(2J) 422J6J8/25-08
(22) ,87
(46) 15,12.88, Бюл, № 46
(75) Н.И.Мась, О.А.Зубрицкий
и Д.И.Стеценко
(53)621.757(088.8)
(56)Чертеж № 9304 Z 00.00, ГДР, з-д 7 Октября, Цвиркау.
(54)УСТРОЙСТВО ДЛЯ СБОРКИ ПОЛА КОНТЕЙНЕРА
(57)Изобретение относится к сбороч - ному производству, в частности к устройствам для сборки контейнеров. Цель изобретения - повышение производительности. Устройство содержит
тележку, состоящую из задней части J со свободно катящимися катками 2 установленными на поперечине, соединенной продольной балкой 4 с передней частью 5, На поперечине установлен привод перемещения тележки. На передней части 5 установлены подпружиненные обрезиненные ролики для взаимодействия с полом и стенками контейнера. Там же расположены агрегатные головки для сверления отверстий и установки самонарезных винтов крепления пола контейнера к каркасу. ты подаются из питателя по лоткам к каждой агрегатной головке, 12 ил.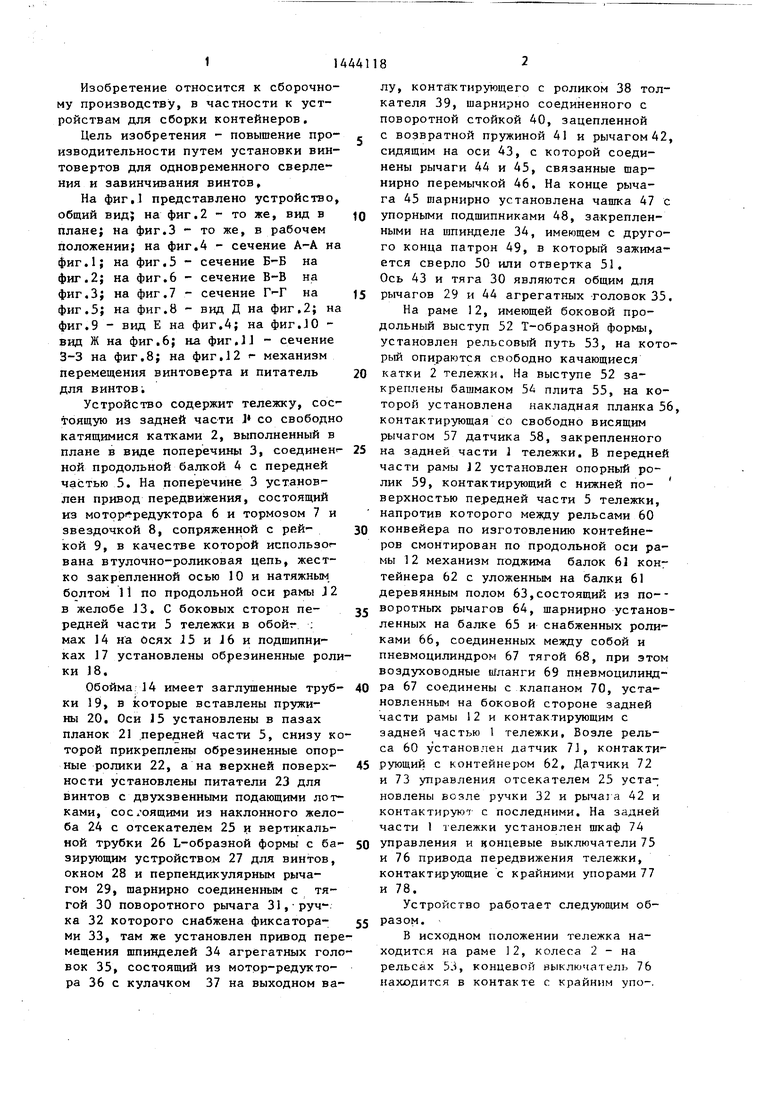
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛОДЕРЕВЯННЫХ БАЛОК ИЗ МЕТАЛЛИЧЕСКОГО СЕРДЕЧНИКА И ДВУХ ДЕРЕВЯННЫХ ОБКЛАДОК И ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2354790C2 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Тележка складная с полуавтоматическим раскладыванием, складыванием по средством одной кнопки с складными насадками пружинный толкатель, инструментальный ключ и функцией построения тележкой конструкций типа контейнер | 2019 |
|
RU2743301C1 |
| Автомат для резки труб | 1982 |
|
SU1041270A1 |
| Станок для сборки трубчатых секций теплообменников | 1977 |
|
SU656707A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Станок для фасонной резки труб | 1979 |
|
SU829363A1 |
| УСТРОЙСТВО И.И.СТАШЕВСКОГО ДЛЯ ВЫРАЩИВАНИЯ ДОЖДЕВЫХ ЧЕРВЕЙ | 1992 |
|
RU2005363C1 |
| Устройство для очистки и окраски наружной поверхности корпуса судна | 1978 |
|
SU747771A1 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |

..
« Л -, 45
ff4 . 66
&
65 68
Изобретение относится к сборочному производству, в частности к устройствам для сборки контейнеров,
Цель изобретения - повышение про- изводительности путем установки вин- товертов для одновременного сверления и завинчивания винтов,
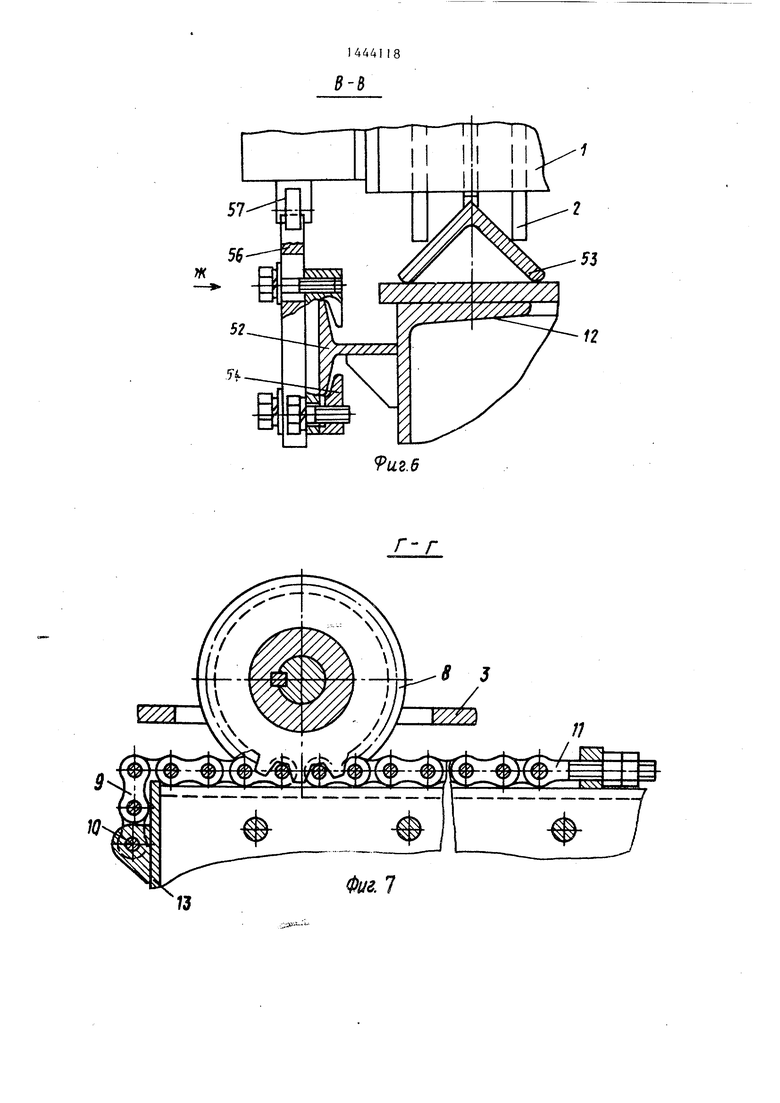
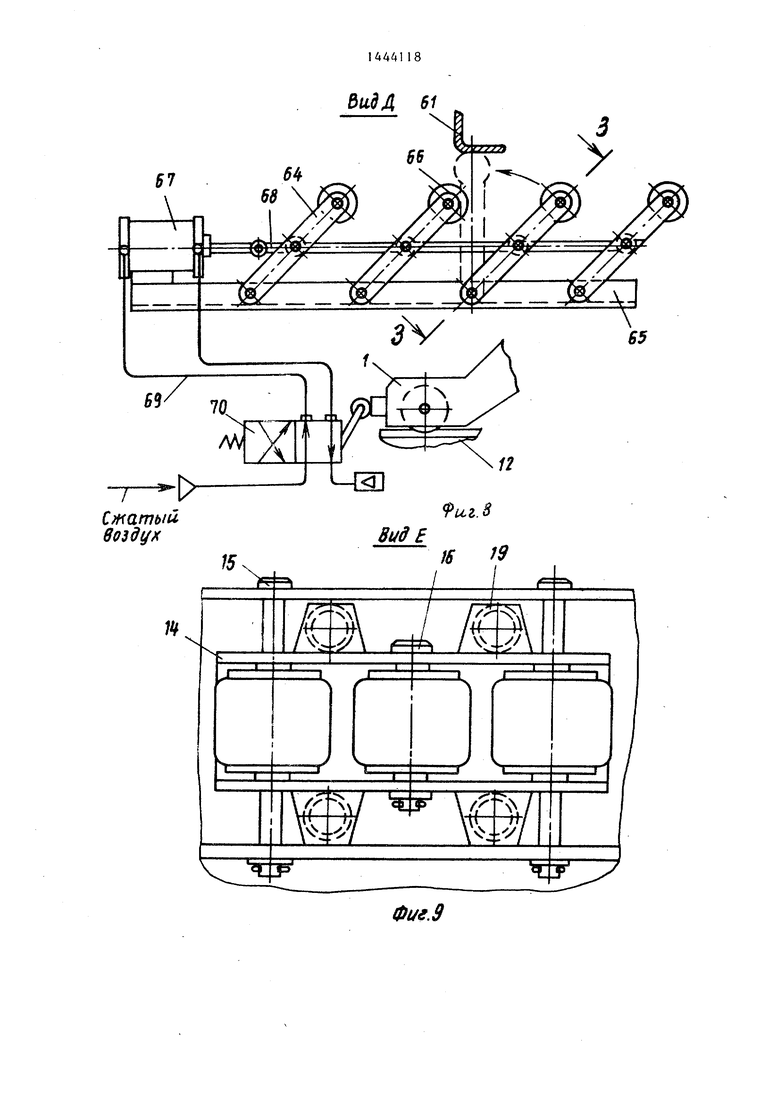
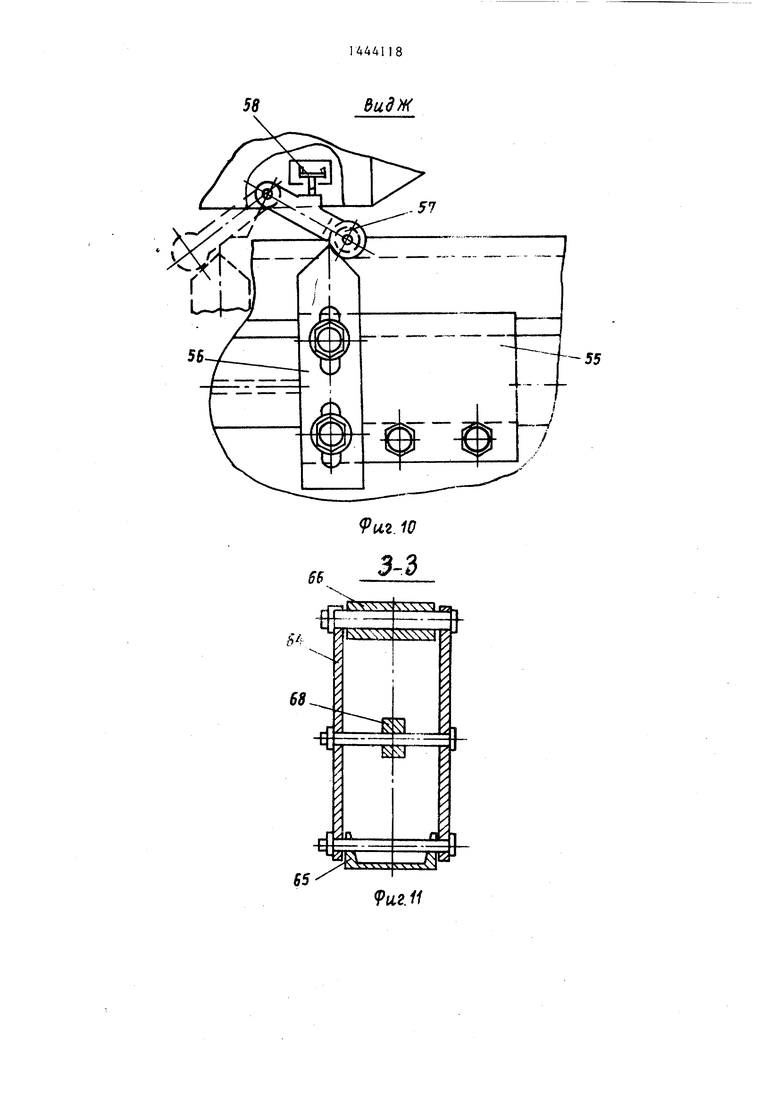
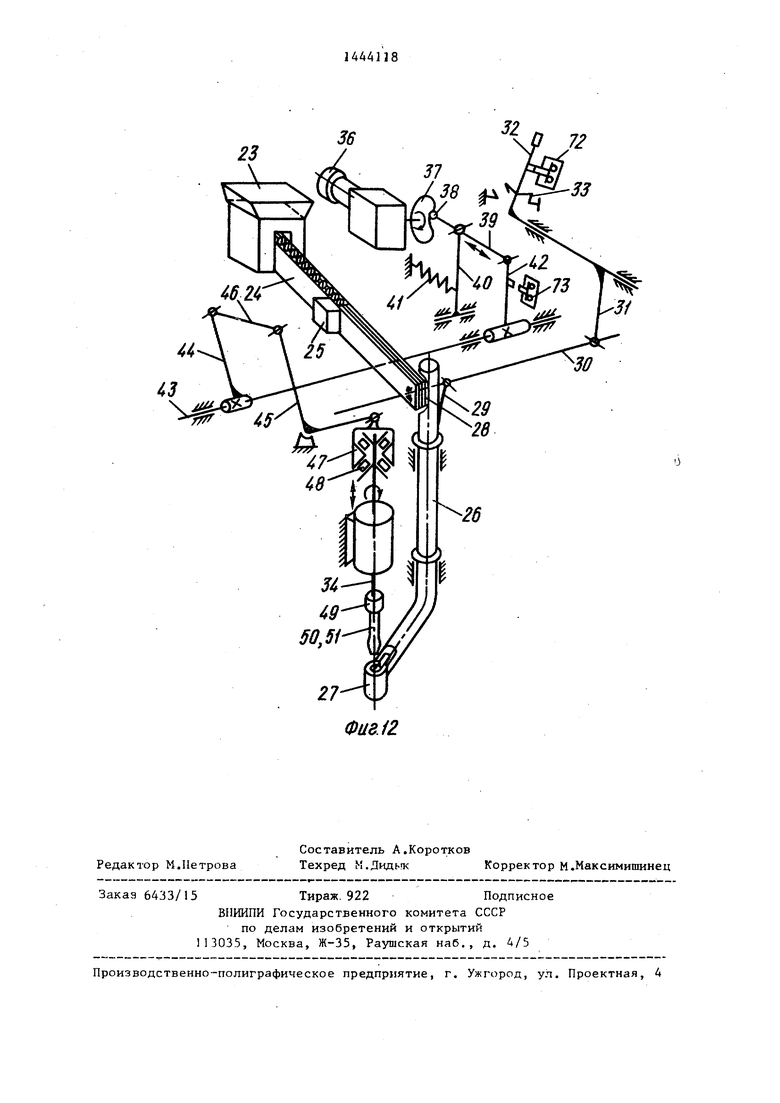
На фиг,1 представлено устройство, общий вид; на фиг.2 - то же, вид в плане; на фиг.З - то же, в рабочем положении; на фиг.А - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.2; на фиг.6 - сечение В-В на фиг.З; на фиг.7 - сечение на фиг.З; на фиг.8 - вид Д на фиг.2; на фиг.9 - вид Е на фиг.4; на фиг.JO - вид Ж на фиг.6; на фиг.и - сечение 3-3 на фиг.8; на фиг. 12 - механизм перемещения винтоверта и питатель для винтов;
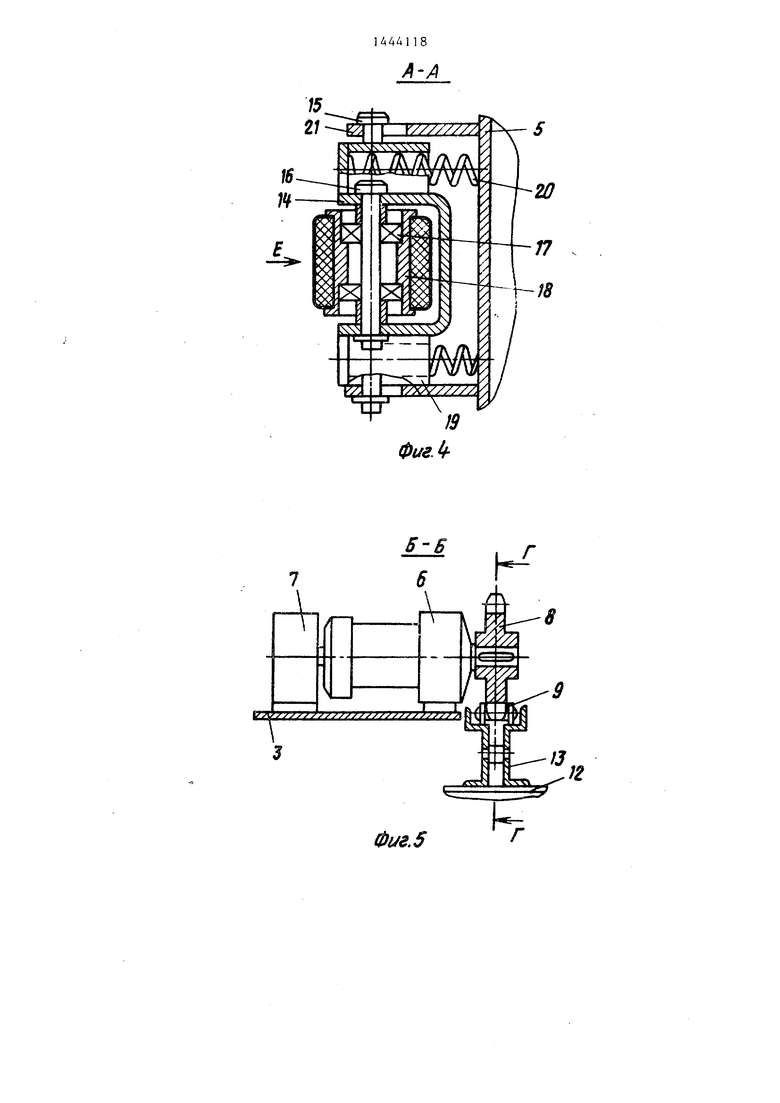
Устройство содержит тележку, состоящую из задней части J со свободно катящимися катками 2, выполненный в плане в виде поперечины 3, соединенг- ной продольной балкой 4 с передней частью 3. На поперечине 3 установлен привод передвижения, состоящий из мотор редуктора 6 и тормозом 7 и звездочкой 8, сопряженной с рей- кой 9, в качестве которой использог- вана втулочно-роликовая цепь, жестко закрепленной осью 10 и натяжным болтом 11 по продольной оси рамы J 2 в желобе J3. С боковых сторон пе- редней части 3 тележки в обойг ; мах 14 на Осях J 3 и J 6 и подшипниках 17 установлены обрезиненные ролики 18.
Обойма 14 имеет заглушенные труб- ки 19, в которые вставлены пружины 20. Оси J3 установлены в пазах планок 21 передней части 3, снизу которой прикреплены обрезиненные опорные ролики 22, а на верхней поверх- ности установлены питатели 23 для винтов с двухзвенными подающими лотками, сое оящими из наклонного желоба 24 с отсекателем 23 и вертикальной трубки 26 L-образной формы с ба- зирующим устройством 27 для винтов, окном 28 и перпендикулярным рычагом 29, шарнирно соединенным с тягой 30 поворотного рьтага 31, ручка 32 которого снабжена фиксатора- ми 33, там же установлен привод перемещения шпинделей 34 агрегатных головок 33, состоящий из мотор-редуктора 36 с кулачком 37 на выходном валу, контактирующего с роликом 38 толкателя 39, шарнирно соединенного с поворотной стойкой 40, зацепленной с возвратной пружиной 41 и рычагом 42 сидящим на оси 43, с которой соединены рычаги 44 и 43, связанные шарнирно перемычкой 46. На конце рычага 43 шарнирно установлена чашка 47 с упорными подшипниками 48, закрепленными на шпинделе 34, имеющем с другого конца патрон 49, в который зажимается сверло 30 или отвертка 31. Ось 43 и тяга 30 являются общим для рычагов 29 и 44 агрегатных головок 33
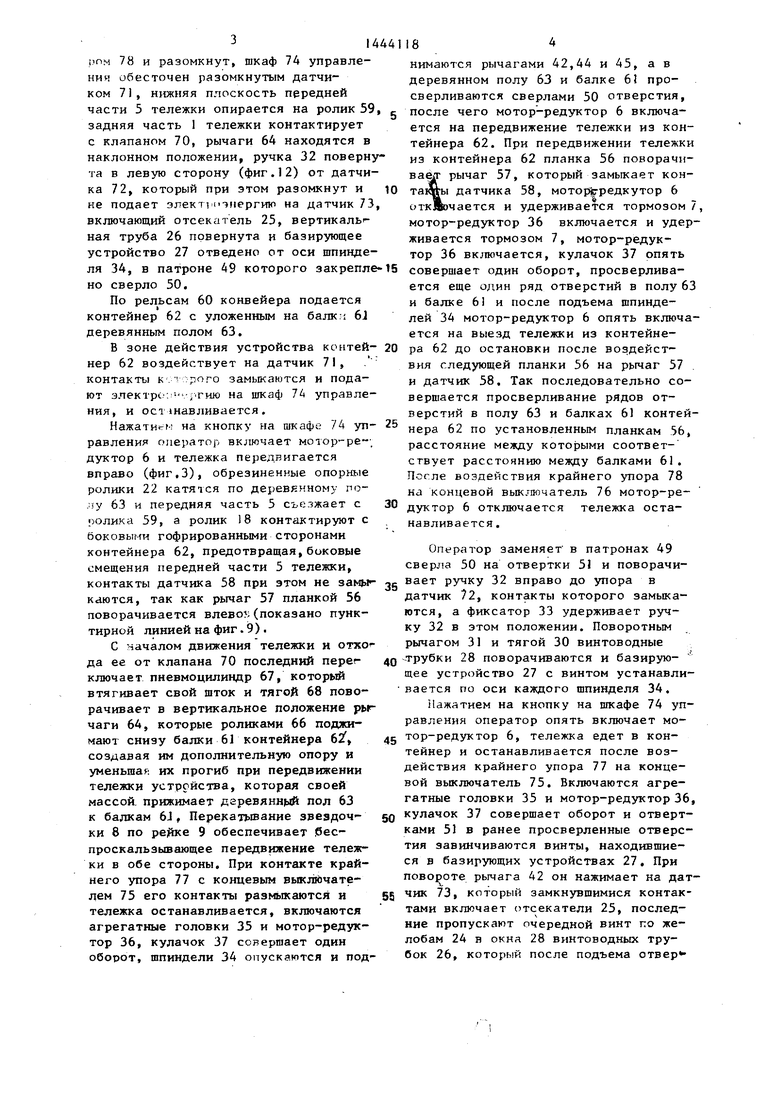
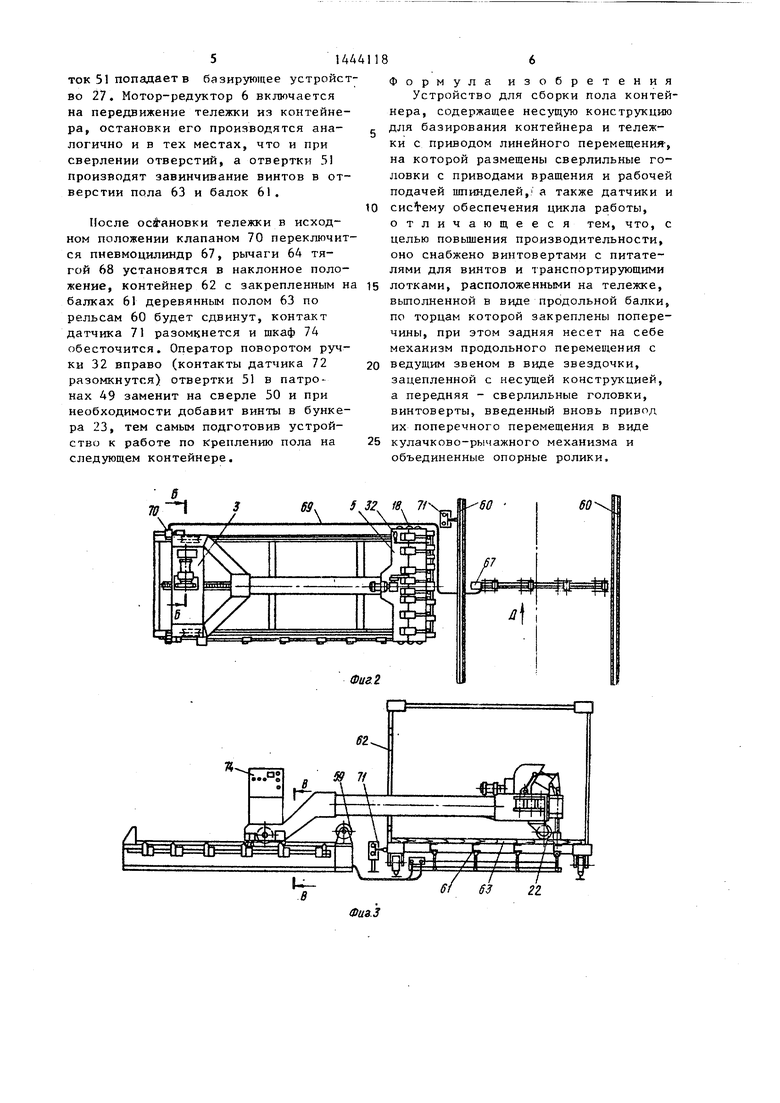
На раме 12, имеющей боковой продольный выступ 32 Т-образной формы, установлен рельсовый путь 33, на который опираются свободно качающиеся катки 2 тележки. На выступе 32 закреплены башмаком 34 плита 33, на которой установлена накладная планка 3 контактирующая со свободно висящим рычагом 57 датчика 38, закрепленного на задней части J тележки. В передней части рамы 12 установлен опорный ролик 39, контактирующий с нижней по- верхностью передней части 3 тележки, напротив которого между рельсами 60 конвейера по изготовлению контейнеров смонтирован по продольной оси рамы 12 механизм поджима балок 61 контейнера 62 с уложенным на балки 61 деревянным полом 63,состоящий из поворотных рычагов 64, шарнирно установленных на балке 63 и снабженных роликами 66, соединенных между собой и пневмоцилиндром 67 тягой 68, при этом воздуховодные ш ланги 69 пневмоцилинд- ра 67 соединены с клапаном 70, установленным на боковой стороне задней части рамы 12 и контактирующим с задней частью 1 тележки, Возле рельса 60 установлен датчик 7J, контакти рующий с контейнером 62, Датчики 72 и 73 управления отсекателем 23 установлены возле ручки 32 и рычага 42 и контактируют с последними. На задней части I 1 ележки установлен шкаф 74 управления и нонцевые выключатели 73 и 76 привода передвижения тележки, контактирующие с крайними упорами 77 и 78.
Устройство работает следующим образом.
В исходном положении тележка находится на раме 12, колеса 2 - на рельсах 53, концевой выключатель 76 находится в контакте с крайним упо-.
314441184
рпм 78 и разомкнут, шкаф 74 управле- нимаются рычагами 42,44 и 45, а в
НИИ обесточен разомкнутым датчиком 71, нютняя плоскость передней части 5 тележки опирается на ролик 59, задняя часть 1 тележки контактирует с клапаном 70, рычаги 64 находятся в наклонном положении, ручка 32 повернута в левую сторону (фиг.12) от датчика 72, который при этом разомкнут и ю не подает электр1 мергию на датчик 73, включающий отсекатель 25, вертикаль - ная труба 26 повернута и базирующее устройство 27 отведено от оси шпинделя 34, в патроне 49 которого закрепле-15 совершает один оборот, просверлива- но сверло 50.ется еще один ряд отверстий в полу 63
По рельсам 60 конвейера подается контейнер 62 с уложенным на балкм 6J деревянным полом 63,
В зоне действия устройства контей- 20 ра 62 до остановки после воздейст- нер 62 воздействует на датчик 71, . вия следующей планки 36 на рь1чаг 57 контакты К : рого замыкаются и подают элeктp(.:. Гию на шкаф 74 управления, и останавливается.
Нажати.н на кнопку на шкафе 74 уп- 25 „gp 53 по установленным планкам 36, равления оператор включает мотор--ре-. расстояние между которыми соответ- дуктор 6 и тележка передвигается ствует расстоянию между балками 61.
деревянном полу 63 и балке 61 просверливаются сверлами 30 отверстия, 5 после чего мотор-редуктор 6 включается на передвижение тележки из контейнера 62. При передвижении тележки из контейнера 62 планка 56 поворачи- ваел- рычаг 57, который замыкает кон- таоты датчика 58, мотор -редкутор 6 откяочается и удерживается тормозом 7 МОтор-редуктор 36 включается и удерживается тормозом 7, мотор-редуктор 36 включается, кулачок 37 опять
и балке 61 и после подъема шпинделей 34 мотор-редуктор 6 опять включается на выезд тележки из контейнеи датчик 58, Так последовательно совершается просверливание рядов отверстий в полу 63 и балках 61 контейвправо (фиг,3), обрезиненкые опорные ролики 22 катятся по деревянному полу 63 и передняя часть 5 съезжает с ролика 39, а ролик 18 контактируют с боковыми гофрированными сторонами контейнера 62, предотвращая,боковые смещения передней части 5 тележки,
После воздействия крайнего упора 78 на концевой выключатель 76 мотор-ре дуктор 6 отключается тележка оста; навливается.
Оператор заменяет в патронах 49 сверла 30 на отвертки 5 и поворачи- контакты датчика 58 при этом не замьр- 35 РУЧку 32 вправо до упора в каются, так как рычаг 57 планкой 56 датчик 72, контакты которого замыкаготся, а фиксатор 33 удерживает ручку 32 в этом положении. Поворотньш рычагом 31 и тягой 30 винтоводные
поворачивается влево ; (показано пунктирной линией на фиг.9).
С началом движения тележки и отхо да ее от клапана 70 последний neper ключает пневмоцилиндр 67, который втягивает свой шток и тягой 68 поворачивает в вертикальное положение ры чаги 64, которые роликами 66 поджимают снизу балки 61 контейнера 62, создавая им дополнительную опору и уменьшая их прогиб при передвижении тележки устройства, которая своей массой, прижимает деревянн 1Й пол 63 к балкам 6J , Пере|сат тание звездочки 8 по рейке 9 обеспечивает бес- проскальзывающее передвижение тележки в обе стороны. При контакте крайнего упора 77 с концевым выклйчате- лем 75 его контакты размыкаются и тележка останавливается, включаются агрегатные головки 35 и мотор-редуктор 36, кулачок 37 совершает один оборот, шпиндели 34 опускаются и подсовершает один оборот, просверлива- ется еще один ряд отверстий в полу 63
деревянном полу 63 и балке 61 просверливаются сверлами 30 отверстия, после чего мотор-редуктор 6 включается на передвижение тележки из контейнера 62. При передвижении тележки из контейнера 62 планка 56 поворачи- ваел- рычаг 57, который замыкает кон- таоты датчика 58, мотор -редкутор 6 откяочается и удерживается тормозом 7, МОтор-редуктор 36 включается и удерживается тормозом 7, мотор-редуктор 36 включается, кулачок 37 опять
и балке 61 и после подъема шпинделей 34 мотор-редуктор 6 опять включается на выезд тележки из контейнера 62 до остановки после воздейст- вия следующей планки 36 на рь1чаг 57
„gp 53 по установленным планкам 36, расстояние между которыми соответ- ствует расстоянию между балками 61.
и датчик 58, Так последовательно совершается просверливание рядов отверстий в полу 63 и балках 61 контейПосле воздействия крайнего упора 78 на концевой выключатель 76 мотор-ре дуктор 6 отключается тележка оста; навливается.
Оператор заменяет в патронах 49 сверла 30 на отвертки 5 и поворачи- 35 РУЧку 32 вправо до упора в датчик 72, контакты которого замыкаготся, а фиксатор 33 удерживает ручку 32 в этом положении. Поворотньш рычагом 31 и тягой 30 винтоводные
40 --трубки 28 поворачиваются и базирующее устройство 27 с винтом устанавли- вается по оси каждого шпинделя 34.
Нажатием на кнопку на шкафе 74 управления оператор опять включает тор-редуктор 6, тележка едет в контейнер и останавливается после воздействия крайнего упора 77 на концевой выключатель 75, Включаются агрегатные головки 33 и мотор-редуктор 36
5Q кулачок 37 совершает оборот и отвертками 51 в ранее просверленные отверстия завинчиваются винты, находившиеся в базирующих устройствах 27, При повороте рычага 42 он нажимает на датgg чик 73, который замкнувшимися контактами включает отсекатели 25, последние пропускают очередной винт го желобам 24 в окна 28 винтоводных трубок 26, который после подъема отвер б 70
--
/ГТГ/
Sf 63 2i
ФигЛ
Фие.5
Ж
Фиг, 1
9u2.6
Г Г
Сжатый воздух
15
65
9ui.B
8ifd Е
Фиг, 9
55
Риг.И
36
27
Фаг. 12
