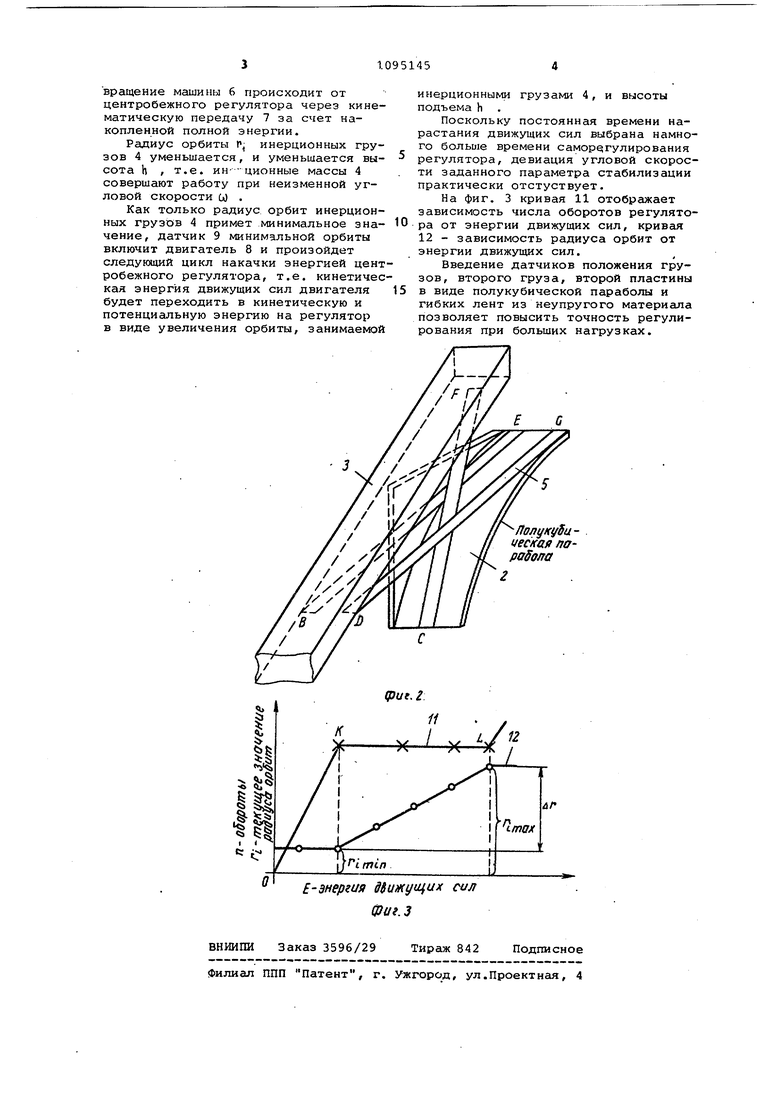
Изобретение относится к центробе ным регуляторам скорости и может быть использовано для автоматическо го регулирования скорости ведущего звена машин и приборов. Известен центробежный регулятор скорости, содержащий вал вращения, выполненный с прорезями, в которых с возможностью перемещения расположены коромысла с инерционными масса ми, а коромысла установлены в средней части на штифте и соединены под вижно шатунами с двумя плавающими оппозитными валами, на одном из которых установлен балластный груз l Недостатком регулятора является невысокая точность регулирования пр больших нагрузках. Наиболее близким по технической сущности к изобретению является цен робежный регулятор скорости, содерж вши вал, связанный с двигателем, первый груз, закрепленный на конце тяги, первую .пластину,изогнутую в виде полукубической параболы, один конец которой прикреплен к валу непосредственно, а другой - через жёсткую связь и блок управления дви гателем 2 Недостатком регулятора является дебаланс относительно оси вала за счет одного инерционного груза и невозможности передачи махового момента на ведущее звено из-за наличия гибкой тяги. Цель изобретения - повышение точ ности регулятора. Поставленная цель достигается тем, что в центробежный регулятор скорости, содержащий вал, связанный с двигателем, первый груз, закрепле ный на конце тяги, первую пластину, изогнутую в виде полукубической пар болы, один конец которой прикреплен к валу -непосредственно, а другой через жесткую связь и блок управления двигателем, введены датчики поло Кения грузов, связанные с блоком управления двигателем, второй груз, закрепленный на второй тяге, вторая пластина,изогнутая в виде полукубической параболы и закрепленная на валу симметрично относительно первой и гибкие ленты из неупругого матери ла, причем тяги выполнены в виде жестких стержней, а гибкие ленты из неупругого материала прикреплены крест-накрест одними концами к жест ким ртержням, а другими концами к пластинам.; На фиг. 1 схематически представлен центробежный регулятор и его схема привязки к машине и двигателю где ,н - радиус минимальной орбиты MoiKi радиус максимальной орбиты, иг - величина изменения радиуса орбит инерционных масс, В , С , D ,Е F , G - точки крепления гибких нерастяжимых лент, Н - направление вращения вала, Ь - высота; на фиг. 2 представлена схема крепления гибких нерастяжимых лент (жесткие стержни и пластины условно оттянуты) ; на фиг.3 кривые зависимости оборотов и радиуса Г( орбит от энергии Е движущих, ся силJ на фиг. 4 - силы, действующие на инерционные грузы. Центробежный регулятор скорости содержит вал 1 вращения, на котором установлены пластины 2,отогнутые в разные стороны в виде полукубической параболы, жесткие стержни 3 с инерционными грузами 4 и гибкие ленты 5 из неупругого материала, присоединенные с предварительным натяжением крест-накрест в точках 3 , F ,D к жестким стержням 3, а в точках Е , С , Q - к отогнутым частям пластин 2 . Точки В ,F,D иЕ ,С ,G образуют силовые треугольники,препятствующие смещению ;хестких стержней 3 относительно отогнутой части пластин 2. Если разводить грузы 4, то жесткие стержни 3 благодаря наличию .лент 5 окатывают, профили отогнутых частей пластин 2,при этом грузы 4 перемещаются в пространстве по параболическим кривым, что удовлетворяет шестой теореме Гюйгенса. На фиг. 1 изображены также машина 6, кинематическая передача 7 двигателя 8, датчики 9 положения грузов, блок10 управления двигателем 8. I . Центробежный регулятор скорости работает следующим образом. При подаче на устройство электрического тока датчик 9 минимальной орбиты включает двигатель 8, который начинает вращать через кинематическую передачу 7 регулятор по стрелке Н с плавно нарастающими оборотами (участок .О-К кривой 11 на фиг. 3. Одновременно вращается и машина 6. По достижении угловой скорости заданного параметра стабилизации инерционные грузы 4 начинают расходиться. Начало расхождения грузов 4 соответствует минимальному радиусу орбиты г, . Дальнейшее увеличение центробежной силы и момента количества движения от действия движущих сил двигателя происходит за счет увеличения радиуса ь, , а не за счет увеличения угловой скорости со . По достижении инерционнылет грузами 4 максимальной орбиты наступает верхний предел стабилизации оборотов точки L (см. кривые 11 и 12j , а датчик 9 положения максимальной орбиты тключает двигатель 8. Дальнейшее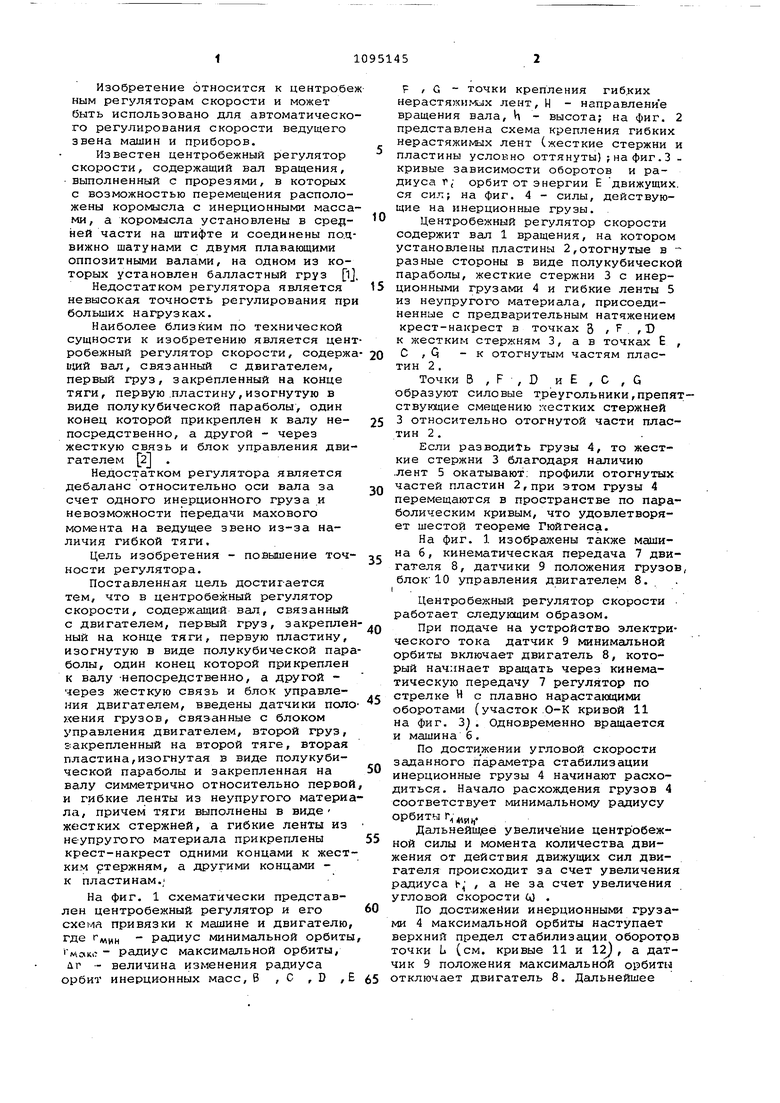
ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР СКОРОСТИ, содержащий вал, связанный с двигателем, первый груз, закрепленный на конце тяги, первую пластину, , изогнутую в виде полукубической- параболы, один конец которой прикреплен к валу, непосредственно, а другойВГГ ОЮЗН Я 13. ::J3 .через жесткую связь и блок управления двигателем, отличающийс я тем, что, с целью повышения точности регулятора, в него введены датчики положения грузов, связанные с блоком управления двигателем, второй груз, закрепленный на второй тяге, вторая пластина, изогнутая в виде полукубикеской параболы и закрепленная на валу симметрично относительно первой, и гибкие ленты из неупругого материала, причем тяги выполнены в виде жестких стержней, а гибкие ленты из неупругого материала прикреплены чрест-накрест одними концами к жестким стержням, а други- f. ми концами - к пластинам. , .53 (Л X) 1п 4 СП
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рассказы о физиках и математиках | |||
| М., 1981, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
