О1
:о
со
Изобретение относится к легкой промышленности, а именно к устройствам для автоматизации вспомогательных операций, таких как подача полуфабриката из стопы на входной транспортер проходной машины, съем полуфабриката с выходного транспортера и укладка его в стопу, передача полуфабриката с одного транспортера на другой в процессе межоперационной транспортировки, а также для решения аналогичных задач в смежных отраслях легкой ; промышленности.
Цель изобретения - повышение точности позиционирования за счет ограничения перемещений подвижных элементов.
На фиг. 1 представлена структурная схема манипулятора; на фиг. 2 - исполнительный орган, первое крайнее положение; на фиг. 3 - то же, промежуточное положение; на фиг. 4 - то же, второе крайнее положение.
Манипулятор содержит основание 1, на котором шарнирно установлены коромысла 2 и 3 и телескопический пневмоцилиндр 4 двустороннего действия. Промежуточное звено 5 и шатун 6 шарнирно соединены с коромыслами 2 и 3 и имеют обшее шарнирное соединение со штоком пневмо- цил-индра 4. Коромысло 2 связано с пружиной 7 и может совершать качательное движение, ограниченное стационарным 8 и регулируемым 9 упорами. Шатун 6 имеет Г-образную форму и на его свободном конце шарнирно установлены схваты 10 со средствами 11 их очувствления. В изогнутой части коромысла 2 и на участках взаимодействия его с упорами установлены демпфирующие элементы 12. Пружина 7 шарнирно соединена с установленной на основании резьбовой парой 13, посредством которой производится регулировка натяжения пружины.
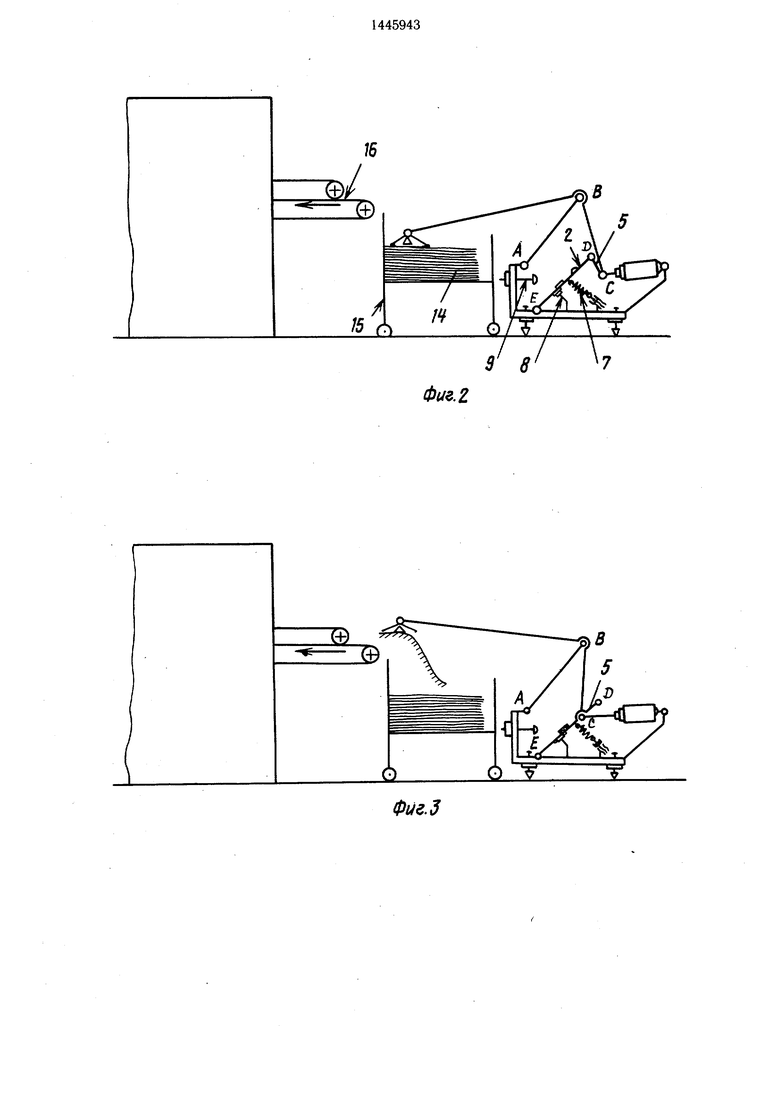
Принцип действия манипулятора, например, при подаче полуфабриката из пачки на входной транспортер проходной машины показан на фиг. 2-4.
Манипулятор работает следующим образом.
При включении манипулятора шток пнев- моцилиндра выполняет обратный ход и схваты подводятся к стопе 14, уложенной на тележке 15. Средства очувствления, касаясь поверхности полуфабриката, включают схваты переключают пневмоцилиндр на прямой
ход. При переходе из исходного положения (фиг. 2) в среднее Положение (фиг. 3) исполнительный орган манипулятора представляет собой четырехзвенник ABCDA, поскольку точка D коромысла 2, удерживаемого от перемещения пружиной 7 и упором 8, неподвижна. Схваты в этот период поднимают полуфабрикат вертикально вверх. В момент (фиг. 3) происходит преобразование структуры исполнительного органа манипулятора: промежуточное звено 5 совмещается с коромыслом 2 и образуется четырехзвенник АВСЕА, обеспечивающий при дальнейшем перемещении штока пневмоци- линдра горизонтальное перемещение схватов с полуфабрикатом над транспортером 16, на который производится укладка. В конце прямого хода (фиг. 4) коромысло 2 доходит до регулируемого упора 9 и переключает установленный на нем конечный выключатель, в результате чего схваты
отключаются и полуфабрикат укладывается на транспортер 16, а шток пневмоцилинд- ра выполняет обратный ход.
Формула изобретения
Манипулятор для загрузки-разгрузки технологических машин, содержащий основание, исполнительный орган, выполненный в виде шарнирно-рычажного механизма, имеющего два коромысла, шарнирно соединенных с основанием, и первый шатун, шарнирно соединенный с первым коромыслом и несущий на се бе захватное устройство, а также привод линейного перемещения, шарнирно соединенный с основанием, и пружину, шарнирно соединенную
одним концом с основанием, а другим - с вторым коромыслом указанного механизма, отличающийся тем, что, с целью повышения точности позиционирования за счет ограничения перемещений подвижных элементов, он снабжен вторым шатуном, один
конец которого шарнирно соединен с первым шатуном, а второй - с вторым коромыслом, а также двумя упорами, один из которых установлен на основании и взаимодействует с вторым коромыслом, а другой упор установлен на втором коромысле и взаимодействует с вторым шатуном, при этом привод линейного перемещения шарнирно связан с обоими шатунами в точке их соединения.
3 8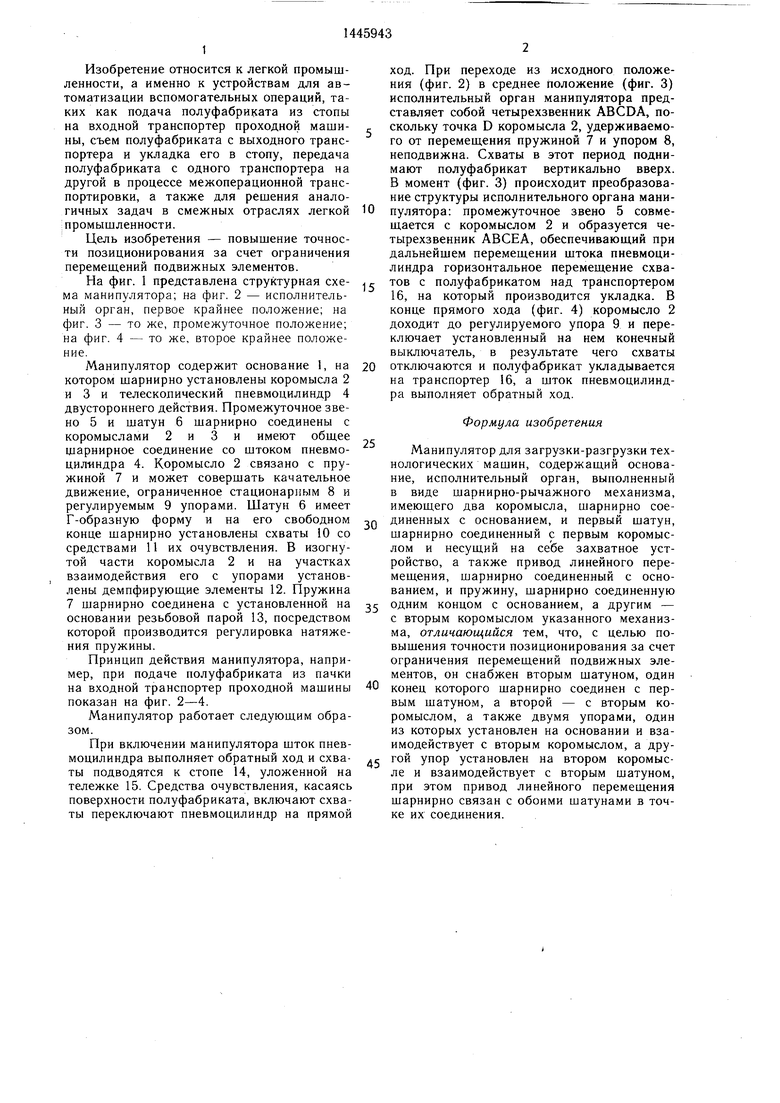
| название | год | авторы | номер документа |
|---|---|---|---|
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| Манипулятор | 1987 |
|
SU1465298A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1980 |
|
SU1044457A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |

Изобретение относится к легкой промышленности, а именно к устройствам автоматизации вспомогательных операций. Цель изобретения - повышение точности позиционирования за счет ограничения пере- меш,ений подвижных элементов. При включении манипулятора шток пневмоцилиндра 4 выполняет обратный ход и схваты подводятся к стопе. При переходе из исходного положения в среднее коромысло 2 удерживается от перемещения пружиной 7 и упором 8. Затем промежуточное звено 5 совмещается с коромыслом 2, что обеспечивает при дальнейшем перемещении штока горизонтальное движение схвата 10. В конце прямого хода коромысло 2 доходит до регулируемого упора 9. 4 ил. i (Л
Фиг. 2
Фие.З
ФигМ
| Погрузочный манипулятор | 1982 |
|
SU1073087A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
