Изобретение относится к автс атическому регулированию, а именно к аналоговым пропорционально-интегральводифферен1шальным (ПИД) устройствам управления, и может быть использовано Кри автоматизации различных производственных процессов.
Известно аналоговое регулирующее устройство, формирующее ПИД закон регулирования и дополнительно содержащее переключатели режимов работы и узел для так назьтаемого безударного переключения с ручного режима на автоматический и обратноCli
Однако известное устройство имеет сложную взаимозависимую связь между динамическими параметрами настройки, что делает его сложным в эксплуаташга и менее точным.
Известно также аналоговое регулирующее устройство, формирующее М -еакон регулирования и содержащее интегратор, выходной усилитель, переключатель режимов работы, обеспечивающий безударное переключение 12 .
Указанное ус1ройство не содержит пропорционально-дифференциального звена (ПД-звена), что снкнгает его функциональные возможности.
Наиболее бяизкиь по технической сущности к предлагаемому является блок регуШ руюш.кй аналоговый, содержащий первый сумматор, ПД-ввено, интегратор, второй сумматор, конденсатор, блок пе« реключателей, выход первого сумматора соединен с входом ПД-звена и первым :входом интегратора, выходы Щ1.-ззена я интегратора соедш е1-гы соответственно с первым и вторым входами второго сумматора, выход которого через конден (затор соедшюн с вторьш входом интегратора и замыкающими контактами блока переключателей, размыкаюнда-й контакт ко-горого соединен с третьим входом интегратора.
В положении переключателя ручное травление интегратор преврашается в усилительное звено, так как инвертиру зощий вход усилителя оказьгоае-тся подключенным к общей штше (земле). При 5ЯЮМ звено, cyMMainp и конденсатор обjjaayioT интегратор для входных сигнагюв ручного управления З .
Для дшшого регулятора характерна ненадежная работа в режиме ручного ЭИравления, заключающаяся в том что в случае выхода из строй аадагчтка регулируемого параметра или датчика параNteTpa или при обродве линии связи с
датчиком или задатчиком регулятор не может удержать установленного значения выходного ситнала, что приводит к нарутадению технологического процесса.
Выходной сигнал Ug,, этого регулятора определяется выражением
-8ЫХ- д - 2 и)
и
к,
1 - коэффишгент передачи
де второго сумматора по входу, подключенному к Ш.-ввену{
К„ )ициент передачи второго сумматора по входу, подюшзченномз к 1штегратО
РУ
-выходной сигнал ПД- вена,
и и,
ПА
-выходной с догнал штеграто-У
ра.
Учитывая то, что при резких изменениях сигнала на входе ПД-звена, а следс вательно, и на входах первого сумматоре., подключенных к задат 1кку параметра и датчику параметра,, а также при их отказах, на выходе ПД-овена устанавливает ся максимальный сигнал + (J , равный напряжению насыщения микросхемы. Из (1) можно определить требуемое значение выходного сигНала т-штегратора
(2)
(и„и,. + к,и.
(2:
)фициент передачи К,, в регуляторе равен 1. Выходной сигнал интегрсхтора и для установки выходного реп/лятора bg,.,. U при макс дала льном значения вых.одного сигнала ПД- звена равен
и
и
ISBfeiK moiT.
м
.2 и
:з)
л moix 1
м
Выходной сигнал {штегратора также может изменяться -только до U,vi , следовательно, рет лятор не обеспея5{вает ма- дежной работы во 1юем дтшлазоне изменеH «j выходного сигнала, что приводит к нарушению технолог ического процесса. Для преду1 резкдения .нарушений т-ехнологияеского процесса, вызванных ненадежной работой регулятора, в этих с тучаях тре еа-ся вр-едение дополнительно резервного ручного з }датчика и блоки р - чногчэ управления.
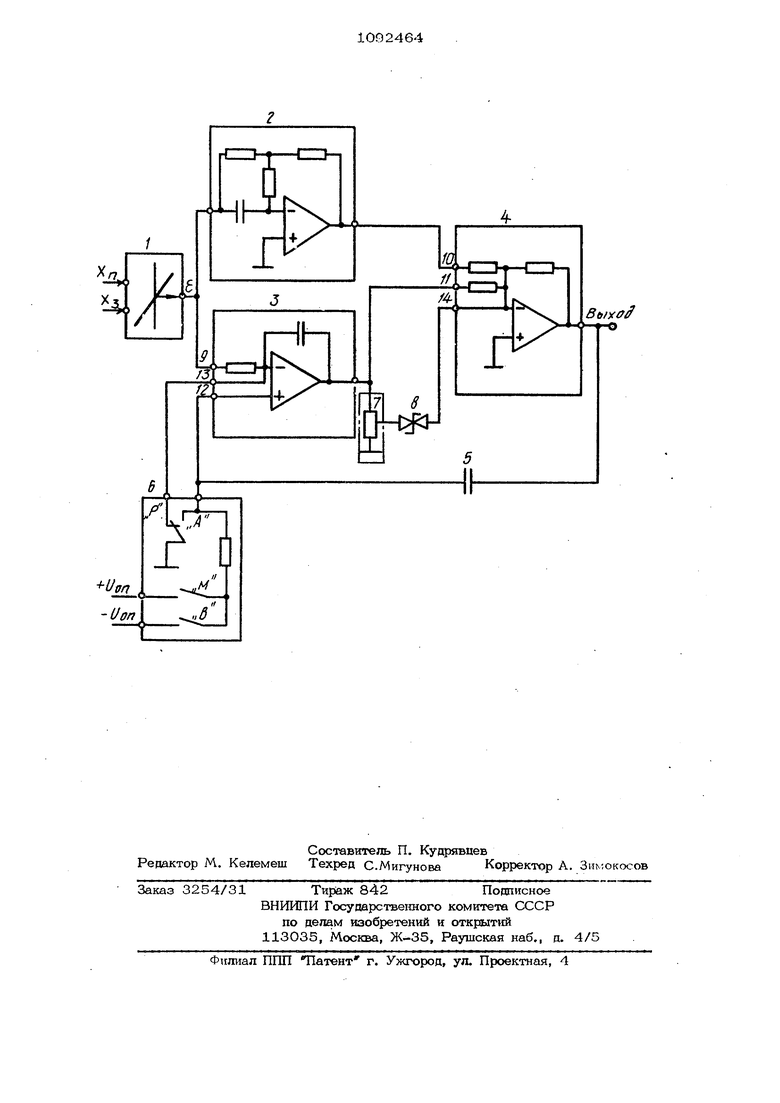
Как видно из формулы (2), значение выходного интегратора IJ; можно згменьшиттл до и,,, пу-тем увеличения коэффициента передачи Kj входа сумматора, подкл1оче}пюго к выходу интегратора, но в этом случае необходимо в К , раз увеличить постоянную времени интегрирования интегратора для автоматического режима работы регулятора, что потребует увеличения во столько же раз номиналов резисторов или конденсаторов интегратора. В первом случае это приводит к ухудшению метрологических характеристик регулятора, а во втором - к увеличению его габаритов. Цель изобретения - повышение надежности ре1улятора. Цель достигается тем, что в регулятор, содержащий первый сумматор, nponop ционально-диффере)11шальное звено, 1штегратор, второй сумматор, конденсатор, блок переключателей, причем выход первого сумматора соедгаюн с входом пропор ционально-дифференциального звена н первым входом Ш1тегратора, выходы ГЩзвена и Ш1тегратора соединены соответст вонно с первым и вторым входами второго сумматора, выход которого через конденсатор соединен с вторым входом интегратора и замыкающими контактами блока переключателей, размьисающий контакт которого соединен с третьим входом интегра тора, введены делитель напряжения и нелинейный элемент, нгшример стабилитрон, причем делитель напряжения соедршен с выходом интегратора, а нелинейный элемент одним выводом соединен со средней точкой делителя напряжения, а другим с третьим входом второго сумматора. На чертеже приведена схема предлагаемого регу штора. Регулятор содержит первый сумматор 1 ГЩ-звено 2, интегратор 3, второй сумматор 4, конденсатор 5, блок 6 переключате лей с замыкающими и размыкающими контактами, делитель 7 напряжения и нелшюй ный элемент 8, например стабилитрон., Регулятор работает следующим образом Режим автоматического управления. Сигналы задания Х и параметра Хц поступают на входы первого сумматора 1, на выходе которого формируется сигнал рассогласования . Сигнал рассогласова ния Е поступает на вход ПД-звена 2 и первый вход 9 интегратора 3, выходные сигналы которых соответственно поступают на первый 10 и второй 11 входы второго .сумма тора 4.Па выходе последнего формируется -управляющий сигнал в соответствии с ПИД-законом регулирования. В автоматическом реж1а1е управления пе64рокяючатель режимов в бло:сс 6 пороклю- чателой находится в положении А, следовательно, второй вход 12 (нешгоертирующий) интегратора 3- соедшген с общей Переключение с автомат1гческого режттма управления на ручное осушествляетсл уста ювкой переключателя режикюг в бпоке 6 переключателей в положение Р, при этом третий вход 13 шгтегратора 3 подключается к общей , а выход второго сумматора 4 через конде1{сатор 5 соедтшвтся со вторым входом 12 miTorpaтора 3, образуя аналоговый штегратор для с ггналов ручного управления +U, - U поступающюЧ на вход sfflTerpaTopa ручного управления через замыкающие контакты М гли Б блока 6 переключателей. Переключение с автоматического режи-v. ма управления на ручное осуществляется бузударно с сохранением величины выходного сигнала второго сумматора 4 в момент переключешш режима. Это обеспеч1гвается тем, что конденсатор 5 при aBTOMaTvraecKOM управлении заряжается до велтгчины выходного второго сумматора 4, В момент переключения с автомат1гческого управления на ручное напряжение на конденсаторе 5, а следовательно, и на выходе второго сумматора сохраняе1х;я независимо от нашетия сигнала на первом входе 1О второго сумматора 4 с выхода ПД-звена 2, Выходной ciirnaa ПД- звена 2 KON пенсируется обратной связью через конденсатор 5 и усилитель с разомкнуахэй обратной связью интегратора 3, В режиме ручного таравлен11я регулятором можно управляаъ только сгагналами ручного управлетю. Переключение с управления на автомат1гческое также происходит безударно, так как конденсатор в интеграторе 3 при управлении включен между общей шиной и выходом усилителя и заряжается до такой ве.шгннты, что при переключенш на автомат-иеское управление аягебрсниеская сумма лов 2 к интегратора 3 не изменяет предыдущего значения выходного сигнала второго сумматора 4, Ном1шаль)1Ый диапазон изменения втлходного сигнала i узлов регул ято.ха, вьтолненных на операшюнных усилителях, находится в пределах от мшгус 6Г7О до плюс 60-70% максимального значения выходного сигнала U . Дел11тс.ль 7 напряжения настроен таким образом, что откраьюание нелинейного элемента 8 происходит при напряжении на выходе интегратора 3, находшцемся в пределах больше Uu , но меньше U следовательно, введенные в схему регулятора делитель 7 напряжения- и нелинейный элемент 8 не влияют на работу регулято ра в автоматическом режиме, а также в режиме ручнсйг-о управления, если выходное напряжение интегратора 3 находится в пределах номинального диапазо на изменения выходного сигнала. Допустим, что регулятор находится в режиме ручного управления, сигнал задания Х равен сигнаду параметра Л и на выходе второго сумматора 4 сигна равен, например, плюс U , след«жательно, на выходе первого сумматора 1 и воыходе ГЩ-ввена 2 выходное напряжение равно нулю, а выходное напряжение интегратора 3, как следует из формулы (2), равно минус .(J . При отказе датчика параметра на выходе первого сумматора 1 устанавливается сигнал минус и , что приводит к появлению на ныходе ГЩ-авена сигнала плюс U с последующим спадом значения плюс U, Изменение выходного сигнала интегратора 3 при этом направлено на компен- санию выходного сигнала ГЩ-овена 2, т.е. выходной сигнал интегратора 3 при нщиает более отрицательное значение, что приводит к открыванию нелинейнохч) элемента 8 и увеличению коэффициента передачн сигнала с выхода интегратора 3 на выход второго сумматора sa счет вступления в работу дополнительного 1шнала, образованнсзго делителем 7 напржкения и нелинейным эяементдал 8. В этом случае козффишгент передачи сиг ;наиа с выхода интегратора 3 определяется йо (формуле где Kjzl- коэффициент передачи сумматора 4 ло входу 11, подклк ченн 1у к интегратору 3J К - коэффициент передачи сумматора 4 по допогаительному каналу (вход 14)-, Коэффициент передачи по дополнительному каналу К определяется выражением, вьшод которого не приводится где и - выходное напряжение интегратора 3; Ug - напряжение открывания нелинейного элемента 8; fb - коэффициент передачи делителя 7-; R. г. 4- Гр- суммарное сопротивление делителя 7 напряжения и нелинейного элемента 8, сспротшзление обратной связи второго сумматора 4. Как видно из выражения (6), коэффициент передачи К с повышением напряжения Up резко возрастает, что позволяет скомпенсировать сигнал ПДзвена 2 при незначительном увеличении выходного сигнала интегратора 3, Таким образом, введение де;ттеля напряженая и нелинейного элемента в регулятор исключает возможность потери ф5тшпш ручного управления и обес. печивает ссйсранение заданного значения выходного сигнала регулятора при возникновении неисправности во внешних цепях регулятора, что повышает надежность регулятора в целом, а следовательно, и системы регулирования и исключает возможность нарушения технологического нродесса.


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Устройство для управления приводом шахтной подъемной машины | 1987 |
|
SU1447743A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
| Регулятор для источника переменного напряжения | 1982 |
|
SU1144184A1 |
| Асинхронное устройство для управления вентильным преобразователем | 1981 |
|
SU964958A1 |
РЕГУЛЯТОР, содержащий первый сумматор, пропорционально-дифференциальное звено, интегратор, второй сумматор, блок переключателей, выход первого сумматора соединен с входом пропорционально-дифференциального звена и первым входом интегратора, выходы пропорционально-дифференциального звена и интегратора соединены соответственно с первым и вторым входами второго сумматора, выход через конденсатор соедтшен с вторым входом интегратора и замыкающи-ми контактами блока переклю-чателей, размыкающий контакт которотх соединен с третьш.1 входом интегратора, отличающийся тем, что, с целью повышения надежности регулятора, в него введены делитель напря- «д жения и нелинейный элемент, причем Рдаяи-Длтель напряжения соед1шен с выходом ин- fwiF тегратора,. нелинейный элемент одни.} выводом соед1шен со средней точкой де лителя напряжения, a другим - с треть- S им входом второго сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аналоговое регулирующее устройство | 1973 |
|
SU643828A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Техническое описание | |||
| Ивано-Франковский приборостроительный завод (прототип). | |||
