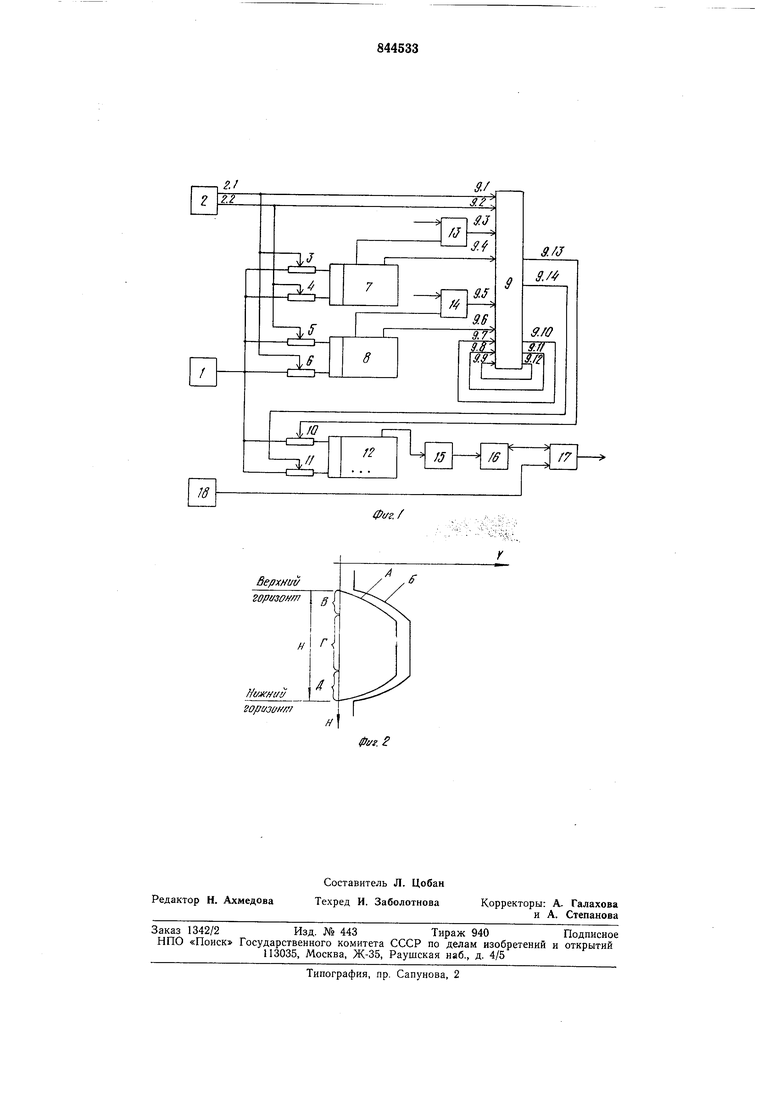
лом 2 выбора направления перемещения шины 3-6 сложения и вычитания подключены входы сложения и вычитания (счетные входы) реверсивного счетчика 7 (счетчик пути «вперед) и реверсивного счетчика 8 (счетчик пути «назад), а через управляемые анализируюпдим блоком 9 шины 10 и И--входы реверсивного счетчика 12. По шинам 2.1 и 2.2 узла 2 на счетчики 3-6 поступают команды соответственно «вперед и «назад.
Выходы счетчиков 7 и 8 включены на вход блоков 13 и 14 сравнения, выходы которых вместе с выходами счетчиков 7 и 8 и выходом узла 2 выбора направления перемеш,ения соединены с входами анализируюш,его блока 9.
К выходу счетчика 12 подключена цепь из последовательно соединенных преобразователя 15 «код-напряжение и функционального преобразователя 16, выход которого является выходом формирователя и может быть подключен в схемах ограничителей скорости к узлу 17 сравнения, второй вход которого соединен с выходом датчика 18 скорости.
Формирователь эталонной скорости работает следуюш,им образом.
Рассматривается случай, когда необходимо осуш,ествить иеремешение подъемного сосуда в направлении «вперед (подъем груза с нижнего горизонта на верхний) по рабочей диаграмме А скорости, приведенной на фиг. 2. Там же приведена защитная диаграмма Б скорости, которая должна быть сформирована формирователем эталонной скорости. При наличии команды па движение «вперед счетчик 7 обнуляется, а в счетчик 8 заносится число, равное в масштабе путевых импульсов расстоянию между крайними точками ствола. Командой «вперед по шине 2.1 узла 2 выбора направления разрешено прохождение сигналов от импульсного датчика 1 перемещения по шине 3 к входу сложения счетчика 7, а по шине 6 - к входу вычитания счетчика 8. Благодаря этому счетчик 7 подготовлен к режиму сложения, а счетчик 8 - к режиму вычитания поступающих импульсов. При отработке режима «иазад картина будет обратная.
Таким образом, выполненная схема включения счетчиков позволяет в текущий момент времени иметь два результата отработки заданного перемещения. Для рассматриваемого случая движения «вперед на счетчике 7 фиксируется пройдеииое расстояние, на счетчике 8 - оставшееся.
Показания счетчиков 7 и 8 анализируются с помощью блоков 13 и 14 сравнения на равенство, на вторые входы которых поступает в цифровом коде величина, равная расстоянию, необходимому для разгона сосуда до максимальной скорости. В случае равенства кодов на выходах блоков 13 и 14
сравнения вырабатываются сигналы, которые поступают на входы блока 9, выполненного, например, на базе автомата Мура. Последний в соответствии с собственным
алгоритмом и значениями сигналов на его входах 9.1-9.9 вырабатывает сигналы на выходах 9.10, 9.11 и 9.12, каждый из которых указывает о нахождении подъемного сосуда в той или иной зоне ствола. При
этом сигнал на выходе 9.10 указывает о нахождении сосуда в зоне В между отметкой верхнего горизонта и точкой начала замедления (для режима «вперед) или, что то же самое, точкой окончания разгона
(для режима «назад); сигнал на выходе 9.11 свидетельствует о нахождении сосуда в зоне Г равномерного движения, сигнал на выходе 9.12 - о нахождении сосуда в зоие Д между отметкой нижнего горизонта и
точкой окончания разгона (для режима «вперед) и, что то же самое, точкой начала замедления для режима «назад. Зоны действия сигналов показаны на фиг. 2. Блок 9 вырабатывает также команды
«сложить и «вычесть, являющиеся результатом отработки системы булевых функций, получаемые на выходах 9.13 и 9.14 соответственно.
Указанные команды поступают на шииы
10 и 11, которые соединяют входы сложения или вычитания реверсивного счетчика 12 с импульсным датчиком 1 перемещения. Для рассматриваемого случая - пускмашипы с нижнего горизонта в направлении «вперед, счетчик 7 обнулен и с его выхода поступает сигнал на вход блока 9, который соответственно вырабатывает сигналы на выходах 9.12 и 9.13. Указанный сигнал разрешит прохождение перемещения с датчика 1 но шине 10 на вход сложения счетчика 12, который будет осуществлять операцию сложения поступающих импульсов или, другими словами, фиксировать
пройденное расстояние в период разгона. Емкость счетчика 12 выбирается равной перемещению сосуда при разгоне до максимальной скорости. Информация в цифровом виде на выходах счетчика 12 с помощью преобразователя 15 «код-напряжение преобразуется в аналоговую форму и подается на вход функционального преобразователя 16, реализующего защитную диаграмму скорости в функции пути.
Выходное напряжение преобразователя 16 поступает на вход узла 17 сравнения, на второй вход которого подается сигнал с датчика 18 скорости. В случае превышения действительной скорости относительно допустимой узел 17 вырабатывает сигнал аварийной ситуации для последующей отработки системой автоматического управления приводо.м подъемной машины. Число, поступающее на один из входов
блоков 13 и 14 сравнения, также выбирается равным пути, который пройдет сосуд в период разгона до максимальной скорости.
В момент равенства указанного числа и показаний счетчика 7 блоком 13 сравнения будет выработан сигнал, с приходом которого блок 9 сформирует сигнал на выходе 9.11, означающий, что сосуд находится в зоне равномерного движения. При этом исчезает сигнал на выходе 9.13 блока 9 и соответственно прекращается сложение счетчиком 12 импульсов перемещения по шине 10.
В момент времени, когда показания счетчика 8, фиксирующего рставщееся- расстояние, станут равными числу на блоке 14 сравнения, последним будет сформирован сигнал, с приходом , которого блок 9 вырабатывает сигнал на выходе 9.10, свидетельствующий о переходе сосуда в зону замедления вблизи верхнего горизонта, и сигнал на выходе 9.14, разрещающий прохождение по щине 11 сигналов с импульсного датчика 1 на вход вычитания счетчика 12. Последний переходит в режим вычитания и по мере приближения к верхнему горизонту число на его выходе уменьщается. Соответственно, снижается его аналоговое значение на выходе преобразователя 15 «код-напряжение и величина допустимой скорости на выходе функционального преобразователя 16. С приходом сосуда на отметку верхнего горизонта счетчиком 8 генерируется осведомительный сигнал, а в счетчике 7 фиксируется число, равное расстоянию между горизонтами. Другими словами, устройство готово к последующему перемещению между горизонтами в направлении «назад. При этом будет иметь место обратная описанному картина. Счетчик 8 будет фиксировать пройденное расстояние, счетчик 7 - оставшееся.
Наладка и приведение устройства в эксплуатационную готовность могут быть произведены без включения подъемной машины лишь на основании данных об отметках крайних горизонтов и заданных параметров движения.
Устройство удобно в эксплуатации и обеспечивает высокую точность и надежность в работе.
Формула изобретения
Формирователь эталонной скорости для устройств защиты щахтных подъемных установок, содержащий импульсный датчик перемещения, подключенный через шины сложения и вычитания, управляемые узлом выбора направления, к входам сложения и вычитания одного из реверсивных счетчиков и через шины сложения и вычитания, управляемые анализирующим блоком, к входам сложения и вычитания другого реверсивного счетчика, к выходу которого подключены соединенные последовательно
преобразователь «код-напряжение и функциональный преобразователь, выход которого является выходом формирователя, отличающийся тем, что, с целью упрощения перестройки при изменении условий
работы шахтной подъемной установки, он снабжен задатчиками пути разгона, блоками сравнения и дополнительным реверсивным счетчиком, входы сложения и вычитания которого через шины сложения и вычитания, управляемые узлом выбора направления, подключены к импульсному датчику перемещения, а один и другой выходы - к одному из входов соответственно анализирующего блока и одного из блоков сравнения, другой вход которого соединен с одним из задатчиков пути разгона, а выход - с вторым входом анализирующего блока, остальные Вхходы которого соединены с выходами узла выбора направления, второго
блока сравнения и одним из выходов первого реверсивного счетчика, другой выход которого соединен с одним из входов второго блока сравнения, подключенного другим входом к второму задатчику пути
разгона.
Источники информации, принятые во внимание при экспертизе 1. Белоцерковский А. А. и др. Использование магнитной записи на канате для управления многоканатными подъемными установками. «Механизация и автоматизация производства, 1971, № 6 (прототип).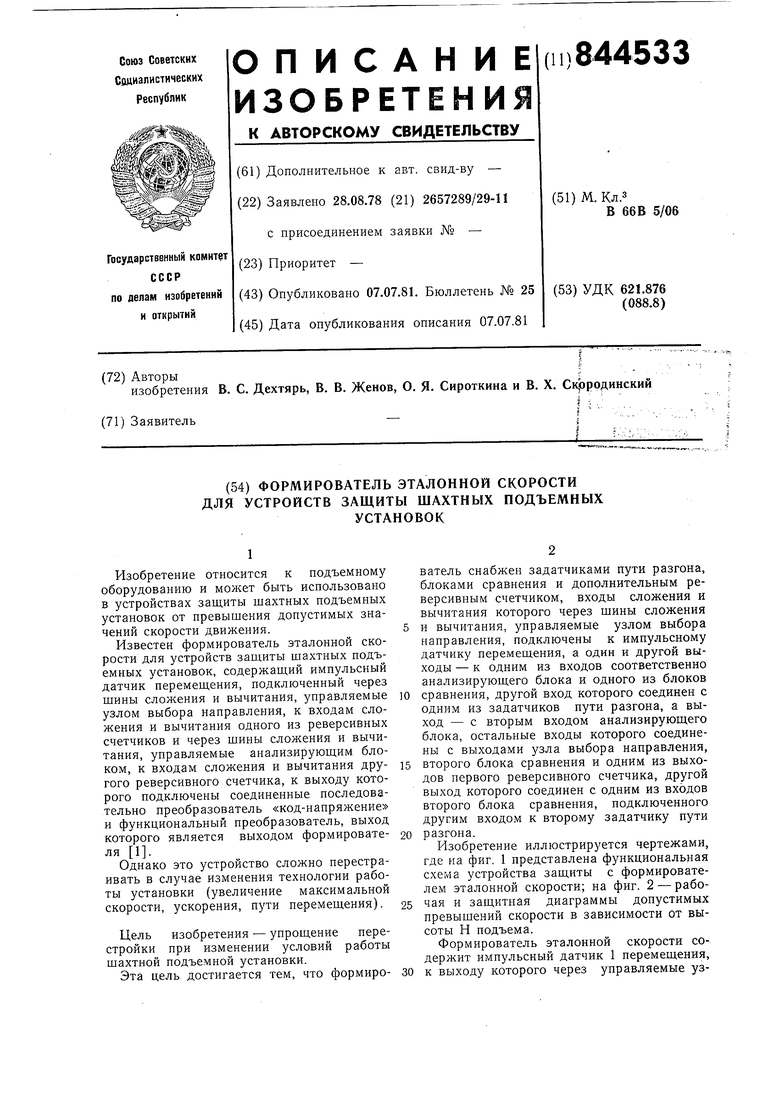
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь эталонной скорости для устройств защиты шахтных подъемных установок | 1982 |
|
SU1158471A2 |
| Устройство для управления режимами работы шахтного подъемника | 1981 |
|
SU1094827A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для контроля работы подъемной машины | 1988 |
|
SU1613421A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для управления скоростными режимами перемоточного станка | 1984 |
|
SU1236037A1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| Стенд для испытания энергоустановок электромобилей | 1985 |
|
SU1255890A1 |
| Устройство управления шахтной подъемной установкой | 1985 |
|
SU1331783A1 |