(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ШАХТНОГО ПОДЪЕМНИКА
I
Изобретение относится к автоматическому регулированию скорости подъемно-транспортных средств и может быть использовано для обеспечения заданной тахограммы движения и контроля превышения заданной скорости.
Известно устройство для регулирования скорости шахтного подъемника 1.
Это устройство не обладает достаточной точностью регулирования.
Наиболее близким к предлагаемому является устройство, содержаш,ее преобразователь скорости враш,ения в напряжение, на выходе которого подключены самописец, блок контроля превышения заданной скорости и индикатор 2.
Недостатком устройства является невысокая чувствительность и точность срабатывания контролируюш,его блока, что не позволяет обеспечить заданную тахограмму движения.
Цель изобретения - повышение точности регулирования скорости шахтного подъемника.
Поставленная цель достигается тем, что в устройстве, содержащем преобразователь скорости вращения в напряжение, самописец, контролирующее устройстбо превышения заданной скорости и индикатор, преобразователь скорости вращения в напряжение выполнен в виде кинематически связанного с исполнительным двигателем дополнительного асинхронного микродвигателя, в роторную цепь которого включен датчик частоты роторного тока, выход которого через следящий преобразователь частоты роторного тока в код соединен с индикатором и входом преобразователя код-напряжение, вы10ход преобразователя соединен с самописцем и входом блока контроля превышения заданной скорости и режимов работы, состоящим из схемы сравнения напряжений, программного блока заданной скорости и блока регулирования скорости вращения,
15 при этом вход блока контроля превышения заданной скорости и режимов работы является первым входом схемы сравнения напряжений, второй вход схемы сравнения напряжений соединен с первым выходом програм20много блока заданной скорости, второй выход которого соединен с первым входом блока регулирования скорости вращения, второй вход блока регулирования скорости вращения соединен со вторым выходом схемы сравнения напряжений, а выход с цепями управления привода подъемника, причем статорные цепи асинхронного микродвигателя подключены к сети через переключатель фаз, управляющий вход которого соединен с задатчиком направления вращения.
Блок регулирования скорости вращения может быть выполнен в виде переключателя тока и подключенных к его выходам амплитудного кодировщика и управляемого вентиля, при этом амплитудный кодировщик выходами связан с аппаратами управления и защиты, а управляемый вентиль выходом включен к цепь обмотки электрорегулятора давления рабочего тормоза.
Роторный ток асинхронного микродвигателя имеет частотную реактивную структуру и значительно в меньщей степени по сравнению с током статора зависит от временных токовых возмущений, а число эталонных импульсов, заполняющих каждый из временных интервалов, равных длительности полупериодов роторного тока, прямо пропорционально скорости. Действительная скорость вращения определяется как разность числа импульсов, заполняющих полупериоды роторного тока при наличии вращения и его отсутствии.
Путем сравнения действительной скорости вращения, определяемой с высокой точностью, и заданной скорости относительно пути и режимов работы обеспечивается оптимальное автоматическое регулирование скорости вращения и заданная тахограмма движения.
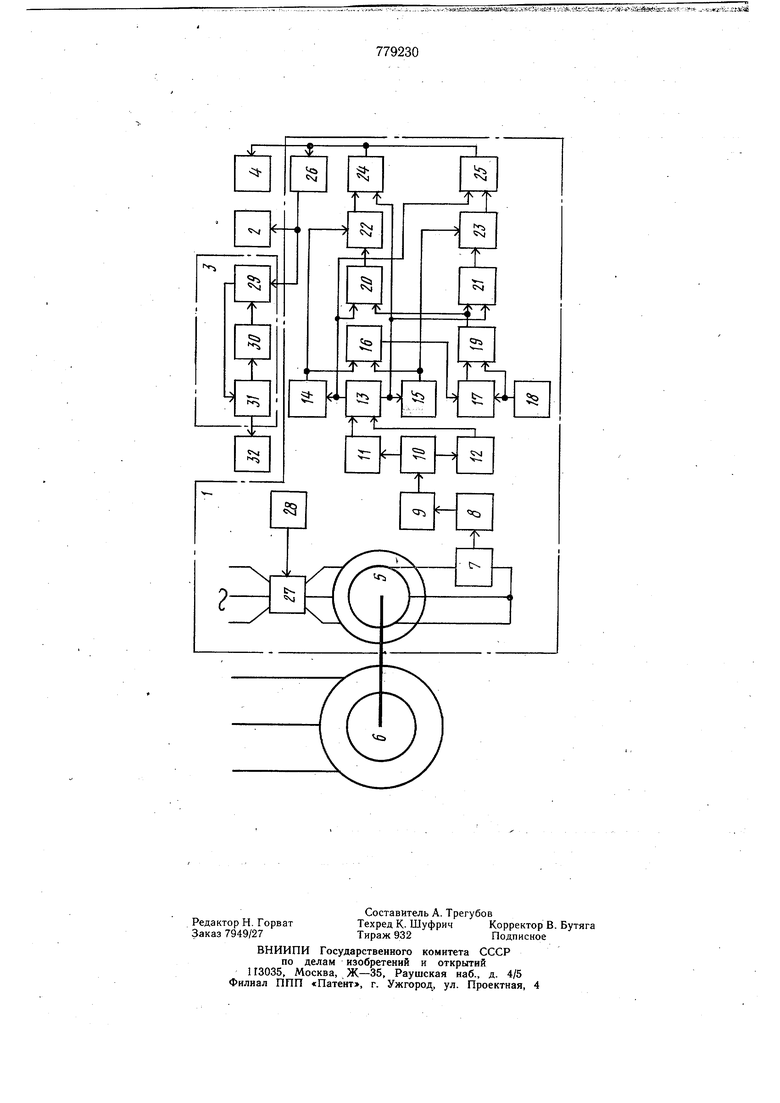
На чертеже представлена блок-схема устройства.
Устройство для регулирования скорости щахтного подъемника содержит преобразователь 1 скорости вращения в напряжение, самописец 2, блок 3 контроля превыщения заданной скорости и режимов работы, индикатор 4.
Преобразователь 1 скорости вращения в напряжение выполнен в виде асинхронного микродвигателя 5, кинематически связанного с исполнительным двигателем подъемника 6.
В роторную цепь асинхронного микродвигателя 5 включен датчик частоты роторного тока, состоящий из щунта роторной цепи 7, выпрямительного моста 8, усилителя-ограничителя 9, триггера Шмитта 10, диодно-емкостного ключа 11 переднего фронта импульса, диодно-емкостного ключа 12 заднего фронта импульса.
Датчик частоты роторного тока выходами диодно-емкостных ключей 11 и 12 переднего и заднего фронтов импульса соединен со следящим преобразователем частоты роторкого тока в кбД/вьгаолненного в виде триггера- 13 управления, , подключенных к его выходам дифференцирующих цепей 14 и 15, логического элемента ИЛИ 16, счетчика 17, генератора эталонных импульсов 18,
двухвходовых ключей 19, 20 и 21, счетчиков 22 и 23, ключевых коммутаторов 24 и 25, преобразователя 26 код-напряжение.
Статорная цепь.асинхронного микродвигателя 5 питается током через переключатель 27 фаз, соединенный с задатчиком 28 направления вращения.
Самописец 2 подключен к выходу преобразователя 26 код-напряжение.
Контролирующее устройство превыщения заданной скорости 3 состоит из схемы
29 сравнения напряжений, подключенной первым входом к выходу преобразователя 26 код-напряжение, программного блок,а 30 заданной скорости и режимов работы, связанного с указателем глубины (на чертеже не показано) и блока 31 регулирования скорости вращения,подключенного к цепям управления привода,подъемника 32. Программный блок 30 заданной скорости и режимов работы выходами соединен со вторым входом схемы 29 сравнения напряжений и перQ вым входом блока 31 регулирования скорости вращения, второй входкоторого подключен к выходу схемы 29 сравнения напряжений.
Индикатор 4 подключен к выходу следящего преобразователя частоты роторного
тока в код.
Устройство работает следующим образом.
В момент включения исполнительного двигателя 6 от блок-контакта реверса (на чертеже не показано) включается и самоблокйруется (до нового включения исполнительного двигателя 6) задатчик 28 направления вращения, который управляет срабатыванием переключателя 27 фаз. Последовательность подключения статорных фаз к источJ. нику тока, обеспечивает одностороннее вращение роторов асинхронного микродвигателя 5 и исполнительного двигателя 6. При этом на щунте роторной цепи 7 датчика частоты роторного тока возникает переменное напряжение с частотой, определяемой скоростью вращения ротора асинхронного микродвигателя 5, которое затем преобразуется в односторонние импульсы выпрямительным мостом 8, усиливается и ограничивается по амплитуде усилителем-ограничителем 9, формируется в прямоугольные импульсы с короткими межимпульсными паузами триггером Шмитта 10, преобразуется в дельта-импульсы с помощью диодно-емкостного ключа 11 переднего фронта импульса и диодно-емкостного ключа 12 заднего фронта импульса,
Эти импульсы поступают на вход следящего преобразователя частоты роторного тока в код.
На входе следящего преобразователя часJ тоты роторного тока в код установлен триггер 13 управления. От импульса с диодноемкостного ключа 11 переднего фронта импульса срабатывает триггер 13 управления, который первым выходом через дифференцирующую цепь 14 и логический элемент ИЛИ 16 выдает сбросовый импульс на счетчик 17, и устанавливает его в исходное состояние. Одновременно с первого выхода триггера 13 управления напряжение поступает на двухвходовой ключ 20, открывая его, и на ключевой коммутатор 25, давая ему разрешение на передачу информации со счетчика 23 к преобразователю код-напряжение 26 и к индикатору 4. Выход дифференцирующей цепи 14 импульсом воздействует на сбросовый вход счетчика 22, приводя его в исходнзе состояние. С этого момента счетчик 17 начинает заполняться импульсами, поступающими от генергатора 18 эталонных импульсов, число заполняющих импульсов счетчика 17 пропорционально произведению FT, где F - частота генератора эталонных импульсов 18, Т - интервал полупериода роторного тока асинхронного микродвигателя 5 при отсутствии вращения ротора. В это время с выхода счетчика 17 выдается запрещение на первый вход двухвходового ключа 19, подготавливая начало отсчета фактической разности полупериодов роторного тока асинхронного микродвигателя 5, определяемых при вращении и отсутствии вращения ротора. После заполнения счетчика 17 эталонными импульсами, он дает разрешение на первый вход двухвходового ключа 19, через который, а также через ранее открытый двухвходовой ключ 20, эталонные импульсы уходят в счетчик 22 и накапливаются в нем до тех пор, пока импульс с диодно-емкостного ключа заднего фронта импульса 12 не переключит триггер 13 управления в новое состояние, при котором с его второго выхода поступит разрешение на открывание ключевого коммутатора 24. При этом код счетчцка 22 через ключевой коммутатор 24 поступает на преобразователь 26 код-напряжение и на индикатор 4. Код счетчика 22 сохранится на весь следующий интервал полупериода роторного тока асинхронного микродвигателя 5 и на это время сохранится выходное напряжение преобразователя 26 код-напряжение и показания индикатора 4. Импульс со второго выхода триггера 13 управления через дифференцирующую цепь 15 приведет в исходное состояние счетчик 23 и через логический элемент ИЛИ 16 - счетчик 17, дает разрешение на открывание двухвходового ключа 21. При этом снова начинается заполнение- счетчика 17 эталочными импульсами, который, подготовив начало отсчета фактической разности полупериодов роторного тока, выдает разрешение на открывание ключа 19. После чего эталонные импульсы от генератора 18 эталонных импульсов уходят в счетчик 28 и накапливаются в нем до тех пор, пока новое переключение триггера 18 управления не выдаст разрешение на ключевой коммутатор 25 и не приведет в исходное состояние счетчики 17 и 22. На весь интервал следующего полупериода роторного тока, счетчик 23 окажется подключенным через ключевой коммутатор 25 к индикатору 4 и к преобразователю 26 код-напряжение, обеспечивающим индикацию скорости и преобразование кода в пропорциональное напряжение. Поочередно счетчики 22 и 23 заполняются импульсами, число которых равно равности числа импульсов, определяемых .при наличии скорости вращения и при нулевой скорости, и через ключевые коммутаторы 24 и 25 соединяется с индикатором 4 скорости и преобразователем 26 код-напряжение. Самописец 2, включенный на выходе преобразователя 26 код-напряжение, регистрирует напряжение в функции скорости вращения. Выходное напряжение преобразователя 26 код-напряжение поступает на вход схе-. мы 29 сравнения напряжений контролирующего устройства превышения заданной скорости 3. Поскольку цикл подъема состоит из трех основных периодов: разгона, равномерного хода, замедления,- для обеспечения заданной скорости и тахограммы движения период разгона дополнительно разбивается на два периода (период движения сосуда в разгрузочных кривых 1,0 м/сек, и период разгона, когда скорость движения возрастает до максимального значения), период замедления дополнительно разбивается на три периода (период замедления, в течение которого скорость движения уменьшается от максимального значения до скорости, безопасной для соприкосновения подъемного сосуда с разгрузочными кривыми, период «дотягивания движения с малой скоростью, в течение которого обеспечивается подход к месту стопорения с малой безопасной скоростью, период стопорения, когда производится остановка сосуда и окончательное наложение рабочего тормоза В период движения сосуда в разгрузочных кривых пуск двигателя осуществляется в функции тока, а программный блок 30 заданной скорости и режимов работы относительно пути переводит переключатель тока блока 31 регулирования скорости в положение, при котором сигнал с выхода схемы 29 сравнения напряжений поступает на управляемый вентиль, который в свою очередь изменяет (увеличивает или же уменьшает) пропорционально напряжению входа величину тока через обмотку электрорегулятора давления рабочего тормоза. Рабочий тормоз в этот период осуществляет оптимальный тормозной момент. После того, как скорость движения сосуда достигает 1 м/сек и сосуд выходит из разгрузочных кривых, программный блок 30 заданной скорости и режимов работы переводит переключатель тока в новое положение, при котором выходное напряжение схемы 29 сравнения напряжений поступает на амплитудный кодирювщик и, в зависимости от амплитуды напряжения на входе, амплитудный кодировщик посылает сигналы на аппараты управления, осуществляющие дальнейший разгон сосуда до максимальной скорости.
После достижения сосудом максимальной скорости начинается период равномерного хода. В этот период программный блок 30 заданной скорости и режимов работы устанавливает переключатель тока в положение, при котором снова напряжение с выхода схемы 29 сравнения напряжений поступает на управляемый вентиль. И если скорость движения превосходит заданную, управляемый вентиль путем регулирования тока через обмотку электрорегулятора давления рабочего тормоза осуществляет оптимальное подтормаживание привода, и тем самым поддерживает заданную скорость движения.
В период замедления, когда скорость движения должна уменьшаться от максимального значения до скорости, безопасной для соприкосновения подъемного сосуда с разгрузочными кривыми, программный блок 30 заданной скорости и режимов работы в самом начале периода переводит Переключатель тока в положение, при котором сигнал от схемы29 сравнения напряжений поступает на амплитудный кодировщик, выходы которого подключены на те же аппараты управления, осуществляющие в этот период замедление сосуда.
После чего начинается период «дотягивания, при котором исполнительный двигатель 6 снова включается в функции тока, а программный блок 30 заданной скорости и режимов работы через переключатель тока блока 31 регулирования скорости подает напряжение с выхода схемы 29 сравнения напряжений на управляемый вентиль. В этот период осуществляется оптимальное подтормаживание привода подъемника рабочим тор.мозом.
В конце пути привод окончательно затормаживается рабочим тормозом, с исполнительного двигателя снимается напряжение. Подъемник подготовлен к новому циклу работы.
В этом случае, когда аппараты управления и рабочий тормоз не отрабатывают по каким-либо причинам заданную скорость и она возрастает, амплитудный кодировщик
или же управляемый вентиль включают аппараты защиты и привод затормаживается предохранительным тормозом, равнозначно - в случае исчезновения напряжения схемы скоростомера или же возникновения
в ней неисправностей.
Высокая чувствительность и точность измерения скорости, обеспечение заданной тахограммы движения устройством повышают безопасность работы и производительность подъемника.
Формула изобретения
Устройство для регулирования скорости шахтного подъемника, содержащее преобразователь скорости вращения в напряжение, самописец, блок контроля превышения заданной скорости и индикатор, отличающееся тем, что, с целью повышения точности регулирования скорости, преобразователь скорости вращения в напряжение выполнен в виде кинематически связанного с исполнительным двигателем дополнительного асинхронного микродвигателя, в роторную цепь которого включен датчик частоты, выход которого через следящий преобразователь частоты роторного тока в код соединен.с индикатором и входом преобразователя коднапряжение, выход преобразователя соединен с самописцем и входом блока контроля превышения заданной скорости состоящим
д из схемы сравнения напряжения, программного блока заданной скорости и режимов работы и блока регулирования скорости вращения, при этом второй вход схемы сравнения напряжения соединен с первым выходом программного блока заданной скоS рости, второй выход которого соединен с первым входом блока регулирования скорости вращения, второй вход блока регулирования скорости вращения соединен со вторым выходом схемы сравнения напряжений, а выход с цепями управления привода подъемника, причем статорные цепи асинхронного микродвигателя подключены к сети через переключатель фаз, управляющий вход которого соединен с задатчиком направления вращения.
JИсточники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 622737, кл. В 66 В 1/24, 1978.
2.Завозив Л. Ф. Шахтные подъемные установки. М., «Недра, 1975, с. 229-231.
779230

| название | год | авторы | номер документа |
|---|---|---|---|
| Скоростемер подъемника | 1979 |
|
SU872421A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для частотного управления асинхронным двигателем с фазным ротором | 1977 |
|
SU743152A1 |
| Цифровой регулятор угловой скорости дугостаторного асинхронного двигателя | 1984 |
|
SU1203481A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Цифровой регулятор скоростиАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU849137A1 |