Изобретений относится к управлению шахтным подъемом и может быть использовано для управления тормозом шахтных подъемных машин и лебедок.
Цель изобретения - повышение надежности и безопасности эксплуатации подъемной машины.
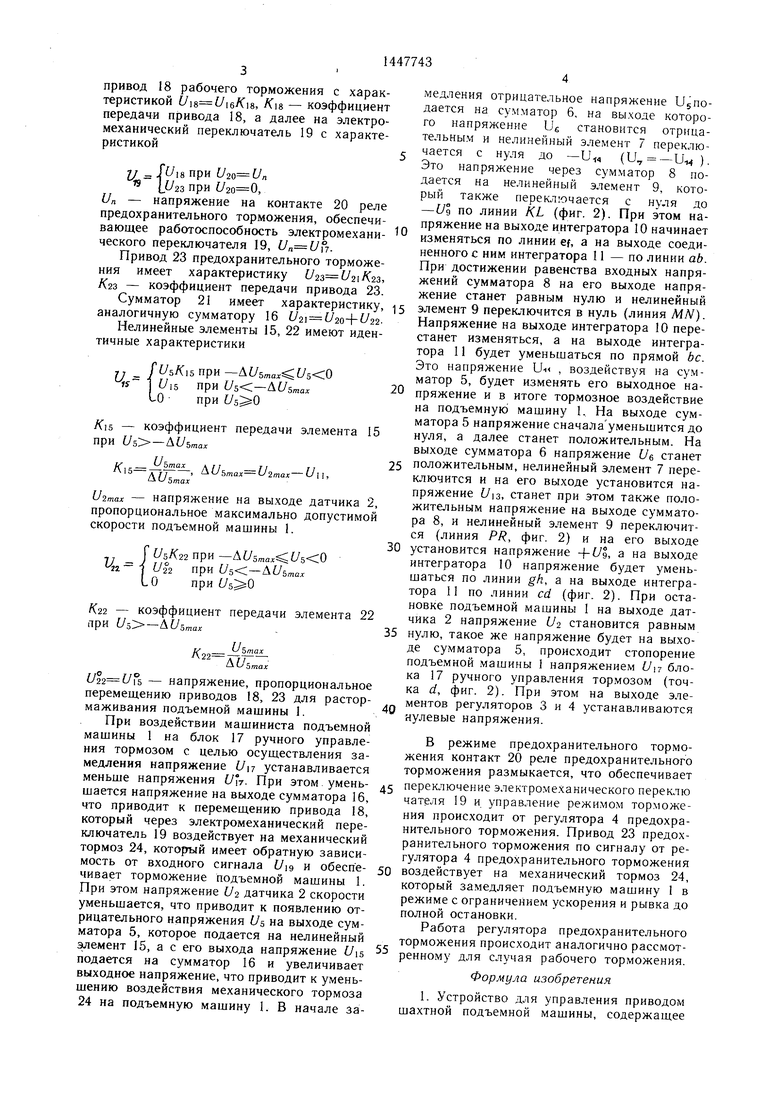
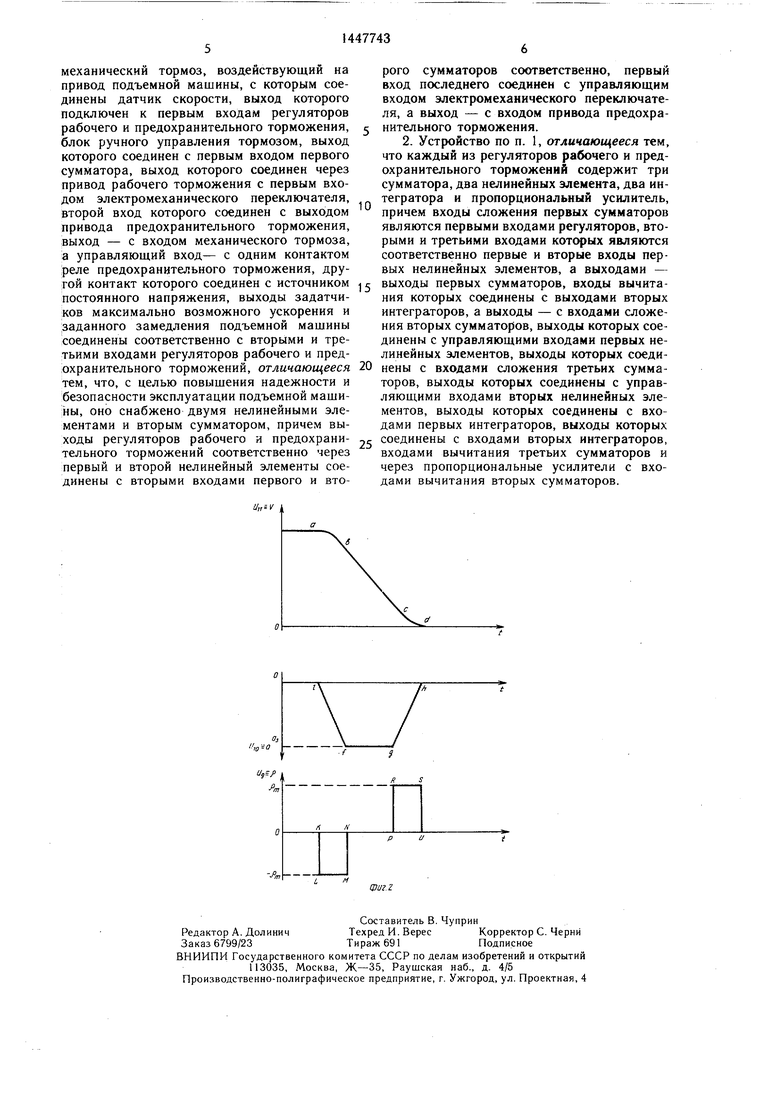
На фиг. 1 приведена структурная схема устройства для управления приводом шахтной подъемной машины; на фиг. 2 - диаграммы скорости, ускорения и рывка (приняты обозначения UT- напряжение на п выходе г -го блока).
Устройство для управления приводом шахтной подъемной машины (фиг. 1) содержит подъемную машину 1, соединенной с датчиком 2 скорости, выход которого соединен с входами регулятора 3 рабочего торможения и регулятора 4 предохранительного торможения. Регулятор 3 рабочего торможения содержит сумматоры 5 и 6, нелинейный элемент 7, сумматор 8, нелинейный элемент 9, интеграторы 10 и 11 и пропорциональный усилитель 12.
Кроме того, устройство содержит задат- чик 13 максимального ускорения и задат- чик 14 замедления. Выход регулятора 3 : рабочего торможения подключен через нелинейный элемент 15 со вторым входом сумматора 16, первый вход которого соединен с блоком 17 ручного управления тормозом, а выход - через привод 18 рабочего торможения с первым входом электромеханического переключателя 19, управляющий вход которого соединен через контакт 20 реле предохранительного торможения с источником постоянного напряжения, а также первым входом сумматора 21, второй вход которого через нелинейный элемент 22 соединен с выходом регулятора 4 предохранительного торможения, а выход - через привод 23 предохранительного торможения со вторым входом электромеханического переключателя 19, выход которого соединен с механическим тормозом 24, который воздействует на подъемную машину 1. Регулятор 4 предохранительного торможения, как и регулятор 3, содержит аналогичные сумматоры 25 и 26, нелинейный элемент 27, сумматор 28, нелинейный элемент 29, интеграторы 30 и 31, пропорциональный усилитель 32.
Пос.чольку элементы 5-15 регулятора 3 аналогичны соответствующим элементам 25-32 регулятора 4, то для упрощения описания работы устройства рассматривается работа элементов 5-12 регулятора 3.
Устройство работает следующим образом.
В установившемся режиме подъемной машины 1 напряжение (j с выхода датчика 2 скорости подается на регулятор 3 рабочего торможения 3 и регулятор 4 предохранительного напряжения, а именно на сумматор 5с характеристикой . На выходе сумматора 5 напряжение i/s будет равно нулю, так как напряжение действительной
скорости f/2 и заданной скорости L n примерно равны. Напряжение t/s через сумматор 6 с характеристикой i/6 f/5-f : поступает на нелинейный элемент 7 с харак- теристикой
( при f/e О при f/i6 - L/14 При L
0 О при
Задатчиком 13 максимального ускорения устанавливается напряжение t/is, пропорциональное максимально возможному ускорению йт подъемной машины 1, ат, задатчиком 14 заданного замедления
устанавливается напряжение Ui4, пропорциональное заданному замедлению, необходимому по условиям технологии работы подъемной машины 1, . В процессе работы i/13 и t/H для принятой подъемной машины практически не изменяются. Напряжение Uj через сумматор 8 с характеристикой U Uj-f/io подается на нелинейный элемент 9 с характеристикой
25
/ + /9При У 0 9 Оо при
L -U9 при
Напряжение Щ пропорционально величине ограничиваемого рывка (), которое выбирается в зависимости от параметров подъемной машины 1 по условиям минимальных динамических нагрузок.
В процессе работы напряжение Vg не изменяется для данной подъемной машины, оно подается на интегратор 10 с характеристикой .Qllgt, где /Сю - коэффициент передачи интегратора 10, гг-р--, t/iomax - максимально вози ютах Л Г1
можное напряжение на выходе интегратора 10, и пропорционально максимальному ускорению , /С| 1 - коэффициент передачи интегратора 11.
Напряжение б/ю, пропорциональное заданному ускорению, подается на интегратор 11 с характеристикой , /Си -
ап, и,з
Пропорциональный усилитель 12 имеет характеристику i/i2 f io/Ci2, где /Сг2 - коэфVфициент передачи усилителя 12, /С|2 ;ггг АIО
Как видно регуляторы 3 и 4 обеспечивают формирование заданного закона изменения скорости в виде напряжения Un с ограничением величин ускорения и рывка. В установившемся режиме с блока 17 ручного управления тормозом снимается напряжение и°7, которое через сумматор 16 с характеристикой fy i6 f i7-4-f i5 подается на
привод 18 рабочего торможения с характеристикой t/i8 f/i6- Ci8, /Ci8 - коэффициент передачи привода 18, а далее на электромеханический переключатель 19 с характеристикой
/ fOis при
« и
и23 при ,
Un - напряжение на контакте 20 реле предохранительного торможения, обеспечивающее работоспособность электромехани- ческого переключателя 19, .
Привод 23 предохранительного торможения имеет характеристику .23, К.23 - коэффициент передачи привода 23.
Сумматор 21 имеет характеристику, аналогичную сумматору 16 t/2i f/2o+f/22.
Нелинейные элементы 15, 22 имеют идентичные характеристики
,, / /5/С15ПрИ-А 5тадг /5 0 ЧУ 1 Uib при 65 -Af/Sma :
LO при /Ci5 - коэффициент передачи элемента 15
при (/5 -Af/5max
, ,max U2max-U, f USmax
Uzmax - напряжение на выходе датчика 2, пропорциональное максимально допустимой скорости подъемной машины 1.
Г 5Л:22ПрИ-А/75ша /5 0 1 U22 при f/5 -Af/5max
LO при
/(22 - коэффициент передачи элемента 22
при f/5 -А Уэтад:,
т и (пах
.
- напряжение, пропорциональное перемещению приводов 18, 23 для растор- маживания подъемной мащины 1.
При воздействии машиниста подъемной машины 1 на блок 17 ручного управления тормозом с целью осуществления замедления напряжение Un устанавливается меньше напряжения U T. При этом умень- шается напряжение на выходе сумматора 16, что приводит к перемещению привода 18, который через электромеханический переключатель 19 воздействует на механический тормоз 24, который имеет обратную зависимость от входного сигнала и обеспе- чивает торможение подъемной машины 1. При этом напряжение Uz датчика 2 скорости уменьшается, что приводит к появлению отрицательного напряжения /Уо на выходе сумматора 5, которое подается на нелинейный элемент 15, а с его выхода напряжение подается на сумматор 16 и увеличивает выходное напряжение, что приводит к уменьшению воздействия механического тормоза 24 на подъемную машину 1. В начале за
5
0
5
0
5
0
медления отрицательное напряжение Ugno- дается на сумматор 6, на выходе которого напряжение Ug становится отрицательным и нелинейный элемент 7 переключается с нуля до (U, -Un). Это напряжение через сумматор 8 подается на нелинейный элемент 9, который также переключается с нуля до -UI по линии KL (фиг. 2). При этом напряжение на выходе интегратора 10 начинает изменяться по линии ef, а на выходе соединенного с ним интегратора 11 - по линии аЬ. При достижении равенства входных напряжений сумматора 8 на его выходе напряжение станет равным нулю и нелинейный элемент 9 переключится в нуль (линия MN). Напряжение на выходе интегратора 10 перестанет изменяться, а на выходе интегратора 11 будет уменьшаться по прямой be. Это напряжение l , воздействуя на сумматор 5, будет изменять его выходное напряжение и в итоге тормозное воздействие на подъемную машину 1. На выходе сумматора 5 напряжение сначала уменьшится до нуля, а далее станет положительным. На выходе сумматора 6 напряжение t/e станет положительным, нелинейный элемент 7 переключится и на его выходе установится напряжение , станет при этом также положительным напряжение на выходе сумматора 8, и нелинейный элемент 9 переключится (линия PR, фиг. 2) и на его выходе установится напряжение -}-U, а на выходе интегратора 10 напряжение будет уменьшаться по линии gk, а на выходе интегратора 11 по линии cd (фиг. 2). При остановке подъемной машины I на выходе датчика 2 напряжение U становится равным нулю, такое же напряжение будет на выходе сумматора 5, происходит стопорение подъемной машины 1 напряжением f/i блока 17 ручного управления тормозом (точка d, фиг. 2). При этом на выходе элементов регуляторов 3 и 4 устанавливаются нулевые напряжения.
В режиме предохранительного торможения контакт 20 реле предохранительного торможения размыкается, что обеспечивает переключение электро.механического переклю чателя 19 и управление режимом торможения происходит от регулятора 4 предохранительного торможения. Привод 23 предохранительного торможения по сигналу от регулятора 4 предохранительного торможения воздействует на механический тормоз 24, который замедляет подъемную машину 1 в режиме с ограничением ускорения и рывка до полной остановки.
Работа регулятора предохранительного торможения происходит аналогично рассмотренному для случая рабочего торможения.
Формула изобретения
1. Устройство для управления приводом шахтной подъемной машины, содержащее
механический тормоз, воздействующий на привод подъемной машины, с которым соединены датчик скорости, выход которого подключен к первым входам регуляторов рабочего и предохранительного торможения, блок ручного управления тормозом, выход которого соединен с первым входом первого сумматора, выход которого соединен через привод рабочего торможения с первым входом электромеханического переключателя, второй вход которого соединен с выходом привода предохранительного торможения, выход - с входом механического тормоза, а управляющий вход- с одним контактом реле предохранительного торможения, другой контакт которого соединен с источником постоянного напряжения, выходы задатчи- ков максимально возможного ускорения и заданного замедления подъемной мащины соединены соответственно с вторыми и третьими входами регуляторов рабочего и пред- охранительного торможений, отличающееся тем, что, с целью повышения надежности и безопасности эксплуатации подъемной машины, оно снабжено двумя нелинейными элементами и вторым сумматором, причем выходы регуляторов рабочего и предохранительного торможений соответственно через первый и второй нелинейный элементы соединены с вторыми входами первого и вто0
рого сумматоров соответственно, первый вход последнего соединен с управляющим входом электромеханического переключателя, а выход - с входом прнвода предохранительного торможення.
2. Устройство по п. 1, отличающееся тем, что каждый из регуляторов рабочего и предохранительного торможений содержит три сумматора, два нелинейных элемента, два интегратора и пропорциональный усилитель, причем входы сложения первых сумматоров являются первыми входами регуляторов, вторыми и третьими входами которых являются соответственно первые и вторые входы первых нелинейных элементов, а выходами - выходы первых сумматоров, входы вычитания которых соединены с выходами вторых интеграторов, а выходы - с входами сложения вторых сумматоров, выходы которых соединены с управляющими входами первых ие- линейных элементов, выходы которых соеди- 0 йены с входами сложения третьих сумматоров, выходы которых соединены с управляющими входами вторых нелинейных элементов, выходы которых соединены с вхо дами первых интеграторов, выходы которых соединены с входами вторых интеграторов, входами вычитания третьих сумматоров и через пропорциональные усилители с входами вычитания вторых сумматоров.
5
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство определения параметров движения шахтных подъемных машин при аварийном торможении | 1990 |
|
SU1754612A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
Изобретение относится к технике управления шахтным подъемом, может быть использовано для управления тормозом шахтных подъемных машин и лебедок и позволяет повысить надежность и безопасность эксплуатации подъемной машины. Для этого в устройство, содержащее подъемную машину (ПМ) 1, датчик 2 скорости, регуляторы рабочего 3 и предохранительного 4 торможения, механический тормоз 24, задатчики максимально возможного ускорения 13 и заданного замедления 14, блок 17 ручного управления тормозом, сумматор 16, приводы рабочего 18 и предохранительного 23 торможения, электромеханический переключатель 19 и контакт 20 реле предохранительного торможения, дополнительно введены два нелинейных элемента 15 и 22 и второй сумматор 21. С датчика 2 сигнал поступает на регуляторы 3 и 4, в которых обрабатывается в зависимости от соотношения с сигналами задатчиков 13 и 14. В режиме рабочего торможения контакт 20 замкнут. Поэтому управление тормозом 24 идет как от регулятора 3 через элемент 15, ограничивающий скачок управляющего сигнала, сумматор 16, привод 18 и переключатель 19, так и от блока 17 путем уменьшения его выходного напряжения, поступающего на один из входов сумматора 16. В режиме предохранительного торможения контакт 20 разомкнут, что обеспечивает переключение переключателя 19. Управление тормозом 24 происходит от регулятора 4 через элемент 22, ограничивающий скачок управляющего сигнала, сумматор 21, привод 23 и переключатель 19. 1 з.п.ф-лы, 2 ил. (Л 4 4ik 4 СО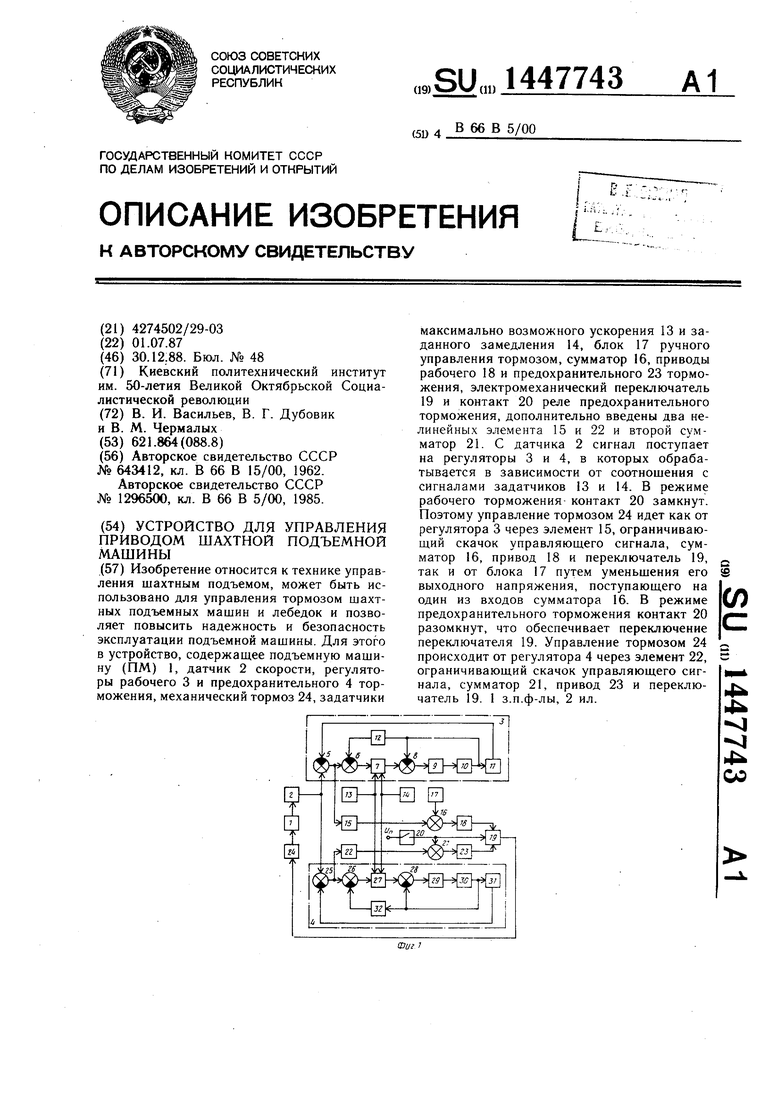
,
д,
| Устройство для управления приводом шахтных подъемных машин | 1972 |
|
SU643412A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
