со
00 4
О
Изобретение относится к автоматизации технологических процессов в машино- и приборостроении, в частности к средствам автоматизации операций свинчивания.
Известен гайковерт для завинчивания болтов, содержащий привод вращения шпинделя, выполненного полым и несущим на конце механизм поштучной вьщач болтов С 11 .
Недостатками этого устройства является невозможность завинчивания винтов и низкая производительность.
Известен также винтоверт, содержащий корпус с расположенным на нем приводом перемещения пшинделя в виде силового цилиндра, привод вращения шпинделя с инструментом, механизм поштучной вьщачи винтов с отсекателем и ориентирующими губками, кинематически связанными со шпинделем посредством кулачкового механизм 12
Недостаток известного винтоверта - низкая производительность.
Цель изобретения - повьш1ение производительности сборки.
Указанная цель достигается тем, что в винтоверте, содержащем корпус, привод перемещения полого шпинделя, привод вращения шпинделя с инструментом, механизм поштучной вьщачи винтов с отсекателем и ориентирующими губками, кинематически связанными со шпинделем посредством кулачкового механизма, инструментотвертка эксцентрично смонтирована на шпинделе и расположена между отсекателем винтов и ориентирующими губками, при зтом отвертка вьтолнена подвижной относительно шпинделя и К1шематически связана с корпусом вкятоверта.
На фиг.1 изображено устройство в исходном положении, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - положение элементов устройства в нижнем рабочем положении.
Бинтоверт состоит из червячного редуктора 1, в колесе 2 которого установлена обойма 3 с помощью гайки 4. В обойме 3 расположен патрон 5, в пазах которого размещены на осях 6 двуплечие рьгчаги 7, имеющие возможность вращаться относительно осей 6 за счет пружин 8, и на оси 9 одноплечий рычаг 10, имеющий также возможность вращения относительно оси 9 за счет пружины 1.1 . В патроне 5 установлен направляющий наконечник 12, выполненный в вдце трубки с фланцем, по которой винты подаются в зону сборки, причем наконечник 12 имеет возможность перемещаться в продольном направлении относительно патрона 5 за счет пружины 13, расположенной в патроне 5 и упирающейся одним концом во фланец трубки, а другим - во втулку 14, свинченную в патрон 5. Последний вместе с наконечником 12 имеет, в свою очередь, возможность перемещаться в продольном направлении относительно обоймы 3 за счет пружины 15. В наконечнике 12 выполнены продольные пазы под рычаги 7 и 10 и расположенные соосно с соответствующими пазами в патроне 5. Длина пазов в наконечнике 12 выбрана с учетом величины относительного перемещения патрона 5 и наконечника 2в процессе работы устройства. Вращение от червячного колеса 2 передается обойме 3 и патрону 5 через шпонку 16. Вращение на наконечник 12 передается через рычаги 7 и 10. На обойму 3 навинчена насадка 17 переменного профиля. На наконечнике 12 крепится упорная втулка 18 с плоскими пружинами 19, предназначенными для удержания винта от выпадания в исходном положении.
Привод вертикальной подачи подвижных элементов устройства выполнен в виде Цневмоцилиндра 20, закреплен- « ного на редукторе 1. Подвод сжатого воздуха в рабочую полость цилиндра осуществляется через штуцер 21. В поршне 22 установлен радиально-упорный подшипник 23, через внутреннее кольцо которого усилие от поршня передается на втулку 14 и патрон 5. Винты к сборочному устройству подаются из вибробункера через гибкий шланг (не показан) в направляющий наконечник 12.
Винтоверт работает следующим образом.
В исходном положении устройство находится на сборочной позиции. Подаются команды на перемещение поршня 22 вниз одновременно с командои на вращение червячного колеса 2. Воздух от пневмораспределителя (не показан) поступает в верхнюю (рабочую) полость пневмоцилиндра 20. Поршень 22, преодолевая сопротивление пружины.)5,идет вниз. Патрон 5 вместе с наконечником также перемещается вниз до упора втулки 18 в ограничивающую часть 24 насадки 17. Продольное перемещение наконечника 12 прек ращается. В это время происходит взаимодействие винта с сопрягаемым отверстием и частичное его наживление. Поршень 22, встречая дополнительное сопротивление прулашы 13, замедляет ход (происходит демпфирование). При дальнейшем перемещении патрона 5 вниз рычаги 7 находят на конусный профиль 25 насадки 17 и разворачиваются: верхние плечи расходятся, а нижние сходятся. Очередной винт, под действием собственного веса и веса выше находящихся винтов подается вниз до упора его головки в нижние плечи рычагов 7. Одноплечий рычаг 10, взаимодействуя с профилем 25 насадки 17, разворачивается против часовой стрелки, и рабочим участком, выполняющим роль отвертки, входит в наконечник 12. При дальнейшем движении патрона 5
вниз рычаг 10 взаимодействует с головкой винта, входит в паз под отвертку и доворачивает винт на необходимую глубину. Вращение прекращается. Дается команда на возврат подвижных частей устройства в исходное положение. Верхняя полость пневмоцилиндра 20 соединяется с атмосферой и пружины J5 и 13 возвращают элементы устройства в верхнее положение. В это время рычаги 7 и 10 под действием пружин 8 и П также возвращаются в положение, показанное на фиг.1. При этом головка очередного винта освобождается и винт под действием собственного веса пос тупает в нижнкяо часть наконечника 12 до упора головкой в пружины 19. Если перед началом работы устройсва винт не находится в нижней части наконечника 12, необходимо дать команду на пневмоцилиндр 20 для зарядки устройства.
, Использование изобретения позволяет повысить производительность 1на операциях сборки.
20
гг гд
щ
is
13
гч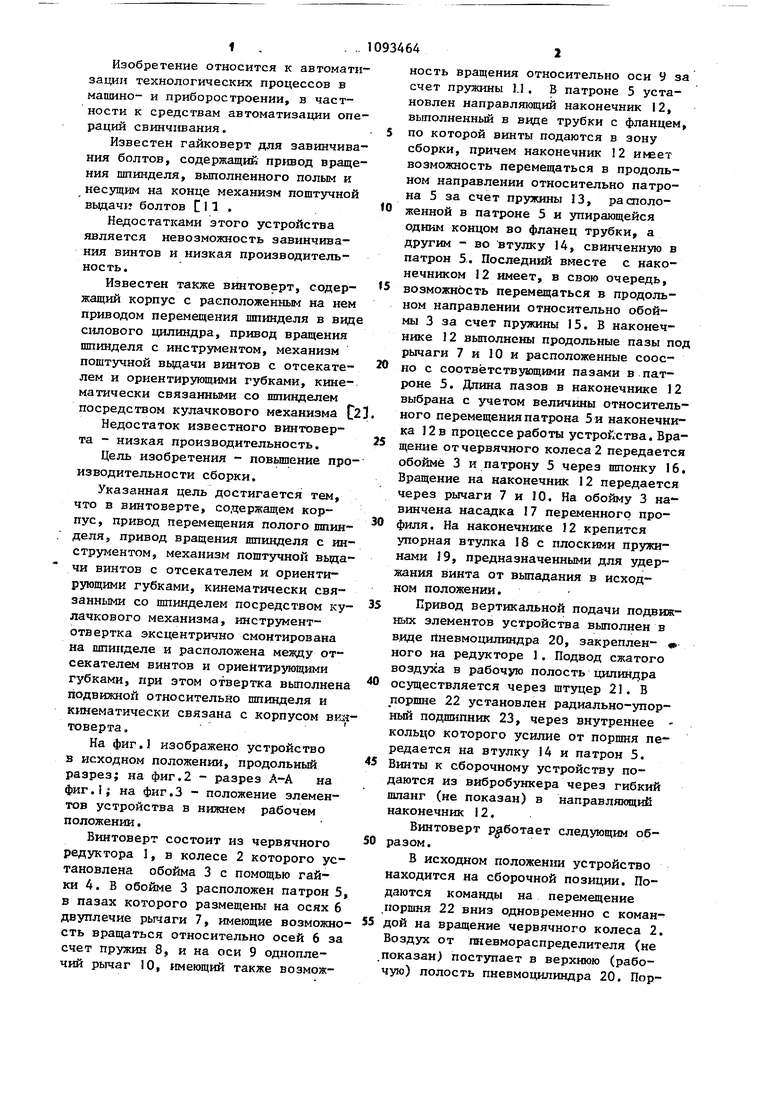

| название | год | авторы | номер документа |
|---|---|---|---|
| Винтоверт | 1983 |
|
SU1118521A1 |
| Винтоверт | 1985 |
|
SU1305019A1 |
| Механизм зарядки винтоверта | 1986 |
|
SU1440656A1 |
| Устройство для сборки винтов с шайбами | 1984 |
|
SU1256945A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Устройство для автоматической сборки деталей | 1972 |
|
SU441130A1 |
| Винтозавинчивающее устройство | 1984 |
|
SU1177114A1 |
| Винтозавертывающая машина | 1973 |
|
SU478706A1 |
| Винтоверт | 1978 |
|
SU841953A1 |
| Устройство для сборки пола контейнера | 1987 |
|
SU1444118A1 |


ВКНТОВЕРТ, содержащий корпус, привод перемещения полого шпинделя, привод вращения шпинделя с imструментом, механизм поштучной выдачи винтов с отсекателем и ориентирующими губками, кинематически связанными со шпинделем при помощи кулачкового механизма, о т л и ч а ю щ и и с я тем, что, с целью повышения производительности, инструмент эксцентрично смонтирован на шпинделе и расположен между отсекателем винтов и ориентирующими губками, при этом инструмент выполнен подвияшым относительно шпинделя и кинематически связан с корпусом винтоверта. (О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шерман В.Л., Лёгоньких Г.В | |||
| Механизация сборочных работ в приборостроении | |||
| Под ред.канд.технич | |||
| наук М.П | |||
| Новикова | |||
| П., изд-во ма-шиностроительной | |||
| литературы, 1963, с.200, 201, фиг.79 б) | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3592248, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
