(5) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1979 |
|
SU830299A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| БСЕСОЮЭИАЛ ПДТЕНТЙ.ВTEKH^ECflAn БИ5Л^10Т?КА | 1972 |
|
SU331366A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Устройство для управления вентильным электродвигателем | 1989 |
|
SU1653119A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
t
Изобретение относится к автоматическому регулированию и может быть применено в станках с программным управлением, установках для изготовления интегральных микросхем, в полиграфических автоматизированных установках, в оптико-механических установках, в устройствах ввода-вывода и хранения информации в ЦВМ.
По основному авт.св. № 830299 известен регулятор, содержащий последо вательно соединенные первый сумматор, элемент сравнения, усилитель, исполнительный ключ, первый и второй широтно-импульсные модуляторы, первый вход первого ключа соединен с первым входом первого сумматора, через ждущий мультивибратор - со вторым входом первого ключа,а через дифференциатор с вторым входом первого широтно-импульсного модулятора, выход первого ключа соединен с вторым входом второго широт но-импульсного модулятора, последовательно соединенные второй сумматор и элемент реверса и последовательно соединенные триггер и второй ключ,выход которого соединен с вторым входом элемента сравнения, выход исполнительного механизма соединен с вторым входом второго ключа, вход и выход второго широтно-импульсного модулятора соединены соответственно с первыми входами второго сумматора и триггера и вторы10ми входами второго сумматора и триггера, вход первого ключа соединен с вторым входом элемента реверса, выходом подключенного к второму входу
первого сумматора 11.
ts
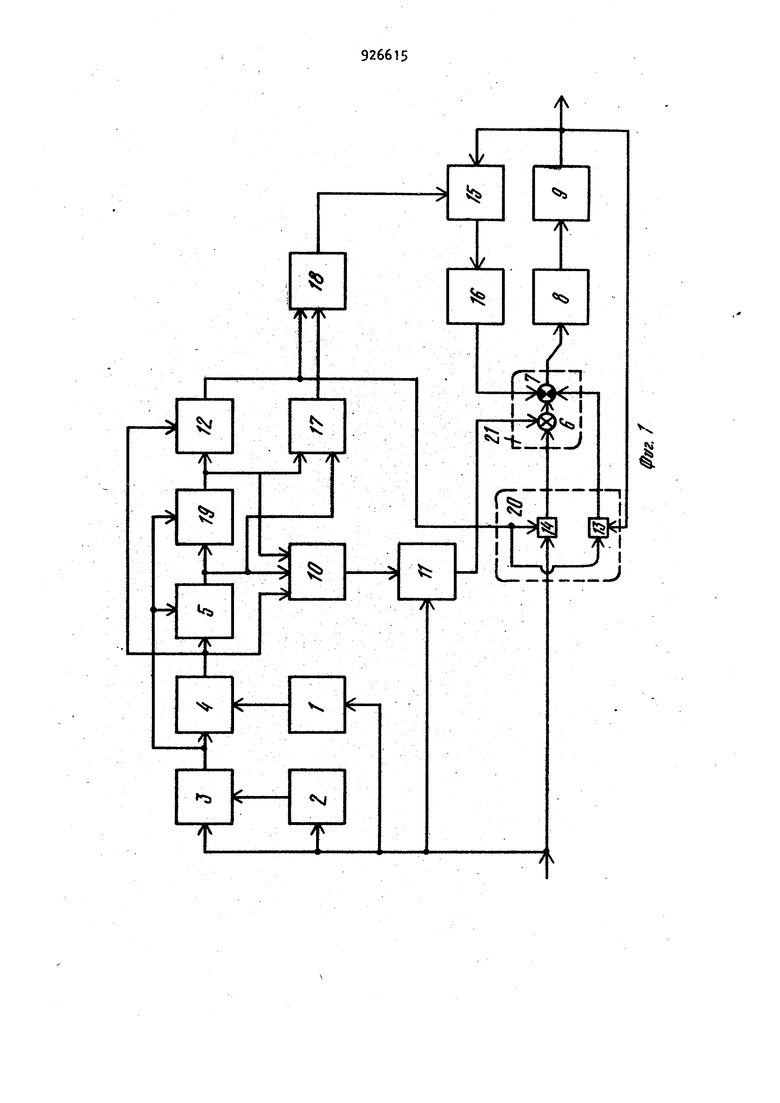
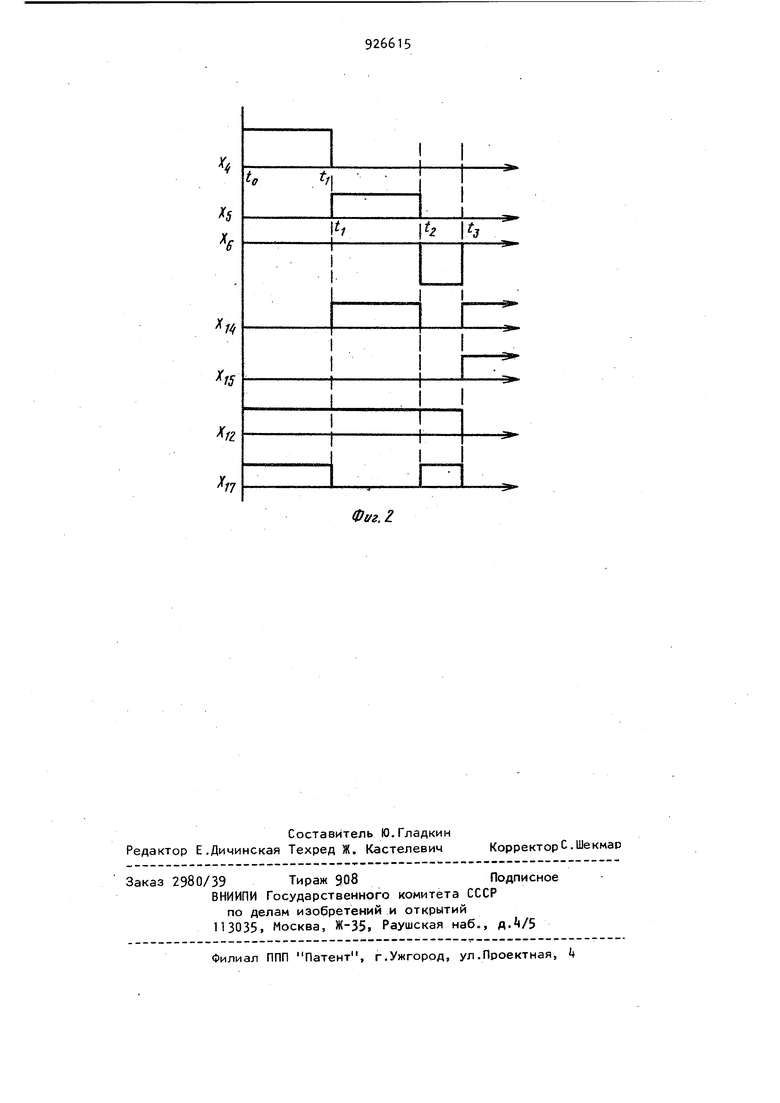
Недостатками известного регулятора являются его низкие динамические характеристики, это объясняется тем, что при подходе к заданной точке и при медленно меняющихся входных воз20действиях управление ведется только с помощью отрицательной обратной связи по положению, а также ограни- 4енная область применения, поскольку при отработке больших рассогласований скорость перемещения выходного вала исполнительного механизма не может бесконечно увеличиваться в силу его конструктивных особенностей. Цель изобретения - улучшение динамических характеристик и расширение области применения регулятора. Поставленная цель достигается тем, что в регуляторе дополнительно установлены третий широтно-импульсный модулятор, второй триггер, элемент И второй дифференциатор и третий и четвертый ключи, причем первый вход первого сумматора соединен с сигнальным входом первого ключа через третий ключ, выход второго широтно-импульсного модулятора соединен с вторым входом первого триггера через третий широтно-импульсный модулятор, второй вход которого соединен с выходом первого ключа, выход исполнительного механизма через последовательно соединенные четвертый ключ и второй дифференциатор соединен с третьим входом элемента сравнения, первый вход второго триггера соединен с выходом второго широтно-импульсного модулятора, второй вход - с выходом третье го широтно-импульсного модулятора и третьим входом второго сумматора, а выход - с первым входом элемента И, второй вход которого соединен с выходом первого триггера и управляющим входом третьего ключа, а выход - с управляющим входом четвертого ключа. На фиг.1 изображена блок-схема предлагаемого регулятора на фиг.2 временные диаграммы. Регулятор содержит первый дифференциатор 1, ждущий мультивибратор 2, первый ключ 3, первый и второй ши ротно-импульсные модуляторы k и 5 первый сумматор 6, элемент 7 сравнения, усилитель 8 ,исполнительный механизм 9 второй сумматор 10, элемен 11 реверса, первый триггер 12, второ третий и четвертый ключи второй дифференциатор 16, второй тригге 17, элемент И 18, третий широтно-импульсный модулятор 19, переключатель 20, суммирующее устройство 21 (X:,выходной сигнал i-ro функционального блока). Рассмотрим функции, выполняемые отдельными функциональными элементами регулятора. Ждущий мультивибратор 2 запускается по 1:1ереднему фронту скачка задающего воздействия, дифференциатор V выделяет передний фронт скачка задающего воздействия. Широтно-импульсные модуляторы k, и 19 фильтруют импульсы, длительность которых определяется амплитудой входного сигнала регулятора, первый и второй триггеры 12 и 17 совместно с элементом И 18 управления ключей . Элемент 11 реверса формирует управляющее воздействие с учетом полярности задающего воздействия. Устройство работает следующим образом. В первоначальном состоянии ключи 1 замкнуты, триггер 12 в состоянии О, а триггер 17 в состоянии 1. Ждущий мультивибратор 2 по переднему фронту скачка,задающего воздействие , открывает ключ 3 и на .его выход проходит сигнал, пропорциональный по амплитуде входному воздействию. Дифференциатор 1 по переднему фронту скачка задающего воздействие запускает широтно-импульсный модуля °Р который формирует импульс положительнои полярности с длительностью, зависящей от амплитуды скачка задающего воздействия. По переднему фронту сигнала с выхода широтно-импульсного модулятора k триггер 9 устанавливается в состояние 1, что соответствует размыканию ключей 13 15. Импульсы с выхода широтно-импульсного модулятора k через второй сумматор 10, элемент 11 реверса, первый сумматор 6, элемент 7 сравнения и усилитель 8 поступает на вход исполнительного механизма 9. При этом интервал (tg,t) будет соответствовать участку разгона, если X()Q, и участку торможения, если Х(, Эти операции выполняются элементом 8 реверса. 8 момент t по заднему фронту импульса с выхода широтно-импульсного модулятора Ц запускается широтно-импульсный модулятор 5 и триггер 17 через элемент И 18 замыкает ключ 15. Импульс с выхода широтно-импульсного модулятора 5 через сумматор 10 и элемент реверса поступает на вход сумматора 6. Таким образом, интервал (t,tn) будет соответствовать движению выходного вала исполнительного механизма 9 с установившейся скоростью. В момент t г, запускается широтноимпульсный модулятор 19, на выхо/je которого появляется импульс отрицательной полярности (интервал tn,t). По переднему фронту указанного импульса триггер 17 перебрасывается в состояние 1, что соответствует размыканию ключа 15. Этим обеспечивается торможение (разгон) вала исполниX4(t)0 тельного механизма 9, если (X(t)0). В момент t, . ij триггер танавливается в состояние О, ключи 13 - 15 замыкаются и в дальнейшем регулятор работает под действием сигналов скоростной и позиционной обратных связей. При медленно меняющихся задающих воздействиях регулятора на выходе ключа 3 нулевой сигнал, ключи замкнуты и регулятор работает по принципу отрицательных обратных связей. Предлагаемый регулятор обеспечивает переходные процессы, близкие к оптимальным по быстродействию при существенных ограничениях на фазовые координаты. Регулятор позволяет также улучшить динамические характеристики системы при медленно изменяющихся входных воздействиях, заключающие;СЯ в повышении быстродействия на и точности на 1,§. Отработка ступенчатых входных воздействий происходит при ограничении на скорость перемещения, при этом улучшаются энергетичес-30
кие характеристики систем, в которых применяется предпагаемый регулятор, т.е. уменьшается их энергоемкость почти на 3. Отрицательная обратная связь по скорости на участках дт4Жёния с постоянной скорост ыд является стабилизирующей и в полтора раза уменьшает чувствительность регулятора к параметрическим возмущениям. Приподходе к точке позиционирования елияние обратных связей способствует (5о12 устретьего широтно-импульсного модулятора и третьим входом второго.сумматора, а выход - с первым входом элемента И, второй вход которого срединен с выходом первого триггера и управляющим входом третьего ключа, а выход с управляющим входим четвертого ключа.
HcTOviHHKH информации, принятые во внимание при экспертизе
t. Авторское свидетельство СССР N830299, кл. G 05 В П/Й, 13.07.79,. лее быстрой (примерно на 6%) стабилизации регулятора. Формула изобретения Регулятор по авт.св. № 8302Э9, отличающийся тем, что, с целью улучшения динамических характеристик и расширения области применения регулятора, в нем дополнительно установлены третий широтно-импульсный модулятор, второй триггер, элемент И, второй дифференциатор и третий и четвертый ключи, причем первый вход первого сумматора соединен с сигнальным входом первого ключа через третий ключ, выход второго широтноимпульсного модулятора соединен с вторым входом первого триггера через третий широтно-импульсный модулятор, второй вход которого соединен с выходом первого ключа, выход исполнительного механизма через последовательно соединенные четвертый ключ и второй дифференциатор соединен с третьим входом элемента сравнения, первый вход второго триггера соединен с выходом второго широтно-импульсного модулятора, второй вход - с выходом
Фиг. 2.
