2.Манипулятор по п. 1, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения изменения ориентации исполнительного органа в крайних положениях, направляющие ползуна установлены в корпусе с возможностью изменения их углового положения.
3.Манипулятор по п. 1, отличающийся тем, что, с целью повышения точности позиционирования исполнительного органа за счет уменьшения суммарных зазоров в кине1
Изобретение касается двухпозиционных манипуляторов и может быть использовано для автоматизации загрузочно-разгрузочных операций при обслуживании сборочного или другого технологического оборудования.
Целью изобретения является увеличение надежности манипулятора за счет осуществления плоского перемещения ползуна с исполнительным органом от одного привода, расширение технологических возможностей за счет обеспечения изменения ориентации исполнительного органа в крайних положениях, а также повышение точности позиционирования за счет уменьшения суммарных зазоров в кинематической цепи привода.
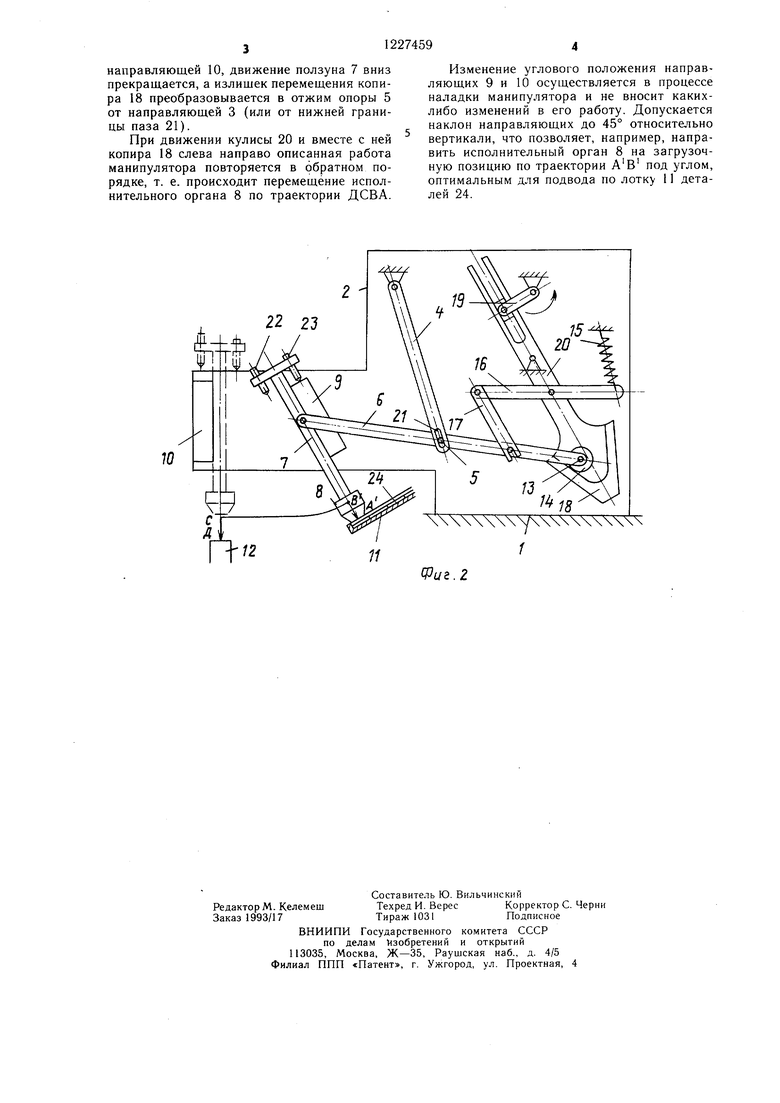
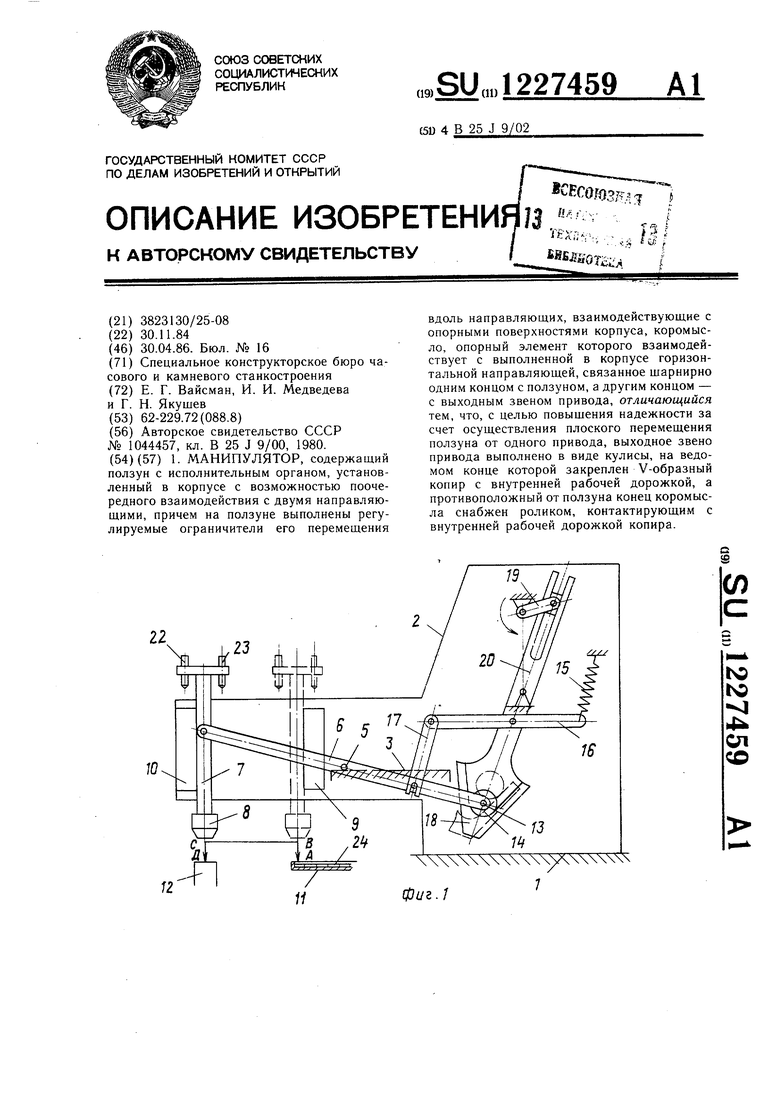
На фиг. 1 показан манипулятор, общий вид; на фиг.2 - то же, вариант исполнения.
На основании 1 (фиг. 1) смонтирован корпус 2 манипулятора, в котором в виде плоскости 3 (или рычага 4 на фиг.2) выполнена горизонтальная направляющая, с которой взаимодействует опорный элемент 5 коро- мысла 6, на котором шарнирно укреплен ползун 7 с исполнительным органом 8 (например, вакуумным схватом). На корпусе 2 смонтированы направляющие 9 и 10 перемещения ползуна на позициях захвата (из лотка 11 и установки деталей в приспособление 12. Обе направляющие 9 и 10 открыты со стороны подвода к ним ползуна 7 и укреплены на плоскости, параллельной плоскости перемещений ползуна 7, с возможностью наладочного изменения их углового положе- ния. На противоположном от ползуна конце коромысла 6 на оси 13 установлен ролик 14, поджатый пружиной 15 через шарнирно связанные звенья 16 и 17 к внутренней поверхности V-образного копира 18. Копир 18 смонтирован на горизонтально-подвижном звене - качающейся посредством кривошипа 19 кулисе 20, являющейся выходным звеном привода. Кривощип 19 приводится во вращение электродвигателем с редуктором (не показаны). Пружина 15, а также звенья 16 и 17 прижимают опору 5 коромысла 6
матической цепи, привод ползуна снабжен средством силового замыкания опорного элемента кулисы к горизонтальной направляю- ш.ей и ролика кулисы к внутренней рабочей дорожке V-образного копира, выполненного в виде двух шарнирно связанных между собой звеньев, причем одно из этих звеньев выполнено в виде двуплечего рычага с осью качания, расположенной на выходном звене привода, одно из плеч которого подпружинено относительно корпуса, а другое звено шарнирно связано с кулисой.
к направляющей 3 (или к нижней границе паза 21 в рычаге 4).
На ползуне 4 расположены регулируемые ограничители 22 и 23, определяющие конечные положения исполнительного органа 8 на позициях захвата и установки деталей 24.
Манипулятор работает следующим образом.
В исходном положении, например при захвате деталей 24 из лотка 11 (точка А траектории исполнительного органа 8), когда кулиса 20 находится в крайнем правом положении (показано на фиг.2), ползун 7 прижат к направляющей 9 до взаимодействия ее верхнего торца с ограничителем 23. При этом ролик 14 находится на левой наклонной поверхности V-образного копира 18, а опорный элемент 5 отжат вверх от направляющей 3 (или нижней границы паза 21). При движении под действием кривошипа 19 кулисы 20 справа налево ролик 14 начинает скатываться вниз в углубление копира 18. На начальном этапе этого движения опорный элемент 5 опускается (под действием пружины 15) на направляющую 3 (или нижнюю границу паза 21), после чего начинается подъем ползуна 7 с исполнительным органом 8 в точку В. Подъем ползуна 7 завершается в момент, когда ролик 14 опустится на дно V-образного углубления копира 18.
При дальнейшем перемещении кулисы влево осуществляется межпозиционное перемещение ползуна 7 с исполнительным органом 8 по траектории ВС до тех пор, пока ползун 7 не будет остановлен направляющей 10. После этого начнется опускание исполнительного органа 8 в точку за счет выжимания вверх ролика 14 правой наклонной поверхностью копира 18. После того, как ограничитель 22 коснется верхнего торца
направляющей 10, движение ползуна 7 вниз прекращается, а излищек перемещения копира 18 преобразовывается в отжим опоры 5 от направляющей 3 (или от нижней границы паза 21).
При движении кулисы 20 и вместе с ней копира 18 слева направо описанная работа манипулятора повторяется в обратном порядке, т. е. происходит перемещение исполнительного органа 8 по траектории ДСВА.
Изменение углового положения направляющих 9 и 10 осуществляется в процессе наладки манипулятора и не вносит каких- либо изменений в его работу. Допускается наклон направляющих до 45° относительно вертикали, что позволяет, например, направить исполнительный орган 8 на загрузочную позицию по траектории А В под углом, оптимальным для подвода по лотку 11 деталей 24.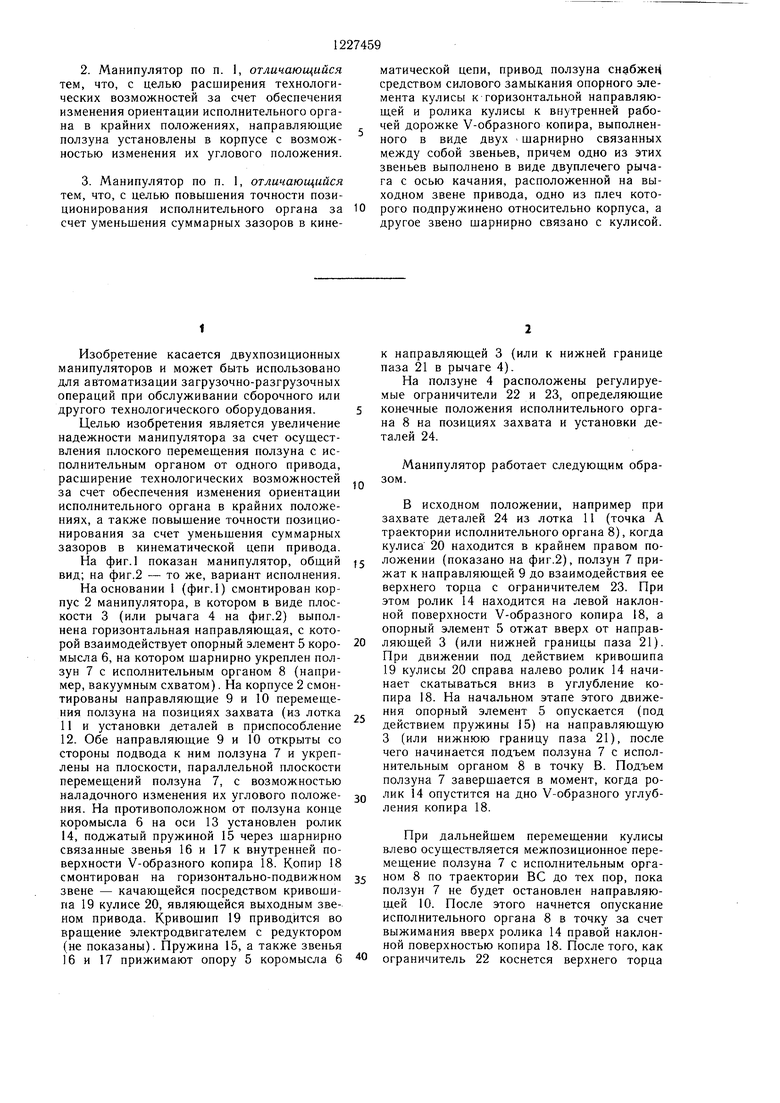
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1227460A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Манипулятор | 1976 |
|
SU766852A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Манипулятор | 1984 |
|
SU1263522A1 |
| Манипулятор | 1980 |
|
SU1044457A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
12
Vuz.2
| Манипулятор | 1980 |
|
SU1044457A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
