1
Изобретение относится к машиностроению, а именно к устройствам для автоматизации процессов сборки резьбовых соединений, и может быть использовано в различных отраслях промышленности.
Цель изобретения - расширение технологических возможностей и повышение качества сборки за счет того, что одновременно производится сборка двух резьбовых соединений.
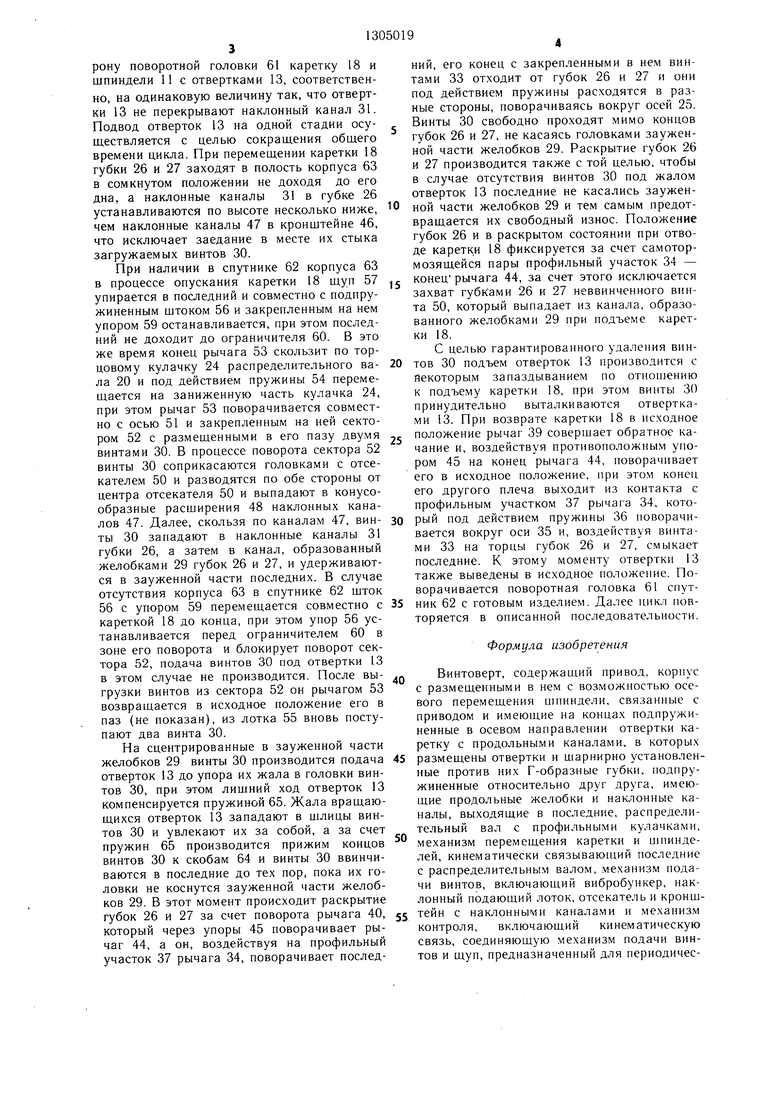
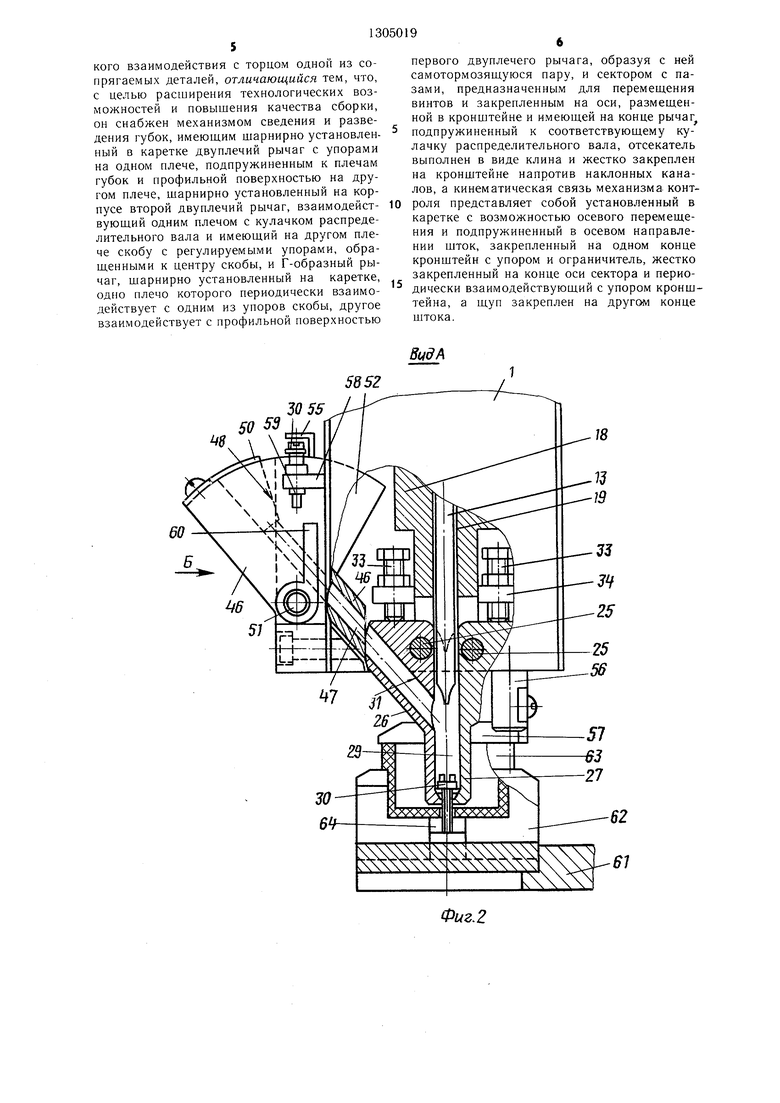
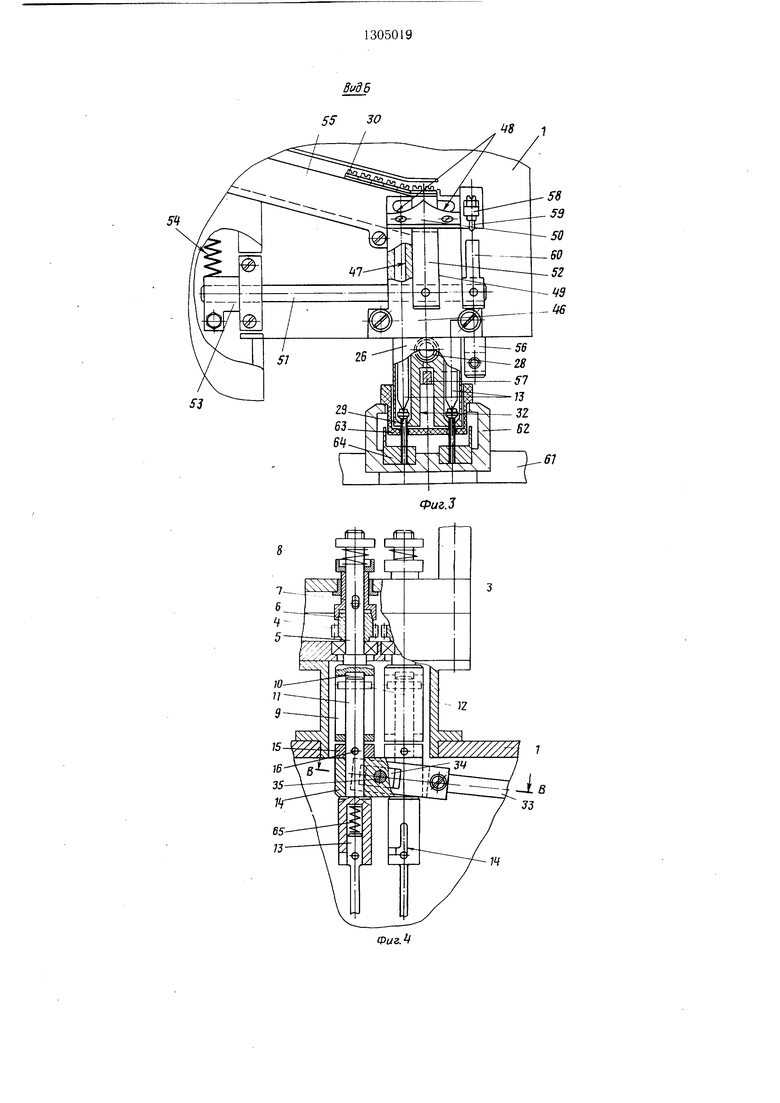
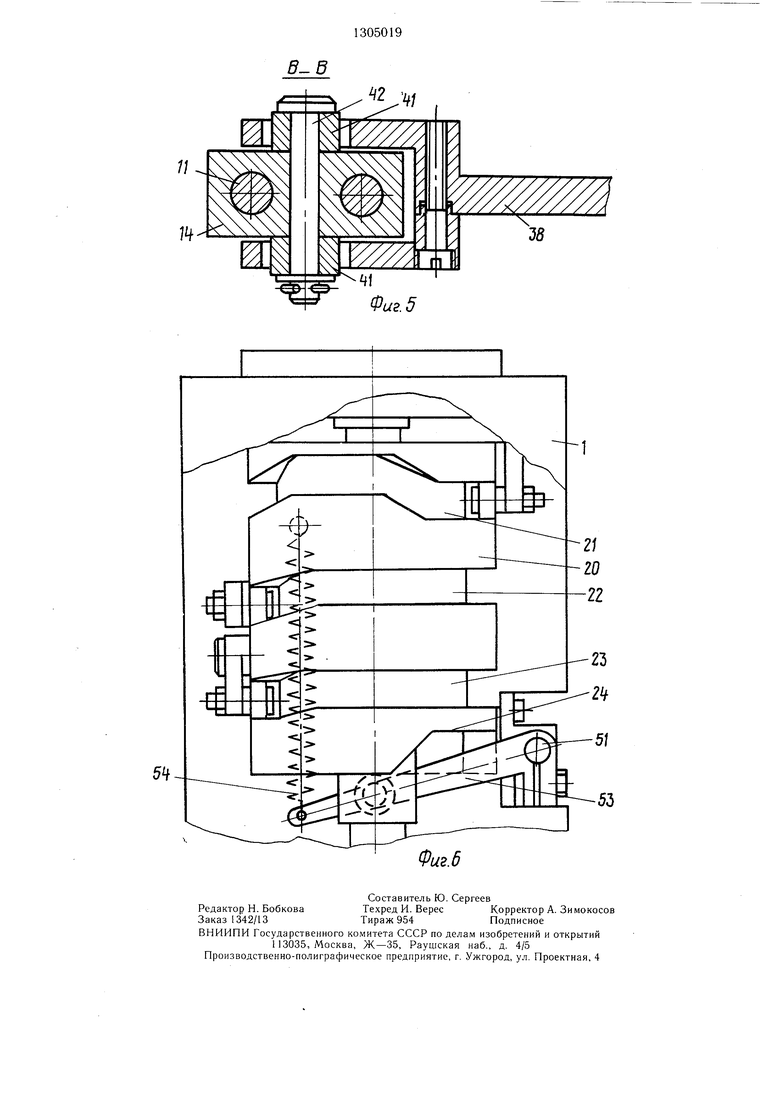
На фиг. -1 изображен винтоверт, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - установка цJпиндeлeй в корпусе; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - установка распределительного вала в корпусе.
Винтоверт содержит корпус 1, установленный в нем привод 2, связанный с ним редуктор 3, состоящий из ведушего зубчатого колеса (не показано), жестко закрепленного tja валу привода 2, ведомые зубчатые колеса 4, установленнь е с возможностью вращения на выходном валу 5 редуктора 3 и связанные с ним посредством фрикционных муфт, каждая из которых имеет ведущую полумуфту 6, выполненную заодно целое с ведомым зубчатым колесом 4, и ведомую полумуфту 7, установленную с возможностью осевого перемещения и совместного вращения с выходным валом 5 и подпружиненную к ведущей полу муфте 6 пружиной 8. Каждый выходной вал 5 выполнен с диаметральным пазом 9 и центральным каналом 10. В центральных каналах 10 выходных валов о размещены хвостовики щпин- де., 1ей 11 с возможностью совместного вращения и осевого перемещения. В хвостовики шпинделей 11 запрессованы штифты 12, концы которых расположены в диаметральных пазах 9 ВЫХОДРГЫХ валов 5. На концах шпинделей 11 закреплены отвертки 13. Средние части шпинделей 11 охватываются обоймой 14, с, которой они взаимодействуют посредством колец 15, закрепленных на шпинделях 11 пггифта.ми 16.
В корпусе 1 размещены колонки 17, установленная на них с возможностью перемещения каретка 18, имеющая каналы 19,
В каретке 18 закреплен м роля, включающий подпружи вом направлении щток 56, за одном его конце щуп 57, а кронштейн 58 с упором 59. щен в пазу 32 губок 26 и периодически взаимодействуе телем 60, жестко закрепленн ном конце оси 51. На корпусе поворотная головка 6 со предназначенным для разме собираемых изделий корпуса
Винтоверт работает след
зом.
через которые свооодно проходят отвертки
13, и распределительный вал 20 с профиль- 45 Отвертки 13 подпружинены ными дорожками 21-23 и торцовым кулач- шпинделей 11 пружиной 65. ком 24.
В каретке 18 на осях 25 установлены губки 26 и 27, подпружиненные одна относительно другой пружиной 28. Губки 26 и 27 размещены против каналов 19 и имеют полугруглые сужающиеся на концах желобки 29, обращенные один к другому и образующие совместно канал, в котором размещаются винты 30 и отвертки 13. В губ26 выполнены наклонные каналы 31,
ке
выходящие в желобки 29. В губках 26 и 27 параллельно желобкам 29 выполнен сквозной паз 32. С торцами губок 26 и 27 вза55
Предварительно в одной и воротной головки 61 в нее спутник 62 с размещенными ми 64 и корпусом 63. Затем п ловку 61 новорачивают на др на которой осуществляется оп и включают винтоверт, при это щения распределительного вал поворачиваться рычаги 38 взаимодействуют с профильн ми 21 и 23 последнего, и пере
05019
2
имодействуют винты 33, установленные на конце рычага 34, размещенного в каретке 18 с возможностью поворота вокруг оси 35, подпружиненного к губкам 26 и 27 пружиной 36 и имеющего на другом конце про- 5 дольный участок 37.
В корпусе с возможностью поворота размещены рычаги 38-40, которые одним концом взаимодействуют с нрофильными дорожками 21-23 соответственно. Рычаг 38 10 свободным концом взаимодействует с обоймой 14 через сухари 41, установленные в последней на оси 42. Рычаг 40 свободным концом взаимодействует с кареткой 18 через сухари 41, установленные в последней на осях 43. Рычаг 39 свободным концом кинематически связан с концом рычага 34 посредством двуплечего рычага 44, размещенного в каретке 18 с возможностью поворота. На конце рычага 39, взаимодействующего с двуплечим рычагом 44, установлены ре- 20 гулируемые упоры 45.
На корпусе 1 размещен механиз.м подачи и отсечки винтов 30, включающий кронщ- тейн 46, закреплепный на корпусе 1 и имеющий наклонные каналы 47 с конусообразным расширением 48 и паз 49, закрепленный на кронштейне 46 отсекатель 50, размещенный в пазу 49 кронштейна 46 с возможностью поворота вокруг оси 51 поворотный сектор 52 с пазом (не показан)., нред- назначенным для размепления в нем концов винтов 30, жестко закрепленный на конце оси 51 рычаг 53, конец которого подпружинен пружиной 54 к торцовому кулачку 24, подающий лоток 55 и вибробункер (не показан).
В каретке 18 закреплен механизм контроля, включающий подпружиненный в осевом направлении щток 56, закрепленный на одном его конце щуп 57, а на другом - кронштейн 58 с упором 59. Щуп 57 размещен в пазу 32 губок 26 и 27. Упор 59 периодически взаимодействует с ограничителем 60, жестко закрепленным на свободном конце оси 51. На корпусе 1 установлена поворотная головка 6 со спутником 62, предназначенным для размещения в не.м собираемых изделий корпуса 63 и скобы 64.
относительно
25
30
35
45 Отвертки 13 подпружинены шпинделей 11 пружиной 65.
Винтоверт работает следующим обравертки 13 подпружинены инделей 11 пружиной 65.
зом.
Предварительно в одной из позиций поворотной головки 61 в нее устанавливают спутник 62 с размещенными в нем скобами 64 и корпусом 63. Затем поворотную головку 61 новорачивают на другую позицию, на которой осуществляется операция сборки, и включают винтоверт, при этом за счет вращения распределительного вала 20 начинают поворачиваться рычаги 38 и 40, которые взаимодействуют с профильными дорожками 21 и 23 последнего, и перемещают в сто10
рону поворотной головки 61 каретку 18 и шпиндели 11 с отвертками 13, соответственно, на одинаковую величину так, что отвертки 13 не перекрывают наклонный канал 31. Подвод отверток 13 на одной стадии осуществляется с целью сокращения общего времени цикла. При перемещении каретки 18 губки 26 и 27 заходят в полость корпуса 63 в сомкнутом положении не доходя до его дна, а наклонные каналы 31 в губке 26 устанавливаются по высоте несколько ниже, чем наклонные каналы 47 в кронщтейне 46, что исключает заедание в месте их стыка загружаемых винтов 30.
При наличии в спутнике 62 корпуса 63 в процессе опускания каретки 18 щуп 57 упирается в последний и совместно с подпружиненным штоком 56 и закрепленным на нем упором 59 останавливается, при этом последний не доходит до ограничителя 60. В это же время конец рычага 53 скользит по торцовому кулачку 24 распределительного ва- 20 ла 20 и под действием пружины 54 перемещается на заниженную часть кулачка 24, при этом рычаг 53 поворачивается совместно с осью 51 и закрепленным на ней сектором 52 с размещенными в его пазу двумя -с винтами 30. В процессе поворота сектора 52 винты 30 соприкасаются головками с отсе- кателем 50 и разводятся по обе стороны от центра отсекателя 50 и выпадают в конусообразные расширения 48 наклонных каналов 47. Далее, скользя по каналам 47, вин- ЗО ты 30 западают в наклонные каналы 31 губки 26, а затем в канал, образованный желобками 29 губок 26 и 27, и удерживаются в зауженной части последних. В случае отсутствия корпуса 63 в спутнике 62 щток
НИИ, его конец с закрепленными в нем винтами 33 отходит от губок 26 и 27 и они под действием пружины расходятся в разные стороны, поворачиваясь вокруг осей 25. Винты 30 свободно проходят мимо концов губок 26 и 27, не касаясь головками зауженной части желобков 29. Раскрытие губок 26 и 27 производится также с той целью, чтобы в случае отсутствия винтов 30 под жалом отверток 13 последние не касались зауженной части желобков 29 и тем самым предотвращается их свободный износ. Положение губок 26 и в раскрытом состоянии при отводе каретки 18 фиксируется за счет самотормозящейся пары профильный участок 34 - конец рычага 44, за счет этого исключается захват губками 26 и 27 неввинченного винта 50, который выпадает из канала, образованного желобками 29 при подъеме каретки 18.
С целью гарантированного удаления винтов 30 подъем отверток 13 производится с некоторым запаздыванием по отношению к подъему каретки 18, при этом винты 30 принудительно выталкиваются отвертками 13. При возврате каретки 18 в исходное положение рычаг 39 совершает обратное качание и, воздействуя противоположным упором 45 на конец рычага 44, поворачивает его в исходное положение, при этом конец его другого плеча выходит из контакта с профильным участком 37 рычага 34, который под действием пружины 36 поворачивается вокруг оси 35 и, воздействуя винтами 33 на торцы губок 26 и 27, смыкает последние. К этому моменту отвертки 13 также выведены в исходное положение. Поворачивается поворотная головка 61 спут40
45
56 с упором 59 перемещается совместно с 35 ник 62 с готовым изделием. Далее цикл пов- кареткой 18 до конца, при этом упор 56 устанавливается перед ограничителем 60 в зоне его поворота и блокирует поворот сектора 52, подача винтов 30 под отвертки 13 в этом случае не производится. После выгрузки винтов из сектора 52 он рычагом 53 возвращается в исходное положение его в паз (не показан), из лотка 55 вновь поступают два винта 30.
На сцентрированные в зауженной части желобков 29 винты 30 производится подача отверток 13 до упора их жала в головки винтов 30, при этом лишний ход отверток 13 компенсируется пружиной 65. Жала вращающихся отверток 13 западают в шлицы винтов 30 и увлекают их за собой, а за счет пружин 65 производится прижим концов винтов 30 к скобам 64 и винты 30 ввинчиваются в последние до тех пор, пока их головки не коснутся зауженной части желобков 29. В этот момент происходит раскрытие губок 26 и 27 за счет поворота рычага 40, который через упоры 45 поворачивает рычаг 44, а он, воздействуя на профильный участок 37 рычага 34, поворачивает послед50
55
торяется в описанной последовательности. Формула изобретения
Винтоверт, содержащий привод, корпус с размещенными в нем с возможностью осевого перемещения шпиндели, связанные с приводом и имеющие на концах подпружиненные в осевом направлении отвертки каретку с продольными каналами, в которых размещены отвертки и шарнирно установленные против них Г-образные губки, подпружиненные относительно друг друга, имеющие продольные желобки и наклонные каналы, выходящие в последние, распределительный вал с профильными кулачками, механизм перемещения каретки и итинде- лей, кинематически связь ваю ций последние с распределительным валом, .механизм подачи винтов, включающий вибробункер, наклонный подающий лоток, отсекатель и кронштейн с наклонными каналами и механизм контроля, включающий кинематическую связь, соединяющую механизм подачи винтов и щуп, предназначенный для периодичес
0 с
НИИ, его конец с закрепленными в нем винтами 33 отходит от губок 26 и 27 и они под действием пружины расходятся в разные стороны, поворачиваясь вокруг осей 25. Винты 30 свободно проходят мимо концов губок 26 и 27, не касаясь головками зауженной части желобков 29. Раскрытие губок 26 и 27 производится также с той целью, чтобы в случае отсутствия винтов 30 под жалом отверток 13 последние не касались зауженной части желобков 29 и тем самым предотвращается их свободный износ. Положение губок 26 и в раскрытом состоянии при отводе каретки 18 фиксируется за счет самотормозящейся пары профильный участок 34 - конец рычага 44, за счет этого исключается захват губками 26 и 27 неввинченного винта 50, который выпадает из канала, образованного желобками 29 при подъеме каретки 18.
С целью гарантированного удаления винтов 30 подъем отверток 13 производится с некоторым запаздыванием по отношению к подъему каретки 18, при этом винты 30 принудительно выталкиваются отвертками 13. При возврате каретки 18 в исходное положение рычаг 39 совершает обратное качание и, воздействуя противоположным упором 45 на конец рычага 44, поворачивает его в исходное положение, при этом конец его другого плеча выходит из контакта с профильным участком 37 рычага 34, который под действием пружины 36 поворачивается вокруг оси 35 и, воздействуя винтами 33 на торцы губок 26 и 27, смыкает последние. К этому моменту отвертки 13 также выведены в исходное положение. Поворачивается поворотная головка 61 спут
ник 62 с готовым изделием. Далее цикл пов-
торяется в описанной последовательности. Формула изобретения
Винтоверт, содержащий привод, корпус с размещенными в нем с возможностью осевого перемещения шпиндели, связанные с приводом и имеющие на концах подпружиненные в осевом направлении отвертки каретку с продольными каналами, в которых размещены отвертки и шарнирно установленные против них Г-образные губки, подпружиненные относительно друг друга, имеющие продольные желобки и наклонные каналы, выходящие в последние, распределительный вал с профильными кулачками, механизм перемещения каретки и итинде- лей, кинематически связь ваю ций последние с распределительным валом, .механизм подачи винтов, включающий вибробункер, наклонный подающий лоток, отсекатель и кронштейн с наклонными каналами и механизм контроля, включающий кинематическую связь, соединяющую механизм подачи винтов и щуп, предназначенный для периодического взаимодействия с торцом одной из сопрягаемых деталей, отличающийся тем, что, с целью расширения технологических возможностей и повышения качества сборки, он снабжен механизмом сведения и разведения губок, имеюшим шарнирно установлен ный в каретке двуплечий рычаг с упорами на одном плече, подпружиненным к плечам губок и профильной поверхностью на другом плече, шарнирно установленный на корпервого двуплечего рычага, образуя с ней самотормозящуюся пару, и сектором с пазами, предназначенным для перемещения винтов и закрепленным на оси, размешенной в кронштейне и имеюшей на конце рычаг 5 подпружиненный к соответствующему кулачку распределительного вала, отсекатель выполнен в виде клина и жестко закреплен на кронштейне напротив наклонных каналов, а кинематическая связь механизма контпусе второй двуплечий рычаг, взаимодейст- 10 роля представляет собой установленный в вуюший одним плечом с кулачком распреде- каретке с возможностью осевого перемеш,е- лительного вала и имеюш,ий на другом плече скобу с регулируемыми упорами, обращенными к центру скобы, и Г-образный рычаг, шарнирно установленный на каретке, одно плечо которого периодически взаимо
действует с одним из упоров скобы, другое взаимодействует с профильной поверхностью
ния и подпружиненный в осевом направлении шток, закрепленный на одном конце кронштейн с упором и ограничитель, жестко закрепленный на конце оси сектора и периодически взаимодействующий с упором кронш тейна, а шуп закреплен на другом конце штока.
первого двуплечего рычага, образуя с ней самотормозящуюся пару, и сектором с пазами, предназначенным для перемещения винтов и закрепленным на оси, размешенной в кронштейне и имеюшей на конце рычаг подпружиненный к соответствующему кулачку распределительного вала, отсекатель выполнен в виде клина и жестко закреплен на кронштейне напротив наклонных каналов, а кинематическая связь механизма контроля представляет собой установленный в каретке с возможностью осевого перемеш,е-
ния и подпружиненный в осевом направлении шток, закрепленный на одном конце кронштейн с упором и ограничитель, жестко закрепленный на конце оси сектора и периодически взаимодействующий с упором кронштейна, а шуп закреплен на другом конце штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтоверт | 1982 |
|
SU1030154A1 |
| Устройство для сборки резьбовых соединений | 1980 |
|
SU929389A1 |
| Винтоверт | 1983 |
|
SU1118521A1 |
| Автомат для сборки винтов с гайками | 1991 |
|
SU1816624A1 |
| Винтоверт | 1982 |
|
SU1098744A1 |
| Винтозавертывающая машина | 1981 |
|
SU1030155A1 |
| Устройство для сборки крепежных элементов | 1987 |
|
SU1511103A1 |
| Винтоверт | 1989 |
|
SU1775286A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
Изобретение относится к машиностроению. Цель изобретения - расширение технологических возможностей и повышение качества сборки, которая достигается за счет одновременной сборки двух резьбовых соединений. Винтоверт содержит корпус 1, привод 2, редуктор 3, размещенные в корпусе 1 с возможностью перемещения шпиндели 11 с подпружиненными отвертками 13. Рычаг 38 взаимодействует одним концом со шпинделями, другим - с профильной дорожкой 21 распреде.тительного вала 20. Рычаг 34 с упорами 33 взаимодействует с Г-образными губками, образующими зауженный канал и предназначенными для удерживания винта. После подачи винтов в приемный канал шпиндели 11 перемещаются в сторону собираемых деталей 63 и 64. После захода лезвий отверток в пкпицы винтов последние наживляются в резьбовое отверстие детали 64. Затем упоры 33 рычага 34 отходят от Г-образных губок, которые расходятся, и винты свободно ввинчиваются в резьбовые отверстия детали 64, осуществляя сборку деталей 63 и 64. 6 ил. Q S (Л со о СП О со
18
61
Фиг. 2
f3
8 7
Щ
В-В
п
Фиг. 5
Фиг.6
Составитель Ю. Сергеев
Редактор Н. БобковаТехред И. ВересКорректор А. Зимокосов
Заказ 1342/13Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раущская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Винтоверт | 1982 |
|
SU1030154A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Многопозиционный автомат для сборки узла | 1981 |
|
SU921763A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
