Изобретение относится к средствам автоматизации технологических процессов в горно-добывающей промышленности.
Известно устройство для управления роторным экскаватором, которое предназначено для обеспечения дозированной подачи поворота роторной стрелы путем формирования команд на останов привода. Это устройство включает задатчик подачи со схемой совпадения, к входу которого через счетный блок подключен датчик приращения перемещения, а выход задатчика - к формирователю команд, выходы которого подключены к механизму поворота и входу формирователя сброса счетного блока. В момент когда значение приращения угла поворота роторной стрелы совпадает с установкой на задатчике, на выходе схемы совпадения образуется потенциал, который обуславливает срабатывание формирователя команд, обеспечивающих отключение цепи питания контакторов привода поворота и сброса регистров блока счетчика в нулевое положение.
Принцип управления, реализованный в устройстве, основан на допущении, что величина пути, проходимого роторной стрелой за.время торможения, пренебрежимо мала по сравнению с величиной заданного перемещения, и изменение тормозного пути от «дозы к «дозе существенного влияния на точность отработки задания не имеет 1.
Однако в некоторых механизмах роторных экскаваторов, например механизме хода экскаватора, которые по технологическим требованиям должны обеспечивать режим дозированной подачи, путь торможения сравним с величиной заданного перемещения, и неучет тормозного пути приводит к недопустимой ощибке при отработке задания.
Наиболее близким к изобретению по технической сущности является устройство управления механизмом подачи рабочего органа роторного экскаватора, содержащее задатчик подачи, подключенный к блоку вычитания, датчик скорости, подключенный к квадратору и нуль-орган, к входу которого через квадратор подключен тахогенератор, а выход нуль-органа подключен к первому входу регулятора скорости испиЛнительного электропривода. В этом устройстве сигнал на отключение привода поступает с упреждением, определяемым временем торможения механизма 2.
Недостатком известного устройства является низкая точность отработки задания. После выдачи команды на остановку механизма устройство выключается из работы, а так как. ускорение замедления во время остановки не является постоянной величиной и резко колеблется р зависимости от возмущающих факторов, то это приводит к неточности управления. Причем устройству
присущи кинематическая погрещность и низкая надежность.
Указанные недостатки снижают эффективность применения устройства на меха5 низмах подачи роторных экскаваторов большой производительности, время замедления механизмов подачи которых сравнимо с времене.м отработки задания.
Целью изобретения является повыщение точности управления рабочим органом роторного экскаватора.
Эта цель достигается тем, что в устройстве управления механизмом подачи рабочего органа роторного экскаватора, содер5 жащее задатчик подачи, подключенный к блоку вычитания, датчик скорости, подключенный к квадратору и нуль-орган, подключенный к первому входу регулятора скорости исполнительного электропривода, дополнительно введены интегратор, блок деления
0 и элемент сравнения, а выходы квадратора и блока вычитания подключены к соответствующим входам блока, деления, выход которого подключен к первым входам элемента сравнения и нуль-органа, к вторым вхо5 дам которых подключен источник питания, при этом выход элемента сравнения подключен к второму входу регулятора скорости. Вход интегратора подключен к датчику скорости, а выход - к блоку вычитания.
Q На чертеже изображена функциональная блок-схема устройства.
Датчик 1 пути, состоящий из датчика 2 скорости, подключенного к входу интегратора 3, подключен к входу вычитаемого блока 4 вычитания, к входу уменьшаемого которого подключен задатчик 5 подачи. Выход блока 4 вычитания подключен к входу делителя блока 6 деления, к входу делимого которого подключен выход квадратора 7, вход которого подключен к датчику 2 скорости. Выход блока 6 деления подключен к одному
из входов нуль-,органа 8 и элемента 9 сравнения, вторые входы которых подключены к источнику питания. Выходы нуль-органа 8 и элемента 9 сравнения подключены каждый к своему входу регулятора 10 скорости
5 исполнительного электропривода.
Устройство работает следующим образом.
Сигнал с датчика 2 скорости поступает на входы квадратора 7 и интегратора 3, с
0 выхода которого сигнал, пропорциональный пройденному рабочим органом пути, поступает на вход б-юка 4 вычитания, где вычитается из поступающего на второй вход с задачткаи 5 подачи сигнала, пропорционального установленной оператором величи5 не подачи. С квадратора 7 сигнал, пропорциональный квадрату текущего значения скорости рабочего органа, поступает на вход делимого блока 6 деления, на вход делителя которого поступает с выхода блока 4 вычитания сигиал, пропорциональный разности значений заданной подачи и пройденного рабочим органом пути. На выходе блока деления получают, как .частное от деления квадрата текущего значения скорости на разность заданного и пройденного пути, сигнал, соответствующий ускорению равнозамедленного движения рабочего органа при возможной остановке его на оставшемся отрезке пути. Этот сигнал поступает на один вход нуль-органа 8 и элемента 9 сравнения. На вторые входы нуль-органа 8 и элемента
9сравнения поступает от источника питания сигнал, уровень которого выбран в соответствии со значением ускорения замедления для данного механизма.
При равенстве уровней сигналов, поступающих от источника питания и с выхода блока 6 деления, происходит срабатывание нуль-органа 8, и на один вход регулятора
10скорости исполнительного электропривода поступает импульс, используемый для снятия задающего сигнала регулятора 10 скорости исполнительного электропривода и деблокирования прохождения сигнала с элемента 9 сравнения по второму входу регулятора 10 скорости исполнительного электропривода. Механизм замедляется. В случае отклонения уровня сигнала, получаемого на выходе блока 6 деления, от уровня сигнала, поступающего от источника питания, с элемента 9 сравнения на вход регулятора 10 скорости исполнительного электропри5 вода поступает корректирующий сигнал, обеспечивающий остановку механизма с оптимальным ускорением, заданным уровнем сигнала, поступающим от ис-точника питания.
0 Для осуществления последующей подачи необходимо повторно произвести включение исполнительного электропривода. При этом интегратор 3 автоматически устанавливается в нуль, а нуль-орган возвращается в первоначальное состояние из-за неравен5 ства сигналов на его входе.
Таким образом, предложенное устройство управления механизмоч подачи позволит снизить потери производительности роторного экскаватора за счет более точной установки рабочего органа на толщину срезаемой стружки при одновременном повышении показателей надежности и улучщении условий работы персонала. Повыщение производительности роторного экскаватора при внедрении системы управления механизмом
5 подачи на базе предлагаемого устройства составит 0,3%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1988 |
|
SU1601290A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Устройство для управления температурным режимом индукционной печи | 1983 |
|
SU1095150A1 |
| Система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения | 1982 |
|
SU1065021A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Система автоматической стабилизации плотности пульпы в сливе классификатора при мокром процессе измельчения | 1984 |
|
SU1260022A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Устройство для управления температурным режимом индукционной печи | 1986 |
|
SU1368867A2 |
| Электропривод | 1985 |
|
SU1332427A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ПОДАЧИ РАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА, содержащее задатчик подачи, подключенный к блоку вцчитания, датчик скорости, подключенный к квадратору, и нуль-орган, подключенный к первому входу регулятора скорости исполнительного электропривода, отличающееся тем, что, с целью повышения точности управления, в него дополнительно введены интегратор, блок деления и элемент сравнения, а выходы квадратора и блока вычитания подключены к соответствуюш,им входам блока деления, выход которого подключен к первым входам элемента сравнения и нуль-органа, к вторым входам которых подключен источник питания, при этом выход элемента сравнения подключен к второму входу регулятора скорости, вход интегратора подключен к датчику скорости, а выход - к блоку вычитания. со со СП со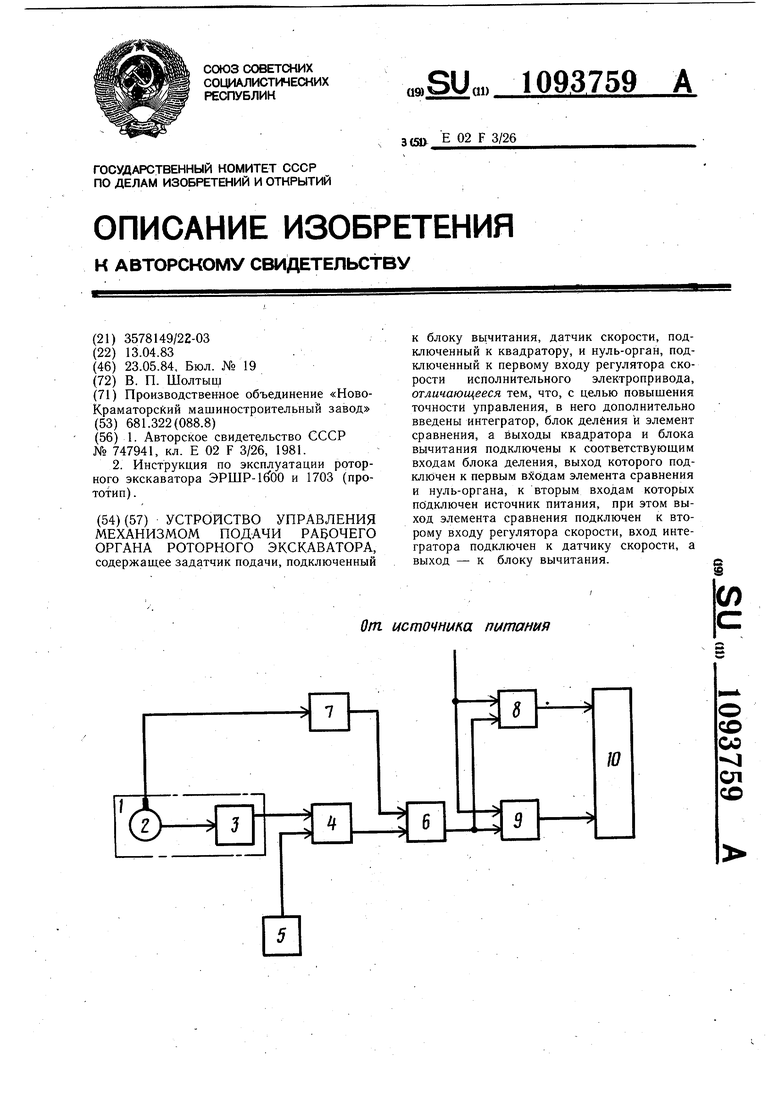
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
