Изобретение относится к системам управления подъемниками, в частности к автоматизированным и автоматическим системам управления шахтной подъемной установкой (ШПУ), и предназначено для повышения уровня безопасности и эффективности работы подъемной установки.
Известны устройства, предназначенные для контроля движения с защитой от превышения скорости. Одним из них является аппарат защиты и контроля хода подъемной установки типа АЗК-1, в состав которого входят блоки программирования движения и электрический ограничитель скорости (Бежок В.Р., Чайка Б.Н., Кузьменко Н.Ф. и др. Руководство по ревизии, наладке и испытанию шахтных подъемных установок, 2-е изд, перераб. и доп. - М.: Недра. 1982, с.238-249, 356-361).
Электрический ограничитель скорости имеет двухканальное исполнение для контроля целостности цепей и совместно с блоком программирования движения при разъездах на максимальной скорости и блоком программирования движения при разъездах на пониженной скорости составляет узел задания и индикации. АЗК-1 имеет два блока, каждый из которых включает сельсин-датчик положения сосуда, тахогенератор и второй сельсин-датчик ограничителя скорости, который поворачивается на угол 60-70° за путь замедления подъемной машины. Индикаторами положения сосудов являются сельсин-приемники, скорости - стрелочный индикатор. К входам узла задания и индикации подключается шина блока технологической автоматики, по которой поступают дискретные сигналы управления циклом работы подъемной установки, а к выходам - блок управления предохранительным торможением и вход системы автоматического регулирования скорости двигателя подъемной установки. Сигнал задания на предохранительное торможение появляется в момент, когда действительная скорость превысит защитную. Формирование сигнала защитной скорости в период разгона осуществляется преобразованием диодным функциональным преобразователем в параболическую зависимость от положения сосуда сигнала второго сельсин-датчика первого сосуда, а в период замедления - второго сельсин-датчика второго сосуда. В период равномерного хода вход диодного функционального преобразователя переключается на источник стабилизированного переменного напряжения, пропорционального защитной скорости равномерного хода, в период дотягивания - пропорционального защитной скорости дотягивания. Выход диодного функционального преобразователя подключен к входу блока сравнения, на второй вход которого подается сигнал с тахогенератора, приведенный к масштабу первого входа. К выходу блока сравнения подключается вход блока управления предохранительным торможением. Сигнал задания скорости формируется двумя сельсинными командоаппаратами со своими программными дисками и общей зубчатой электромагнитной муфтой. Первый командоаппарат предназначен для программирования разгона и замедления при движении вниз, второй - при движении вверх. При равномерном ходе муфта расцеплена с редуктором, программные диски остановлены.
Недостатком известных устройств является то, что ручная настройка параметров диаграммы скорости движения и защитной скорости рассматриваемых устройств усложняет пусконаладочные работы и не позволяет оптимизировать диаграммы в процессе нормальной работы установки.
Кроме того, износ трущихся частей А3К-1 снижает точность воспроизведения защитной и рабочей диаграммы, что частично компенсируется периодической подрегулировкой, а наличие ненадежных контактных элементов снижает эффективность работы подъемной установки.
Из известных устройств наиболее близким по технической сущности и достигаемому результату и принятым за прототип является устройство защиты и контроля шахтной подъемной установки (Островлянчик В.Ю., Стексов А.М., Дорн Е.А., Конев А.М. Устройство защиты и контроля шахтной подъемной установки, Патент РФ № 2114043)
Устройство защиты и контроля шахтной подъемной установки включает узел задания и индикации, с входами которого соединены первый и второй датчики положения сосудов, датчик скорости, выходная шина блока технологической автоматики, а с выходами - первый и второй индикаторы положения сосудов, индикатор скорости, блок управления предохранительным торможением, блок автоматического регулирования скорости двигателя подъемной установки, узел задания и индикации данного устройства выполнен на программируемом контроллере, содержащем процессорный блок, три блока преобразования входных сигналов в двоичный код, к входам первого и второго которых подключены первый и второй датчики положения сосудов соответственно, к входу третьего - датчик скорости, блок ввода дискретных сигналов, к входу которого подсоединена выходная шина блока технологической автоматики, три блока преобразования двоичных кодов в выходные сигналы, причем к выходам первого и второго присоединены первый и второй индикаторы положения сосудов соответственно, к выходам третьего - индикатор скорости, блок вывода дискретных сигналов, выход которого соединен с входом блока управления предохранительным торможением, блок вывода непрерывных сигналов, к выходу которого подключен вход блока автоматического регулирования скорости двигателя подъемной установки, блок преобразования интерфейсов и блок последовательного ввода-вывода. Воспроизведение защитной и рабочей диаграммы по значениям их параметров, вводимых через блок согласования интерфейсов, обмен технологической информацией с программируемыми контроллерами сети и информационно-управляющей системой технологической сети микроЭВМ обеспечивает автоматическую коррекцию параметров диаграмм без изменения нормального режима работы подъемной установки и совместимость с микропроцессорными автоматическими системами управления, а использование сигналов датчиков, задания скорости в устройстве позволяет проводить расчет требуемой защитной и оптимальной рабочей диаграммы в функции действующих значений координат движения и задания скорости, что повышает эффективность и безопасность подъемной установки.
Недостатками данного устройства являются следующие: использование в качестве устройств индикации глубины и скорости газоразрядных индикаторов, что не позволяет в полной мере получать оператору ШПУ информацию о текущем состоянии шахтной подъемной установки и таким образом не дает полноценного контроля и управления за технологическим процессом "Подъем", отсутствие самоконтроля цепей прохождения исполнительных сигналов, что может привести к аварийной ситуации, формирование диаграммы движения подъемного двигателя только в функции пути, без учета скорости, тока и нагрузки подъемных двигателей, что ограничивает область применения устройства, отсутствие возможности ведения протокола работы установки и хранения информации о состоянии подъемной установки, что ограничивает возможности анализа произошедших аварийных ситуации.
Задача изобретения - повышение уровня безопасности работы подъемной установки, ее надежности и производительности за счет расширения функций управления прототипа и введения возможностей мониторинга технологического процесса, хранения диаграмм работы ШПУ за истекшие периоды времени, обеспечение связи с информационными сетями, а также автоматизации процесса поиска и устранения неисправностей.
Сущность изобретения состоит в том, что в устройство управления, контроля движения и технологических защит шахтной подъемной установки, включающее узел задания и индикации, выполненный на программируемом контроллере, с входами которого соединены первый и второй круговые фотоэлектрические датчики положения сосудов, выходная шина блока технологической автоматики, а с выходами - блок последовательных интерфейсов, блок управления торможением, входы системы управления шахтной подъемной установкой, введены блок самоконтроля, к которому подключены блок электропривода ШПУ и блок системы управления подъемной установкой, датчики тока и напряжения, подключенные к блокам ввода непрерывных сигналов, блок управления движением, к выходам которого подключена система управления подъемной установкой, блок подключения монитора, к которому подключен монитор, блок энергонезависимой памяти и блок связи с информационными сетями.
При этом устройству придаются новые свойства: автоматического обнаружения аварийной ситуации при отказе цепей защит, сигнализации и задания системы регулирования, что достигается введением блока самоконтроля, на входы которого подключены сигналы контролируемых цепей; наглядного отображения состояния шахтной подъемной установки в виде мнемосхемы с отображением скорости и положения подъемных сосудов, тока двигателя, напряжения двигателя, как в текущий момент времени, так и от начала цикла подъема в виде диаграмм, что достигается введением монитора, подключенного к блоку подключения монитора; расширения области применения устройства на все типы подъемных машин, что достигается введением блока управления движением, выходы которого подключаются ко входам системы регулирования подъемной установки; возможности применения устройства в многоуровневых системах управления, что достигается введением блока связи с информационными сетями; возможность ведения файл протокола работы ШПУ и хранения диаграмм работы ШПУ за истекшие периоды времени, что достигается введением блока энергонезависимой памяти.
На чертеже приведена блок-схема, отражающая структуру устройства защиты и контроля шахтной подъемной установки. Устройство включает первый 1 и второй 2 круговые фотоэлектрические датчики положения сосудов, датчик тока 3, датчик напряжения 4, блок 5 технологической автоматики ШПУ, на линиях выходной шины которого формируются сигналы задания цикла работы подъемной установки, блок 6 управления торможением, систему 7 управления шахтной подъемной установкой, электропривод 8 ШПУ, монитор 9 и узел задания и индикации, выполненный на программируемом контроллере, содержащем процессорный блок 10, первый 11 и второй 12 блоки ввода непрерывных сигналов, к которым подключены датчик напряжения 4 и датчик тока 3 соответственно, блок 13 вывода непрерывных сигналов, к которому подключен блок 6 управления торможением, первый 14 и второй 15 счетные блоки, к которым подключены первый 1 и второй 2 круговые фотоэлектрические датчики положения сосудов соответственно, блок 12 вывода дискретных сигналов, к которому подключен блок 7 системы управления подъемной установкой, блок 16 управления движением, к которому подключен блок 7 системы управления подъемной установкой, блок 17 самоконтроля, к которому подключены обратные связи от системы 7 управления подъемной установкой и электропривода 8 ШПУ, блок 18 подключения монитора, к которому подключен монитор 9, блок 19 ввода дискретных сигналов, к которому подключена система технологической автоматики подъема 5, блок 20 последовательных интерфейсов, блок 21 связи с информационными сетями, блок 22 энергонезависимой памяти, двигатель 23 подъемной установки с подключенным на вал с его стороны фотоэлектрическим датчиком положения 1, барабан 24 подъемной установки с тормозной системой с подключенным на вал с его стороны фотоэлектрическим датчиком положения 2, тормозная система которого подключена к блоку 6 управления тормозами.
Устройство работает следующим образом. При включении устройства проверяется, подключен ли блок связи с информационными сетями 21 к информационной сети, если есть соединение с сетью, то устройство запрашивает необходимые параметры, и по сети загружает параметры в оперативную память процессорного блока 10, если устройство работает в автономном режиме, то параметры в оперативную память процессорного блока 10 загружаются из файла параметров, сохраненных в блоке 22 энергонезависимой памяти. В оперативной памяти процессорного блока 10 выделена область текущих параметров защитной и рабочей диаграммы скорости, допустимого переподъема и глубины приемных площадок горизонтов относительно точки точного останова сосудов, основных технологических параметров подъемной установки, таких как ток двигателя, напряжение двигателя, тестовые отзывы на состояния сигналов. В защищаемой области памяти записаны максимально и минимально допустимые контрольные значения параметров защитной и рабочей диаграмм скорости, значения тока растормаживания, тока, при котором сосуд считается груженым, максимальное напряжение двигателя. Текущие параметры рабочей скорости в режимах работы "Автоматика", "Ручной", "Ревизия", "Люди" или "Груз".
В каждом цикле работы программы выполняются следующие операции. Число импульсов круговых фотоэлектрических датчиков 1 и 2 читается с регистров счетных блоков 14 и 15 и преобразуется в двоичные сигналы положения соответствующих сосудов относительно назначенного горизонта, приведенные к масштабу индикации. По изменениям значений круговых фотоэлектрических датчиков 1 и 2 за один цикл выполнения программы рассчитывается действительная скорость движения сосудов. Сигналы с датчиков тока и напряжения 3 и 4, преобразованные в двоичный код блоками ввода непрерывных сигналов 11 и 12 соответственно, читаются в память и приводятся к масштабу преобразования.
Задаваемая скорость и ускорение вычисляются по соотношениям в соответствии с типом и текущими параметрами рабочей диаграммы. Задание скорости записывается в регистр блока 16 управления движением, с выхода которого сигналы подаются на вход системы 7 управления ШПУ. При разгоне ШПУ исходя из положений сосудов, а также значений тока и напряжения двигателя по заданным уравнениям формируется оптимальная диаграмма разгона двигателя ШПУ. Для этого действительное значение скорости программно сравнивается процессорным блоком 10 с заданным значением скорости, и если действительная скорость меньше заданной, то действительное значение тока, полученное с датчика тока 3, и скорости, рассчитанное по приращениям круговых фотоэлектрических датчиков положения 1 и 2, сравниваются с пороговыми значениями тока и скорости, сохраненными в области памяти процессорного блока, если данные значения более пороговых, то разрешается переключение на следующую ступень ускорения. Неисправность работы системы управления разгоном устанавливается следующим образом, если после установления задания на скорость фактическая скорость не достигла 95% заданной в течении 40 секунд, то индицируется авария системы управления, формируется и выдается блоком 13 на блок 6 сигнал о наложении предохранительного тормоза, что приводит к его наложению. Блок 17 самоконтроля принимает сигналы обратной связи о состоянии контактов в цепи управления ШПУ и сравнивает их с тестовыми значениями, имеющими прямую зависимость от выходных сигналов аппарата.
Из двоичных значений аналоговых и дискретных входных сигналов блоком связи с сетями формируется пакет данных, который в конце каждого цикла передается в сеть, блоком 21 связи с информационными сетями, для отображения в вышестоящей системе АСУ, кроме того данный пакет используется блоком 18 подключения монитора для формирования мнемосхемы и диаграмм тока, напряжения, скорости, глубины на панели оператора.
Сброс счетчиков счетных блоков 14 и 15 производится при проходе соответствующим сосудом датчика точного останова, при превышении которого указывается авария переподъема и накладывается предохранительный тормоз.
Защитная скорость представляется параболической зависимостью в функции действительного положения сосуда и вычисляется по известному уравнению защитной диаграммы (Мурзин В.А., Решетников В.И., Шатило В.И. Защита рудничных подъемных установок от превышения скорости, - М.: Недра, 1974. - С.93). При превышении допустимого переподъема или действительной скоростью значения скорости защитной диаграммы блок 13 вывода непрерывных сигналов выдает сигнал на вход блока 6 управления торможением, что приводит к наложению предохранительного тормоза.
Контроль целостности кинематических цепей достигается путем установки первого кругового фотоэлектрического датчика положения сосудов 1 со стороны барабана ШПУ, а второго кругового фотоэлектрического датчика 2 со стороны приводного двигателя, таким образом отсутствие вращения или его неравномерность будут свидетельствовать о том, что повреждены кинематические цепи двигатель-барабан.
По сигналам задания цикла работы подъемной установки ("Вперед", "Назад", "Автоматический режим", "Ревизия", "Ручной режим", "Точки точного останова первого сосуда", "Точка точного останова второго сосуда", "Код горизонта назначения"), установленным на выходной шине блока 5 технологической автоматики и читаемым с регистра блока 19 ввода дискретных сигналов, модифицируется содержимое области памяти текущих параметров, соответствующее глубине приемной площадки горизонта назначения, допустимого переподъема, и инициируются цикл подъема и соответствующий алгоритм.
Устройство может быть выполнено на основе программируемого контроллера Fastwel в составе базового шкафа, включающего процессорный блок (10) CPU188-5МХ, два универсальных блока ввода/вывода UNIO96-5 (14, 15), запрограммированных схемами х32-32 разрядных аппаратных счетчиков импульсов, универсальный блок ввода/вывода UNIO48-5 (17), запрограммированный аппаратной схемой контроля цепей управления и защит; универсальный блок ввода/вывода UNIO48-5, запрограммированный под формирование управляющих сигналов для текущей ШПУ (16); два блока ввода непрерывных сигналов Fastwel AI8S-5A (11, 12), блок вывода непрерывных сигналов Fastwel AO16-V/C (13), блок ввода дискретных сигналов DI32-5 (19), блок вывода дискретных сигналов DO32-5 (16), блок подключения монитора Octagon 5445 (18), блок интерфейсов Fastwel FBC (21), энергонезависимой памяти Disc On Chip DOC 2000 (22), и может содержать два круговых фотоэлектрических датчика положения типа RVI-58 (1 и 2), подключенных один (2) на вал со стороны двигателя (23), другой (1) на вал со стороны барабана подъемной установки (24), блок технологической автоматики 4, входящий в состав схемы управления подъемной машины ЦР 6×3,2/0,75, монитор Advantech FPM-3120TV (9), блок управления торможением (6) типа РДУ-1, блок системы автоматического регулирования скорости двигателя на основе УБСР-АИ типа КТЭ 100/440 922-2Т УХЛ4 (8).
Предлагаемое устройство управления, контроля движения и технологических защит шахтной подъемной установки отличается по сравнению с существующими аналогами следующими преимуществами:
- повышение безопасности ШПУ за счет обеспечения самоконтроля цепей управления и защит;
- формирование диаграммы движения, обеспечивающей более мягкие режимы работы подъемного двигателя;
- расширение области применения аппарата на все типы подъемных машин с приводом любого типа;
- возможность формирования сложных диаграмм предохранительного томожения для обеспечения защиты от набега подъемного сосуда на канат и обрыва каната при резком торможении;
- обеспечение более полного отображения процесса и параметров подъема для машиниста ШПУ, что повышает безопасность работы при работе в ручных и полуавтоматических режимах; наличие энергонезависимой памяти позволяет вести и хранить протокол и диаграммы работы ШПУ, что позволяет белее полно вести анализ работы ШПУ, а в случае аварий и анализировать момент и причины ее происхождения.
Данные преимущества обусловливают повышение уровня безопасности шахтной подъемной установки, а также возможность ее внедрения и использования в полностью автоматических подъемных комплексах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1999 |
|
RU2161118C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
Изобретение относится к системам управления подъемниками, в частности к автоматизированным и автоматическим системам управления шахтной подъемной установкой (ШПУ). Устройство содержит узел задания и индикации, выполненный на программируемом контроллере, с входами которого соединены первый и второй круговые фотоэлектрические датчики положения сосудов, выходная шина блока технологической автоматики, а с выходами - блок последовательных интерфейсов, блок управления торможением, входы системы управления ШПУ. В устройство введены блок самоконтроля, к которому подключены блок электропривода ШПУ и блок системы управления подъемной установкой, датчики тока и напряжения, подключенные к блокам ввода непрерывных сигналов, блок управления движением, к выходам которого подключена система управления подъемной установкой, блок подключения монитора, к которому подключен монитор, блок энергонезависимой памяти и блок связи с информационными сетями. Техническим результатом изобретения является повышение уровня безопасности работы подъемной установки, ее надежности и производительности за счет расширения функций управления. 1 ил.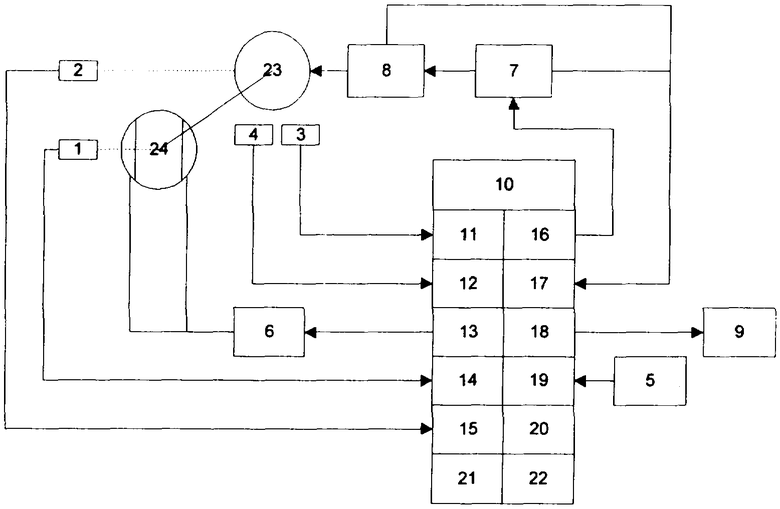
Устройство управления, контроля движения и технологических защит шахтной подъемной установки, включающее узел задания и индикации, выполненный на программируемом контроллере, с входами которого соединены первый и второй круговые фотоэлектрические датчики положения сосудов, выходная шина блока технологической автоматики, а с выходами - блок последовательных интерфейсов, блок управления торможением, входы системы управления шахтной подъемной установкой, отличающееся тем, что в него введены блок самоконтроля, к которому подключены блок электропривода шахтной подъемной установки и блок системы управления подъемной установкой, датчики тока и напряжения, подключенные к блокам ввода непрерывных сигналов, блок управления движением, к выходам которого подключена система управления подъемной установкой, блок подключения монитора, к которому подключен монитор, блок энергонезависимой памяти и блок связи с информационными сетями.
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство регистрации параметров работы шахтной подъемной установки | 1990 |
|
SU1798443A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| УСТРОЙСТВО ДЛЯ ПРОГРАЛи\ИРОВАНИЯ СКОРОСТИ ШАХТИОЙ ПОДЬЕЛ1НОЙ УСТАНОВКИ | 0 |
|
SU288262A1 |

