Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| Устройство для автоматического нивелирования | 1986 |
|
SU1388726A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
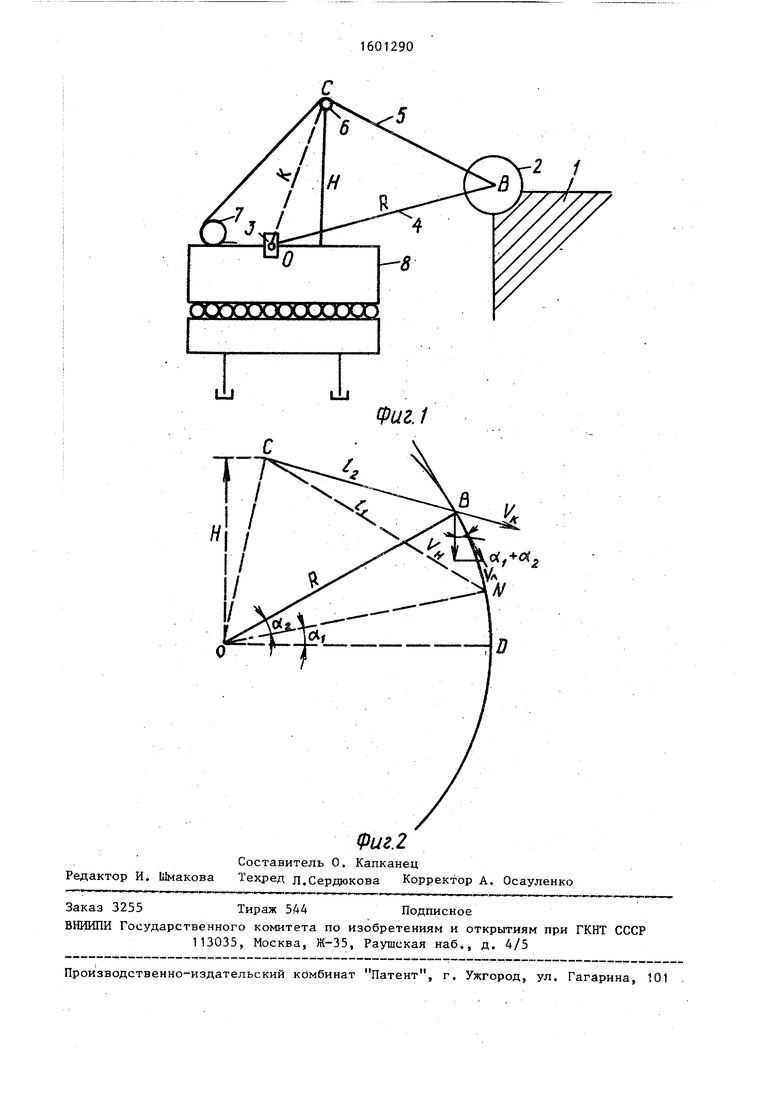
Изобретение относится к автоматизации технологических процессов в горнодобывающей промышленности. Цель - повышение точности дозированной подачи рабочего органа (РО) роторного экскаватора при экскавации уступа горизонтальными стружками. Для этого устройство снабжено дополнительно датчиком 3 угла и функциональным преобразователем (ФП) 10. К соответствующим входам ФП 10 подключены датчики скорости 9 и угла 3, а выход ФП 10 соединен с входами квадратора 15 и интегратора 11. Выход интегратора 11 подключен к одному из входов блока 12 вычитания, к второму входу которого подключен задатчик 13 подачи. Выходы квадратора 15 и блока 12 подключены к входам блока 14 деления, где происходит деление квадрата скорректированного текущего значения скорости РО на разность заданной величины подачи и пройденного РО 2 пути. На выходе блока 14 деления получают сигнал, соответствующий ускорению равнозамедленного движения РО при возможной остановке его на оставшемся отрезке пути. Этот сигнал поступает на один из входов нуль-органа 16 и элементы 17 сравнения. На вторые их входы поступает сигнал от источника питания, уровень которого выбран в соответствии со значением ускорения замедления для механизма подачи РО. По сигналу рассогласования на вход регулятора 18 поступает корректирующий сигнал, обеспечивающий замедление или остановку механизма подачи с оптимальным заданным ускорением. 3 ил.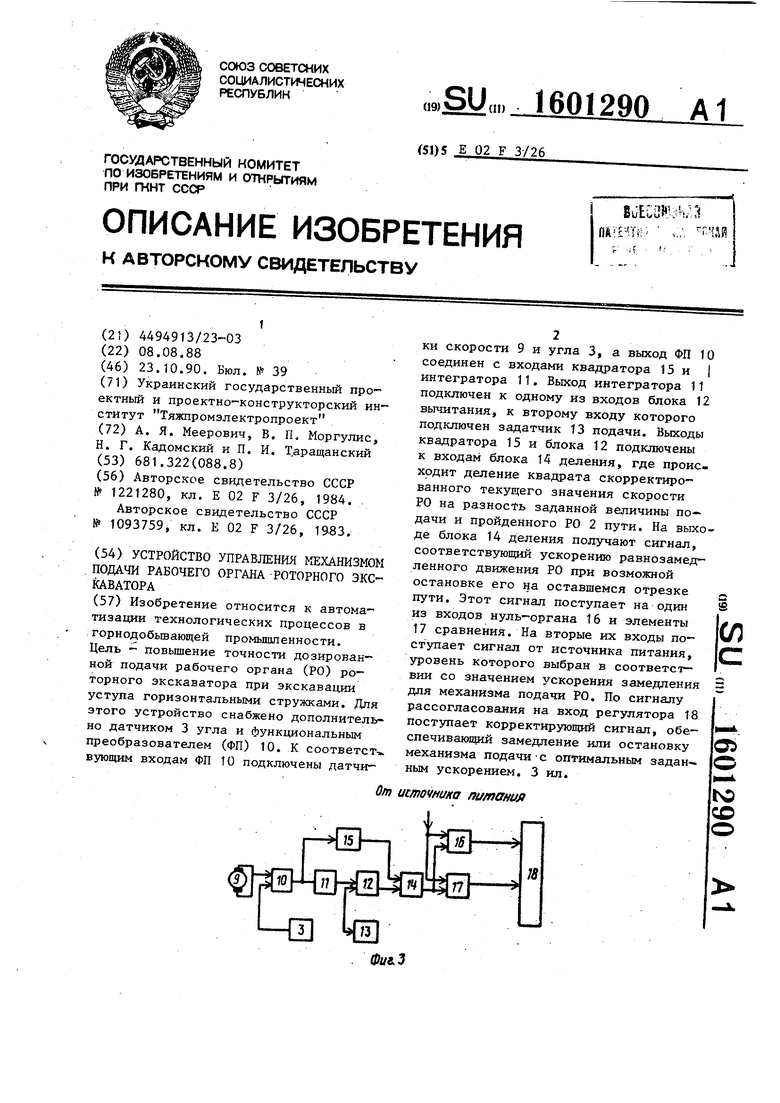
| Устройство для автоматического управления роторным экскаватором | 1984 |
|
SU1221280A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| попл УПРАВЛЕНИЯ МЕХАНИЗМОМ .ПОДАЧИ РАБОЧЕГО ОРГАНА РОТОРНОГО ЭКС- КАВАТОРА | |||
