магнитного потока и блока 22 преобразований магнитных потоков. Датчик 15 установлен в воздушном зазоре асинхронного двигателя (АД) 1 с фазным ротором. В электроприводе благодаря введению указанных блоков осуществляется контроль ортогональности векторов тока статора и результирующего магнитного потока воздушного зазора АД 1. При зтом достигается максимальное значение электромагнитного вра.1
Изобретение относится к электротехнике, а именно к управляемым электроприводам, построенным на основе асинхронных двигателей с фазным ротором, и может быть использовано, например, в гребных электрических установках ледоколов, в тяговом электроприводе, где возможен режим упора большие перегрузки по моменту и требуется глубокое регулирование скорости.
Цель изобретения - повышение перегрузочной способности электропривода путем поддержания ортогональности результирующих векторов тока якоря и магнитного потока воздушного зазора.
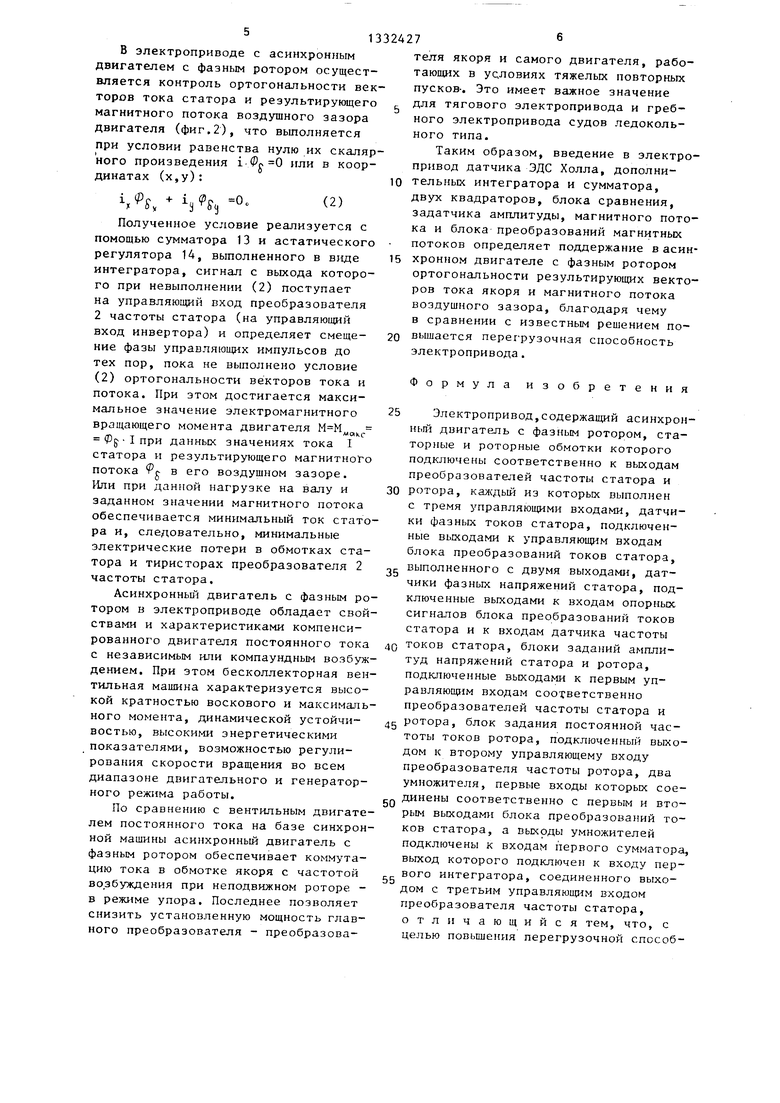
На фиг.1 представлена функциональная схема электропривода; на фиг.2 - векторная диаграмма для асинхронного двигателя с фазным ротором.
Электропривод содержит асинхронный двигатель 1 (фиг.1) с фазным ротором, статорные и роторные обмотки которого подключены соответственно к выходам преобразователя 2 частоты статора и преобразователя 3 частоты ротора, каждый из которых выполнен с тремя управляющими входами, датчики 4 фазных токов статора, подключенные выходами к управляющим входам блока 5 преобразований токов статора датчики 6 фазных напряжений статора, подключенные выходами к входам для опорных сигналов блока 5 преобразований токов статора и к входам датчика, 7 частоты токов статора, выход которого подключен к второму управляющему входу преобразователя 2 частоты статора, блоки 8 и 9 заданий
щающего момента АД 1 при данных значениях тока статора АД 1 и результирующего магнитного потока в воздушном зазоре АД 1 или обеспечивается минимальный ток статора при данной нагрузке на валу АД 1 и заданном значении магнитного потока. Последнее приводит к-снижению электрических потерь в обмотках статора АД 1 и тиристорах преобразователя 2 частоты. 2 ил.
амплитуд напряжений статора и ротора, подключенные выходами к первым управляющим входам соответственно преобразователей 2 и 3 частоты статора и ротора, блок 10 заданий постоянной частоты токов ротора, подключенный выходом к второму управляющему входу преобразователя 3 частоты ротора,
умножитель 11, первый вход которого соединен с первым выходом блока 5 преобразований токов статора, умножитель 12, первый вход которого соединен с вторым выходом блока 5 преобразований токов статора, а выходы умножителей 11 и 12 подключены к входам первого сумматора 13, выход которого подключен к входу первого интегратора 14, соединенного выходом с
третьим управляющим входом преобразователя 2 частоты статора,
В электропривод введены датчик ЭДС Холла 15, установленньш в воздушном зазоре асинхронного двигателя с
фазным ротором, второй интегратор 16, квадраторы 17 и 18, второй сумматор 19, блок 20 сравнения,задатчик 21 амплитуды магнитного потока и блок 22 преобразований магнитных потоков
воздушного зазора, входы которого
подключены к выходам датчика ЭДС Холла 15 и к выходам датчика 6 фазных напряжений статора, а выходы - к входам квадраторов 17 и 18,выходы которых подключены к входам второго сумматора 19, соединенного выходом с входом блока 20 сравнения, к другому входу которого подключен выход задат- чика 21 амплитуды магнитного потока,
При этом выход блока 20 сравнения
ра 16, соединенного выходом с третьим управляющим входом преобразователя 3 частоты ротора.
Электропривод работает следующим образом.
Регулирование скорости вращения осуществляется по двум каналам.
По первому каналу (якорного регули- д Холла 15, пропорциональные величи- рования) блок 8 задания амплитуды нам магнитных потоков , P , . напряжения статора воздействует на воздушного зазора по осям фаз обмо- фазу управления выпрямительного зве- ток статора (или Ф и Ра - по двум, на преобразователя 2 частоты статора и регулирует тем самым его выходное напряжение. По второму каналу (регулирование возбуждения) блок 9 задания амплитуды напряжения ротора опосям статора), преобразуются с помо- 15 щью блока 22 преобразований магнитных потоков в составляющие r jj- ,,,5 нулевой частоты, представленные в осях X и у, синхронно вращающихся
ределяет амплитуды выходного напря- с полем двигателя. После возведения жения преобразователя 3 частоты ррто- 2о квадрат составляющих магнитного
ра.
При подаче напряжения питания на
преобразователи частоты статора 2 и
ротора 3 блок 10 задания постоянной
частоты токов ротора (задает посто- 25 ного потока (Р в воздушном зазоре явную частоту порядка 3-5 Гц) открывает управляемые вентили (тиристоры)
потока к квадраторах 17 и 18 и сум шpoвaпия их во втором сумматоре 1 входной сигнал с последнего, пропо циональный квадрату амгшитуды магн
двигателя 1, поступает на вход бло 20 сравнения. На другой вход послед
него поступает сигнал от задатчика 21 амплитуды магнитного потока
ЭаЛ.
преобразователя 3 частоты ротора и по обмотке ротора асинхронного двигателя 1 начинает протекать трехфаз- зо воздушном зазоре двигателя. С выхо- ный низкочастотный ток возбуждения, да блока 20 сравнения сигнал рассог- создающий вращающееся магнитное поле. ласования + , с помощью астатичесТак как вначале ротор асинхронного кого регулятора 16, выполненного в двигателя 1 неподвижен, то от датчи- виде интегратора, преобразуется в ка 7 частоты токов статора, подключенного к датчику 6 фазных напряжений, на управляющей вход преобразо- преобразователя 3 частоты ротора (на вателя 2 частоты статора (на управ- вход его выпрямительного звена) и
так изменяет величину тока возбужсигнал напряжения смещения + Д (J (, и подается на третий управляющий вход
. ляющий вход инвентора) поступают . сигналы управления с частотой питания ротора со. , открывающие управляемые вентили. При этом на обмотке статора асинхронного двигателя 1 протекает трехфазный ток и создается
вращающееся магнитное поле, которое при вращении в одном направлении и с одинаковой скоростью с полем ротора взаимодействует с ним, создавая вращающий момент. Когда последний превысит момент сопротивления нагрузки ротор асинхронного двигателя 1 начнет вращаться.
С выхода датчика 7 частоты токов статора снимается посЛе этого сигнал
40 Дения 1
тока намагничения ..
45
чтобы обеспечить постоянство результирующего магнитного потока в в)здуш- ном зазоре машины fL /1 const в
о о
соответствии с заданной величиной. Одновременно выходные сигналы с датчика 4 фазных токов статора преобразуются с помощью блока 3 преобразований токов статора в составляющие нулевой частоты i, i,., представленные в осях X и у. Выходные сигналы с блока 22 преобразований магнитньк потоков, представляющие собой составляющие нулевой частоты Р .f r , и токи ij|., 1„ поступают на умножители 11 и 12, осуществляющие перемножение од50
соответствии с заданной величиной. Одновременно выходные сигналы с датчика 4 фазных токов статора прео разуются с помощью блока 3 преобраз ваний токов статора в составляющие нулевой частоты i, i,., представлен ные в осях X и у. Выходные сигналы с блока 22 преобразований магнитньк потоков, представляющие собой соста ляющие нулевой частоты Р .f r , и то ки ij|., 1„ поступают на умножители 1 и 12, осуществляющие перемножение о
с частотой, равной сумме или разности частот вращения со и питания рото- ноименных составляющих потока ра Q , т.е. U , (1)тока i, и таким образом на выходе
поступающий на управляющий вход преоб- умножителя 11 получают Pjn к на разователя 2 частоты статора и обеспе- выходе умножителя 12 iu .
ния магнитных полей статора и ротора.
При тяжелых пусках или перегрузках двигателя включается система ограничения предельного результирующего магнитного потока в его воздушном зазоре. Выходные сигналы с датчи Холла 15, пропорциональные величи- нам магнитных потоков , P , . воздушного зазора по осям фаз обмо- ток статора (или Ф и Ра - по двум,
осям статора), преобразуются с помо- щью блока 22 преобразований магнитных потоков в составляющие r jj- ,,,5 нулевой частоты, представленные в осях X и у, синхронно вращающихся
ного потока (Р в воздушном зазоре
потока к квадраторах 17 и 18 и сум- шpoвaпия их во втором сумматоре 19 входной сигнал с последнего, пропорциональный квадрату амгшитуды магнитного потока (Р в воздушном зазоре
двигателя 1, поступает на вход блока 20 сравнения. На другой вход последнего поступает сигнал от задатчика 21 амплитуды магнитного потока
ЭаЛ.
воздушном зазоре двигателя. С выхо да блока 20 сравнения сигнал рассог- ласования + , с помощью астатического регулятора 16, выполненного в виде интегратора, преобразуется в преобразователя 3 частоты ротора (на вход его выпрямительного звена) и
сигнал напряжения смещения + Д (J (, и подается на третий управляющий вход
0 Дения 1
тока намагничения ..
5
чтобы обеспечить постоянство результирующего магнитного потока в в)здуш- ном зазоре машины fL /1 const в
о о
соответствии с заданной величиной. Одновременно выходные сигналы с датчика 4 фазных токов статора преобразуются с помощью блока 3 преобразований токов статора в составляющие нулевой частоты i, i,., представленные в осях X и у. Выходные сигналы с блока 22 преобразований магнитньк потоков, представляющие собой составляющие нулевой частоты Р .f r , и токи ij|., 1„ поступают на умножители 11 и 12, осуществляющие перемножение од0
ноименных составляющих потока тока i, и таким образом на выходе
в электроприводе с асинхронным двигателем с фазным ротором осуществляется контроль ортогональности векторов тока статора и результирующего магнитного потока воздушного зазора двигателя (фиг.2), что выполняется при условии равенства нулю их скалярного произведения .0 или в координатах (х,у):
.Р(
+ 1,
S, 0.
(2)
у 1 ИЗ
Полученное условие реализуется с помощью сумматора 13 и астатического регулятора 14, вьшолнеииого в виде интегратора, сигнал с выхода которого при невыполнении (2) поступает на управляющий вход преобразователя 2 частоты статора (на управляющий вход инвертора) и определяет смещение фазы управляющих импульсов до тех пор, пока не выполнено условие (2) ортогональности векторов тока и потока. При этом достигается максимальное значение электромагнитного вращающего момента двигателя ,д| Р I при данных значениях тока I статора и результирующего магнитного потока Pf- в его воздушном зазоре. Или при данной нагрузке на валу и заданном значении магнитного потока обеспечивается минимальный ток статора и, следовательно, минимальные электрические потери в обмотках статора и тиристорах преобразователя 2 частоты статора.
Асинхронньо двигатель с фазным ротором в электроприводе обладает свойствами и характеристиками компенсированного двигателя постоянного тока с независимым или компаундным возбуждением. При этом бесколлекторная вентильная машина характеризуется высокой кратностью воскового и максимального момента, динамической устойчивостью, высокими энергетическими показателями, возможностью регулирования скорости вращения во всем диапазоне двигательного и генераторного режима работы.
По сравнению с вентильным двигателем постоянного тока на базе синхронной машины асинхронный двигатель с фазным ротором обеспечивает коммутацию тока в обмотке якоря с частотой возбуждения при неподвижном роторе - в режиме упора. Последнее позволяет снизить установленную мощность главного преобразователя - преобразова
2427
теля якоря и самого двигателя, работающих в условиях тяжельк повторных пусков-. Это имеет важное значение
, для тягового электропривода и греб- ь
ного электропривода судов ледокольного типа.
Таким образом, введение в электропривод датчика ЭДС Холла, дополни- 10 тельных интегратора и сумматора, двух квадраторов, блока сравнения, задатчика амплитуды, магнитного потока и блока преобразований магнитных потоков определяет поддержание в асин- 15 хронном двигателе с фазным ротором ортогональности результирующих векторов тока якоря и магнитного потока воздушного зазора, благодаря чему в сравнении с известным решением по- 20 вышается перег рузочная способность электропривода.
Формула изобретения
5
0
5
0
Электропривод,содержащий асинхрон- ньм двигатель с фазным ротором, ста- торные и роторные обмотки которого подключены соответственно к выходам преобразователей частоты статора и ротора, каждый из которых выполнен с тремя управляющими входами, датчики фазных токов статора, подключенные выходами к управляющим входам блока преобразований токов статора, выполненного с двумя выходами, датчики фазных напряжений статора, подключенные выходами к входам опорных сигналов блока преобразований токов статора и к входам датчика частоты токов статора, блоки заданий амплитуд напряжений статора и ротора, подключенные выходами к первым управляющим входам соответственно преобразователей частоты статора и g ротора, блок задания постоянной частоты токов ротора, подключенный выходом к второму управляющему входу преобразователя частоты ротора, два умножителя, первые входы которых соединены соответственно с первым и вторым выходами блока преобразований токов статора, а выходы умножителей подключены к входам первого сумматора, выход которого подключен к входу первого интегратора, соединенного выходом с третьим управляющим входом преобразователя частоты статора, отличающийся тем, что, с целью повышения перегрузочной способ0
5
ности путем поддержания в асинхронном двигателе с фазным ротором ортогональности результирующих векторов тока якоря и магнитного потока воздушного зазора, введены датчик ЭДС Холла, установленный в воздушном зазоре асинхронного двигателя с фазным ротором, второй интегратор, два квадратора, второй сумматор, блок сравнения, задатчик амплитуды магнитного потока и блок преобразований магнитных потоков воздушного зазора, входы которого подключены к выходам датчика ЭДС Холла и к выходам датчи
ков фазных напряжений статора, а выходы - к вторым входам двух умножителей и к входам двух квадраторов, выходы которых подключены к входам второго сумматора, соединенного выходом с одним входом блока сравнения, к другому входу которого подключен выход задатчика амплитуды магнитного потока, при этом выход блока сравнения подключен к входу второго интегратора , соединенного выходом с третьим управляющим входом преобразователя частоты ротора.
Iff
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU649114A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод переменного тока | 1987 |
|
SU1429273A1 |
Изобретение относится к электротехнике и может быть использовано в гребных электрических установках ледоколов, в тяговом электроприводе. Целью изобретения является повьппе- ние перегрузочной способности электрет -.привода. Указанная цель достигается введением в электропривод датчика 15 ЭДС Холла, интегратора 16, квадраторов 17, 18, сумматора 19, блока 20 сравнения, задатчика 21 амплитуды сл U) со ю iU ю Фи&1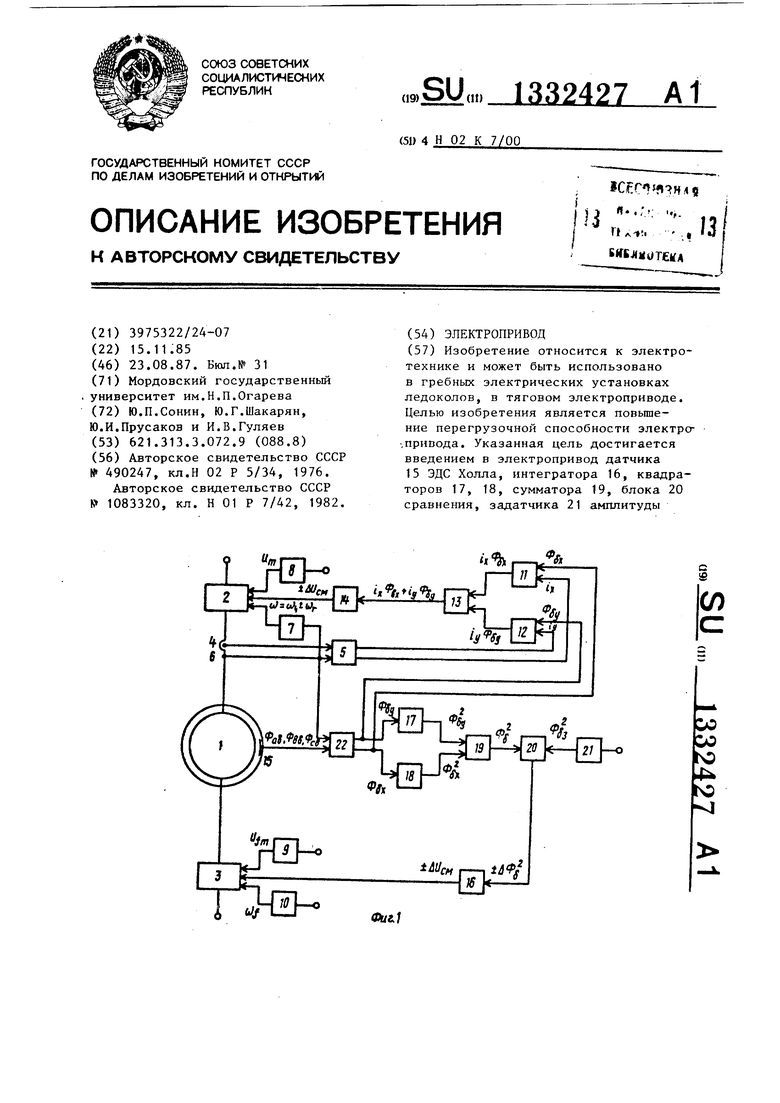
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
