Изобретение относится к подъемному оборудованию и может быть использовано в устройствах защиты гаахтных . подъемных установок от превьппения допустимых значений скорости движения.
Цель изобретения - повьппение надежности.
На чертеже представлена функциональная схема устройства.
Аормирователь содержит импульсный датчик 1 перемещения, к выходу кртр- рого через управляемые узлом 2 выбора направления перемещения шины 3-6 сложения и вьгаитания подключены входы сложения и вычитания (счетные входы ) реверсивного счетчика 7 (счетчик пути Вперед и реверсивного счетчика 8 (счетчик пути Назад), а через управляемые анализирующим блоком 9 гаины 10 и 11 - входы реверсивного счетчика 12. С выходов узла 2 на шины 3-6 счетчиков 7 и 8 поступают команды Вперед, Назад соответственно.
Выходы счетчиков 7 и 8 подключены яа вход блоков 13 и 14 сравнения на равенство, выходы которых вместе с выходами счетчиков 7 и 8 и выходом узла 2 выбора направления перёмещения соединены с входами анализирующего блока 9.
К выходу счетчика 12 подключена цепь из последовательно соединенных преобразователя 15 код - напряжение, функционального преобразователя 16 (вьтолнен на операционномусилителе аналогового сумматора 17 с блоком 8 ограничения в обратной связи (на операционном усилителе). Уровень ограничения определяется величиной заданной скорости движения и управляется от задатчика 19 скорости. Выход аналогового сумматора 17 подключен в схемах ограничителей скорости к блоку 20 сравнения, второй вход которого соединен с выходом датчика 21 скорости
Формирователь эталошюй скорости работает следующим образом.
В случае, когда необходимо осуществить перемещение подъемного сосуда в направлении Вперед (подъем груза с нижнего горизонта на верхний)сначала подъем осуществляют в режиме работы с максимально допустимой скоростью, а затем в режиме работы со скоростью, меньшей максимально допустимой. При наличии команды на движение Вперед (подъемный сосуд находится на датчике точной остановки нижнего горизонта счетчик 7 обнуляется, а в счетчик 8 заносится число, равное в масштабе путевьпс импульсов расстоянию между крайними точками ствола; Командой Вперед с выхода узла 2 выбора направления разрешено прохояодение импульсов от импульсного датчика. 1 перемещения по шине 3 к входу сложения счетчика 7, а по шине 6 - к входу вь1читания счетчика 8. За счет этого счетчик 7 подготовлен к сложению, а счетчик 8 к вьтитанию поступивших импульсов. При отработке режима Назад картина будет обратная.
Такая схема включения счетчиков позволяет в текущий момент времени иметь два результата отработки заданного перемещения. При движении Вперед на счетчике 7 фиксируется пройденное расстояние, на счётчике 8 оставшееся.
Показания счетчиков: 7 и 8 анализируются с помощью блоков 13 и 14 сравнения на равенство, на вторые входы которых .поступает в цифровом коде величина, равная расстоянию, необходимому для разгона подъемного сосуда до -максимальной скорости. При равенстве кодов на выходах блоков 13 и 14 сравнения вырабатьшак)тся сигналы, которые поступают на входы блока- 9, выполненного, например,.на базе автомата Мзфа.
Анализирзпощий блок 9 в соответствии с собственным алгоритмом и значениями сигналов на входах вырабатывает на своих выходах сигналы, указывающие на нахождение.подъемного сосуда в той или иной зоне ствола
Блок 9 вырабатьшает также команды Сложить и Вычесть, являющиеся результатом отработки системы Булевых функций входных сигналов, получаемые на соответствующих выходах блока 9.
Указанные команды поступает на шииы 0 и 11, которые соединяют входы сложения или вычитания реверсивного счетчика 1 2 с импульсным датчиком 1 перемещения.
При пуске машины с нижнего горизонта в направлении Вперед счетчик 7 обнулен и с его выхода поступает сигнал на вход блока 9, который вырабатьшает сигналы на соответствующизс выходах, разрешающие прохождение импульса с датчика 1 по шине 10 на вход сложения счетчика 12, который будет осуществлять операцию сложения поступающкй импульсов, т.е. фиксировать пройденное подъемным сосудом расстояние в период разгона. Емкость счетчика 12 выбирается равной перемещению сосуда при разгоне до максимальной скорости. Информация в цифровом виде на выходах счетчика 12с помощью преобразователя 15 код-напря жение преобразуется в аналоговую фор му и подается на вход функционального преобразователя 16, реалйзирующего:защитную диаграмму скорости в функции пути для режима работы с мак симально допустимой скоростью перемещения, С выхода преобразователя 16 сигнал подается на вход аналогового сумматора 17, в обратную связь которого включен блок 18, ограничение ко торого в режиме работы с максимально допустимой скоростью равно kyino, т.е. напряжение на вьжоде суммйтора 17 повторяет входное. Напряжение с выхода сумматора 17 поступает на вход блока 20, на второй вход которого подается сигнал с датчика 21 скорости.При превьшении относительно допустимой скорости блок 20 вырабатьюает сигнал аварийной ситуации для последующей отработ ки системой автоматического управле.ния приводом подъемной машины. Как указьшалось вьппе, на один из входов блоков 13 и 14 сравнения на равенство поступает в цифровом коде число, равное расстоянию, необходимому для разгона подъемного сосуда до максимальной скорости. На другие входы этих блоков поступают показания счетчиков 7 и 8. 8 момент равенства показаний счетчика 7 с указанным числом на выходе блока 13 выработан сигналf с приходом которого блок 9 формирует на соответствующем вьосоде сигнал, означающий, что подъемный сосуд перешел в зону равномерного движения. При этом прекр ащается подача сигнала, разрешаю щего сйожение счетчиком 12 импульсов перемещения, поступающих на вход шины 10, Когда показания счетчика 8, фиксирующего оставшееся расстоя:ние, станут равными числу на блоке 14, последний сфо| мирует сигнал, с приходом которого блок 9 выработает сигнал на другом выходе, свидетельствующий о переходе сосуда в зону замедления вблизи верхнего горизонта, и соответственно сигнал на третьем выходе, разрешающий прохождение по шнне П сигналов с импульсного датчика 1 на вход вычитания счетчика 12. Число на его выходе по мере приближения К верхнему горизонту будет уменьшаться. Соответственно будут снижаться его аналоговое значение.на выходе преобразователя 15 код - напряжение и величина напряжения на выходе преобразователя 16, поступающего на вход сумматора 17, на выходе которого будет снижаться величина допустимой скорости. С приходом сосуда на датчик точной остановки верхнего горизонта счетчик 8 обнуляется и генерирует сигнал в блок 9, а в счетчике 7 фиксируется число, равное расстоянию между крайними горт1зонтами. Таким образом уст™ ройство готово к последующему перемещению между горизонтами в направлении Назад. При этом счетчик 8 фиксирует пройденное расстояние, а счетчик 7 - оставтееся. В режиме работы со скоростью пер®- мещения, меньшей максимально допус тимой, формирователь pa6oTaet как к в режиме работы с максимально допустимой скоростью ( отличия только, в работе сумматора 17). С выхода эадатчика 1 9 поступает сигнал, определяющий уровень ограничения скорости для данного режима работы (в отличие от режима работы с 1ксимально допустимой скоростью, когда зФовень ограничения равен нул). ри перемещении подъемного Ьосуда s аправлении Вперед по мере разгона апряжение на входе сумматора 17j потупающее с выхода преобразователя 16,. возрастает, а выходное напрязке ие повторяет входное только до вел5Г ины, определяемой узлом ограничекмк« альнейшее увеличение входного напряжения не приводит к возрастаН1ао выходного. При переходе подъемного сосуда в зону торможения наттряжеияе на выходе преобразователя 16 умень- шается, а на выходе сумматора 17 я® ляется неизменным до момента време- ни, пока его входное напряженке не
51158471,
станет меньше величины, опредеяяе-повторяя входное. Таким образом фор
мой блоком 18, и только после этогомируют защитную диаграмму для данвыходное напряжение уменьшается,ного режима работы.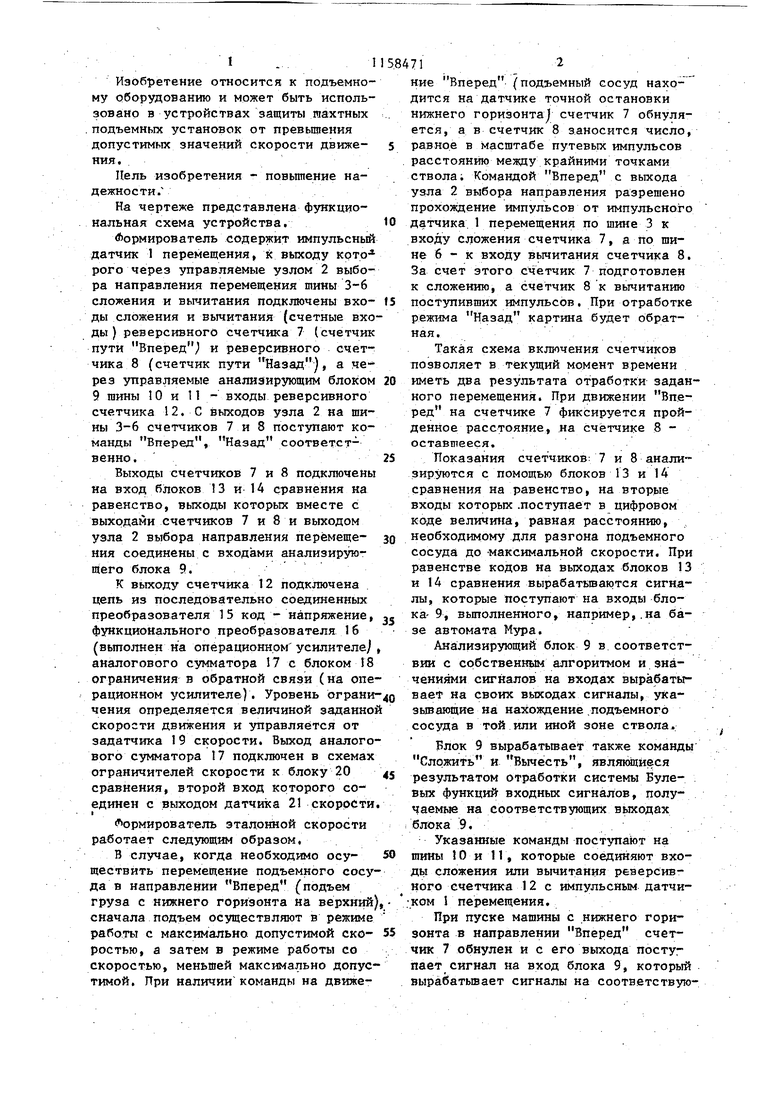
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь эталонной скоростидля уСТРОйСТВ зАщиТы шАХТНыХпОд'ЕМНыХ уСТАНОВОК | 1978 |
|
SU844533A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для управления режимами работы шахтного подъемника | 1981 |
|
SU1094827A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, КОНТРОЛЯ ДВИЖЕНИЯ И ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 2005 |
|
RU2314990C2 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU933594A1 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
ФОРМИРОВАТЕЛЬ ЭТАЛОННОЙ ;СКОРОСТИ ДЛЯ УСТРОЙСТВ ЗАЩИТЫ ШАХТJHBIX ПОДЪЕМНЫХ УСТАНОВОК по авт. св.Я 844533 отличаю-, щ и и с я тем, что, с целью повьшения надежности в работе, он снабжен аналоговым сумматором, блоком ограничения и задатчиком режима скоросг ти, причем один вход аналогового сумматора подключен к выходу функционального преобразователя, а другой вход - к выходу блока ограничения, один из входов которого подключен к выходу аналогового сумматора, подключенного к одному из входов блока сравнения, а другие входы 6noka ограничения подключены к выходам эадатчика режима скорости. СП 00 1 
| Формирователь эталонной скоростидля уСТРОйСТВ зАщиТы шАХТНыХпОд'ЕМНыХ уСТАНОВОК | 1978 |
|
SU844533A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
