траншеей, возможна авария, так как колесо максимально выдвинутое в этом случае, может быть заклинено при дальнейшем движении транспортного средства. Чтобы избежать этого, срабатывает предохранитель ная система, ограничивающая максимальное перемещение колеса от двух соседних колес величиной, равной диаметр, колес. В этом случае подача в штоковые полости 7 гидроцилиндров 1 жидкости под давлением, равным давлению в гидропневмоаккумуляторах 13, недостаточно, так как си действующая на поршень со стороны поршневой прлости 2 не компенсируется силой со стороны штоковой полости 7 (нагрузка на колесо отсутствует) . Поэтому сигнал от датчиков перемещения колес (не показан) относительно друг друга включает источник 18 питания и перемещает золотник 14 в нейтральное положение, а золотник 9 колеса, превысившего предел перемещения относительно соседних колес, в верхн€;е положение. Жвдкость под высоким давлением от источника 18 питания, минуя предохранительный клапан 15, поступает через магистрали 10 и 8 в штоковую полость 7 гидроцилиндров 1 провалившегося колеса и заставляет его принять допустимое положение, т.е. остановиться на расстоянии половины диаметра от соседних. После этого сигнал от датчиков перемещения колес перемещает золотник 9 в нейтральное положение и давление в штоковой полости 7 падает, так как жидкость сливается в бак. В случае необходимости можно и при горизонтальном положении транспортного средства переключением золотников 9 горизонтирования и золотников 14 придать транспортному средству или отдельным его колесам требуемое положение. Например, переключив золотник 14 в нейтральное, а золотник 9 в нижнее положение, и включив источник питания, можно поднять колесо в любое требуемое положение или поднять его в максимально верхнее положение и зафиксировать там. Переключив золотники 14 в верхнее т. ложение можно поднять корпус транспортного средства, что может по-надо й-тгся при преодоленин брода. Перек к)ч||в золотники 14 в нижнее положенйе можно опустить корпус траяс портного средства на грунт для погрузки или маскировки. При превышении допустимого давления рабочей жидкости срабатывает пре цохранительный клапан 19 и истрч-- -; ник 18 питания работает п.о замкнутому циклу. Для очистки рабочей жидкости служит фильтр 20. В предлагаемой подвеске расширены функциональные возможности за счет дистанционного управления положением колес транспортного средства, независимо от наличия их контакта с опорной поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропневматическая подвеска транспортного средства | 1981 |
|
SU990551A1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2352474C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2352475C1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2599075C1 |
| Подвеска последовательно расположенных колес транспортного средства | 1985 |
|
SU1303444A1 |
| Устройство для блокировки балансирного моста транспортного средства | 1986 |
|
SU1437254A1 |
| Гидропривод стрелы экскаватора (его варианты) | 1983 |
|
SU1143814A1 |
| Ходовая часть гусеничного транспортного средства | 1986 |
|
SU1409515A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1967 |
|
SU202742A1 |
1. ТВДРОПНЕВМАТИЧЕСКАЯ УПРАВЛЯЕМАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА, содержащая смонтираванные между осями колес транспортного I средства и его.корпусом гчдррцилиндры, связанные своей одной рабочей полостью непосредственно, а другой через обратные клапаны и золотники горизонтирования с гцдромагистралями соответствующего борта транспортног-. го средства, которые через гвдро- пневмоаккумулятор, золотник управления км и источник питания св1язаны с резервуаром рабочей жидкости. отличающаяся тем, что, с целью расширения функциональных возможностей путем обеспечення дистанционного упра вления положе1шем каждого колеса вне зависимости от наличия его контакта с опорной поверхностью, она снабжена отдельными для каждого борта транспортного средства магистралями высокого давления, каждой из ко орых золотник управления соответствующего гидропневмоаккумулятора связан с золотниками горизонтировакия этого борта транспортного средства, и магистралями, связывающими золотники управления гцдропневмоаккумуляторами с резервуаром. . 2. Подвеска по rt. 1, о т л и - Ча ю ща я с я тем, что в каждой магистрали, связывакмцей соответствующий золотник управления гидроаккумулятора с резервуаром, установи лен предохранительный клапан. 3.Подвеска по п.I, о т л и ч а ющ а я с я тем, что каждый . золотник горизонтирования выполнен трехпознционным.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке №3232726/1, | |||
| кл | |||
| ,В 60 G 21/06, 09.01.81 | |||
| (прототип) | |||
