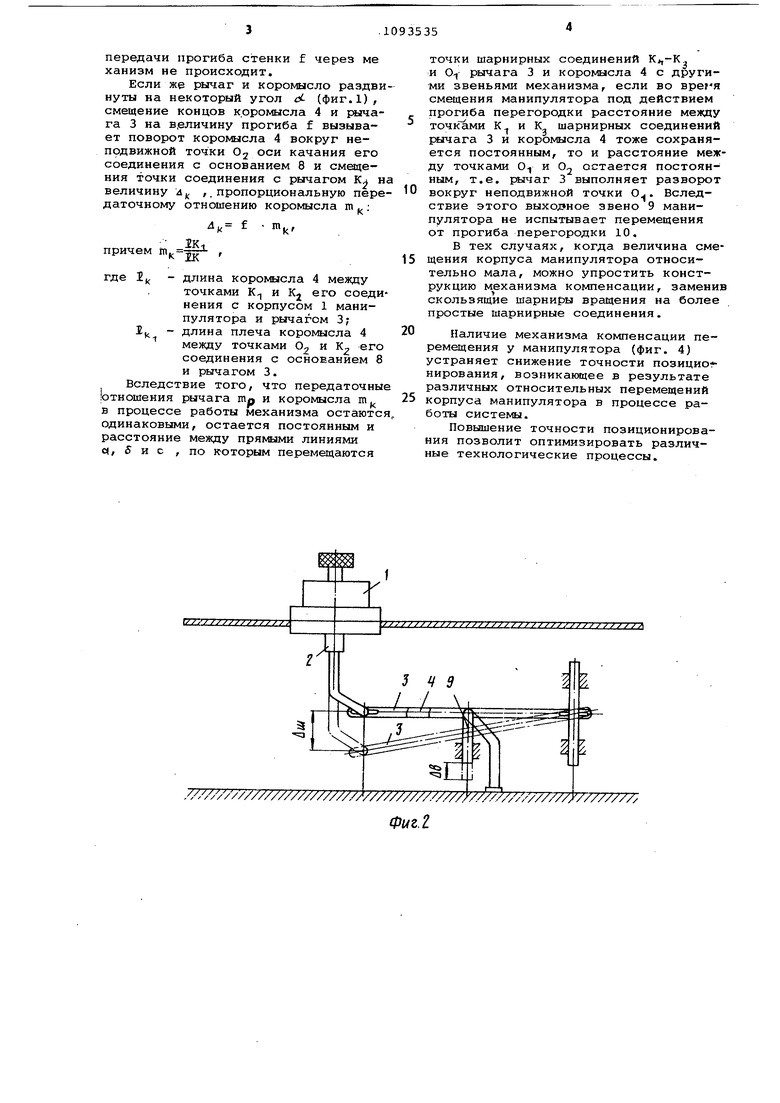
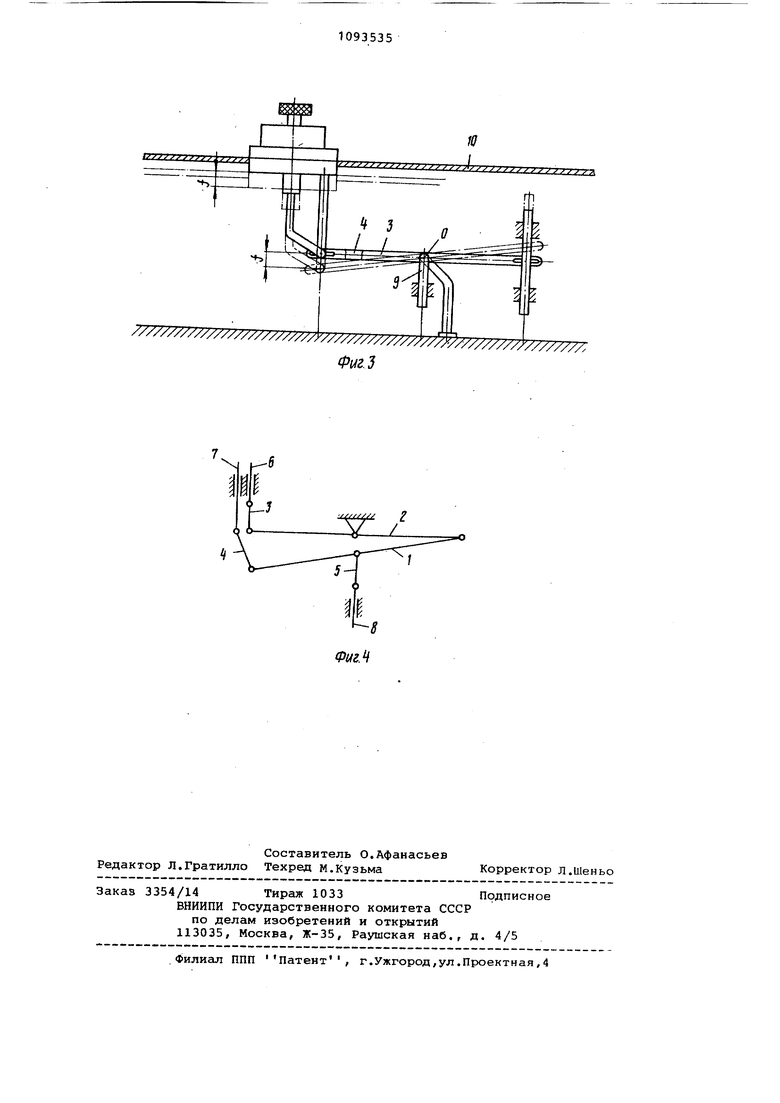
Изобретение относится к машинестроению и может быть использовано в различных устройствах и технологических процессах, предусматриваю щих применение манипуляторов, осуществляющих передачу движения из одной среды в другую через гибкую перегородку. Такие манипуляторы им ют корпус, передающий механизм и выходное звено. Известен манипулятор, содержащий основание, закрепленный на гиб кой перегородке корпус, размещенный в нем механизм передачи управляющего движения и вьвдвижной управ ляющий шток одного звена, связанны с выходным звеном 1. Недостатком известного манипуля ра является низкая точность позици нирования , обусловленнаясмещениями (колебаниями) корпуса манипулятора вызываемыми, например, изменяющейс стрелой прогиба перегородки в мест (установки манипулятора под действи ем переменного давления. Цель изобретения - повышение точ ности позиционирования. Цель достигается тем, что манипулятор, содержащий основание, закрепленный на гибкой перегородке ко пус, размещенный в нем механизм передачи управляющего движения и выдвижной управляющий шток одного зве на, связанный с выходным звеном, снабжен рычагом и коромыслом, шарнирно связанными одними концами соответственно с выдвижным управляю щим штоком и с корпусом, а другими концами - между собой, при этом ось качания коромысла жестко связана с основанием, а ось качания рычага со динена с выходным звеном, и отношение длин плеч рычага равно отноше нию длин плеч коромысла. На фиг. 1 изображен манипулятор общий вид; на фиг. 2 - положение звеньев механизма манипулятора при передаче-им перемещений; на фиг.З то же, при компенсации прогиба перегородки; на фиг. 4 - кинематическая схема упрслценного варианта меха низма компенсации манипулятора. Манипулятор состоит из корпуса 1 с механизмом передачи управляквдего движения и выдвижного управлякицего штока 2, шарнирно соединенного с ко цом рычага 3, который другим концом шарнирно соединен в одной точке с концом коромысла 4 и направляющим стержнем 5, другой конец коромысла шарнирно соединен с опорой 6, установленной на корпусе манипулятора 1 Коромысло 4 в средней точке на оси качания опорой 7 связано с неподвиж ным основанием 8, несущим объект позиционирования (не показан), а 3 шарнирно соединен с выходным звеном 9. Точка соединения, т.е ось качания О выходного звена 9 с рычагом 3, и точка опоры, т.е. ось качания 02 коромысла 4, делят длину плеч соответственно рычага и коромысла в одном выбранном отношении (например 1:1 или 1:2 и т.д.). Шарнирное соединение по концам рычага и коромысла в точках К, например, выполнено в виде сочленения продольного паза со стержнем и позволяет изменять в процессе работы длину звеньев механизма, сохраняя при этом выбранные передаточные отношения. Выходное звено 9 и стержень 5 установлены в неподвижных относительно основания 8 опорах с возможностью в.озвратно-поступательного движения параллельно направлению перемещения выходного штока, при этом точки шарнирных соединений К, перемещаются по взаимно параллельным прямым линиям а , S. и с . Корпус 1 манипулятора размещен на перегородке 10, нагрууенной например, наружным изменяющимся давлением Р. Рычаг 3 и коромысло 4 в исходном положении, например, сложены параллельно друг другу и могут быть в процессе работы манипулятора раздвинуты на некоторый угол . Манипулятор работает следующим образом. Рычаг 3 и коромысло 4 :(фиг. 2) находятся в исходном положении и угол между ними, например, равен нулю. При передаче перемещения манипулятором выдвижение штока 2 на величину л вызывает поворот рычага 3 относительно коромысла 4, в результате чего выходное звено 9 перемещается на величину dg , пропорциональную выбранному передаточному отношению рычага Шр: Л д Д Ш Ш , - 1ед причем m - IP где 2р - длина рычага 3 между точками Kj и У.2 его соедине- . ния с выходным штоком 2 и коромыслом 4; 1р - длина плеча рычага 3 между, точками О и К2 его соединения с выходным звеном 9 и коромыслом 4. В случае же прогиба перегородки 10 (фиг.З) на величину f под действием давления Р происходит совместное смещение концов коромысла 4 и рычага 3 относительно неподвижного основания 8 на одну и ту же величину f, вследствие чего рычаг 3 и коромысло 4 совместно поворачиваются на некоторый угол вокруг общей точки О, а именно точки соединения выходного звена 9 с рачагом 3, в результате передачи прогиба стенки f через ме ханизм не происходит. Если же рычаг и коромысло раздви нуты на некоторый угол d- (фиг.1), смещение концов коромысла 4 и {ялчага 3 на в.еличину прогиба f вызывает поворот коромысла 4 вокруг непрдвижной точки О2 оси качания его соединения с основанием 8 и смещения точки соединения с рычагом К н величину 4 ,.пропорциональную пере даточному отношению коромысла m : iK-i причем , где 2 - длина коромысла 4 между точками К и Kj его соеди нения с корпусом 1 манипулятора и рычагом 3; 1 - длина плеча коромысла 4 между точками О, и К его соединения с основанием 8 и рычагом 3. Вследствие того, что передаточны отношения рычага тр и коромысла т в процессе работы механизма остаютс одинаковыми, остается постоянным и расстояние между прямыми линиями с(, S и с , по которым перемещаются точки шарнирных соединений .. и рычага 3 и коромысла 4 с другими звеньями механизма, если во врегЯ смещения манипулятора под действием прогиба перегородки расстояние между К и К шарнирных соединений 1Ж1чага 3 и коромысла 4 тоже сохраняется постоянным, то и расстояние между точками О и О2 остается постоянным, т.е. рычаг 3 выполняет разворот вокруг неподвижной точки О. Вследствие этого выходэное звено 9 манипулятора не испытывает перемещения от прогиба перегородки 10. В тех случаях, когда величина смещения корпуса манипулятора относительно мала, можно упростить конструкцию механизма компенсации, заменив скользящие шарниры вращения на более простые шарнирные соединения. Наличие механизма компенсации перемещения у манипулятора (фиг. 4) устраняет снижение точности позицио нирования, возникающее в результате различных относительных перемещений корпуса манипулятора в процессе работы системы. Повышение точности позиционирования позволит оптимизировать различные технологические процессы.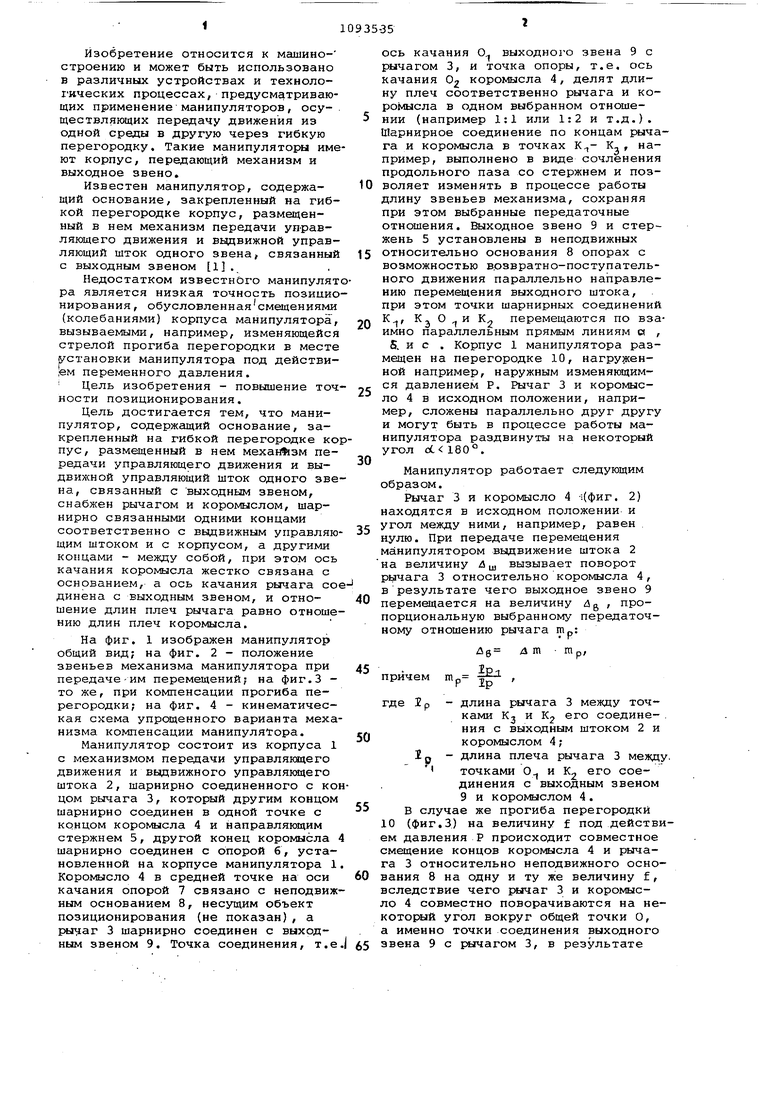
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| МАНИПУЛЯТОР ДЛЯ СУБМИКРОННЫХ ПЕРЕМЕЩЕНИЙ | 2018 |
|
RU2679260C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Манипулятор | 1984 |
|
SU1227459A1 |
| Двухцилиндровый насос для вязких жидкостей | 1985 |
|
SU1496641A3 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Транспортное средство для перевозки грузов | 1983 |
|
SU1238992A1 |
| ВЫЕМОЧНЫЙ МОДУЛЬ | 2010 |
|
RU2459076C1 |
| Манипулятор для загрузки-разгрузки технологических машин | 1987 |
|
SU1445943A1 |
МАНИПУЛЯТОР, содержащий основание, закрепленный на гибкой пе регородке корпус, размещенный в нем механизм передачи управляющего движения и выдвижной управляющий шток одного звена, связанный с выходным звеном, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен рычагом и коромыслом, шарнирно связанными одними концами соответственно с выдвижным управляющим штоком и с корпусом, а другими концами - между собой, при этом ось качания коромысла жестко связана с основанием, а ось качания рычага соединена с выходным звеном и отношение длин плеч рычага равно отношению длин плеч коромысла.
///////////////////////////У//////////////////////////////////////.
Фиг.З
/
| М., 1976, 1, с.159-160,римента, рис.2 (прототип.) |
