Изобретение относится к машиностроению, а именно к регуляторам скорости вращения, и может быть использовано для стабилизации числа оборотов ведущего вала машин и приборов . Цель изобретения - повьшение точ ности стабилизации скорости враще. ния ведущего вала. На чертеже показано схематично устройство центробежного регулятора скорости вращения. Регулятор содержит вал 1, устано ленный с возможностью вращения в подшипниках 2 и 3 и соединенный через коническую передачу 4 с двигате лем 5 и машиной 6. На валу 1 жестко закреплена направляющая рамка 7, на которой по обе стороны от оси враще ния размещены два одинаковых груза 8и 9, сферической или цилиндрической формы с возможностью свободного скольжения на ней радиально в подшипниках 10 и 11. Грузы 8 и 9 связа ны с валом 1 посредством цилиндриче ких пружин 12 и 13 растяжения, выполненных с межвитковым натяжением (навивка с подкруткой). Каждая из пружин одним концом закреплена на вашу 1,а другим (удлиненным) концом входит в центральное отверстие груза, где закрепляется винтом 14. На противоположных концах грузов 8 9вставлены небольшие постоянные ма ниты 15 и 16. Б зоне действия этих магнитов на различных расстояниях о вала 1 неподвижно установлены датчи ки 17 положения грузов. Все датчики подключены к блоку 18 управления двигателем 5. Регулятор работает следующим образом. Сигналом от блока 18 управления включается двигатель 5, который через коническую передачу 4 приводит во вращение центробежный регулятор машину 6, Вначале угловая скорость постепенно нарастает но при достиженйи величины W -Jее рост пре 1 Ш кращается (Ьо- угловая скорость вра щения; К - жесткость пружины; m масса груза). С этого момента, если производство механической знергии в, двигат/вле 5 продолжает превьшгать ее расход в машине б, весь избыток начинает накапливаться в регуляторе в виде потенциальной энергии пружин 90 и кинетической энергии грузов, которые постепенно переходят на более удаленные от оси вращения орбиты, сохраняя тем самым постоянство угловой скорости. Если расход энергии в машине 6 начинает превьш1ать ее производство в двигателе 5, то происходят аналогичные процессы, но в обратном порядке с отдачей регулятором знергии в нагрузку также при постояянной угловой скорости. Таким образом, если не допускать выхода орбиты вращающихся грузов за то постоянпределы интервала ство угловой скорости ведущего вала обеспечено. Эту функцию выполняют датчики 17 положения, по сигналам от которых блок 18 управления удерживает грузы регулятора около середины указанного интервала рабочих орбит, изменяя мощность двигателя 5. При меньшей точности стабилизации можно ограничиться двумя датчиками положения, когда блок управления работает в режиме Включен-выключен. Настройка регулятора осуществляется перемещением грузов по прямолинейным участкам пружин до совпадения угловых скоростей в начале и в конце рабочего интервала радиусов орбит Дг. После этого данный регулятор ведет себя как гармонический осциллятор с острым резонансом при частоте - вращения : э W -V --- Если после настройки собственная частота -V регулятора оказалась отличной от заданной, то ее можно корректировать только одинаковым изменением массы грузов (например, спиливанием). Наличие у центробежного регулятора острых резонансных свойств позволяет использовать его ив качестве ре-гулятора хода приборов времени, в ом числен переносных (например,будиьниках) .В этом случае нет необходимоси в датчиках положения и пультах управления, но предъявляются повьшенные требования к точности изготовления регулятора и к применяемым в нем материалам. Предпочтительными материалами для изготовления пружин должны быть термостабильныё сплавы (наприер, инвар). Рамка 7 и подшипники 10 и 11 должны составлять пары с наименьшим коэффициентом трения (например, рамка из стали, а подшипники из рубиновых камней).
При горизонтальном положении оси вращения под действием силы тяжести возникают и колебательные движения
Р грузов с амплитудой --, где Р - вес
i груза; К - жесткость пружины. Поэтому рабочий участок направляющей рамки не может быть меньше, чем 2 --- ,
т.е.
К
Г2- Г|
-2
Формула изобретения
Центробежный регулятор скорости вращения, содержащий вал, связанный с двигателем, соединенным с блоком управления, который соединен с датчиками положения, и инерционные грузн, связанные с валом цилиндрическими
пружинами растяжения, о т л к ч а ющ и и с я тем, что, с целью.повышения точности, инерционные грузы установлены на направляющих, жестко закрет1ленных на валу перпендикулярно его оси, а цилиндрические пружины растяжения имеют межвитковое натяжение, удовлетворяющее условию
Г Р
М К г
« - .
2 К
А
р где М - сила межвиткового натяжения; К - коэффициент жесткости пружин;
г - минимальный радиус орбиты вращения центров масс грузов;г - максимальный радиус орбиты
вращения центров масс грузов; Р - вес груза,
при этом на грузах установлены магниты, а датчики положенуу установлены неподвижно на различных расстояниях от вала в зоне воздействия магнита при перемещении грузов.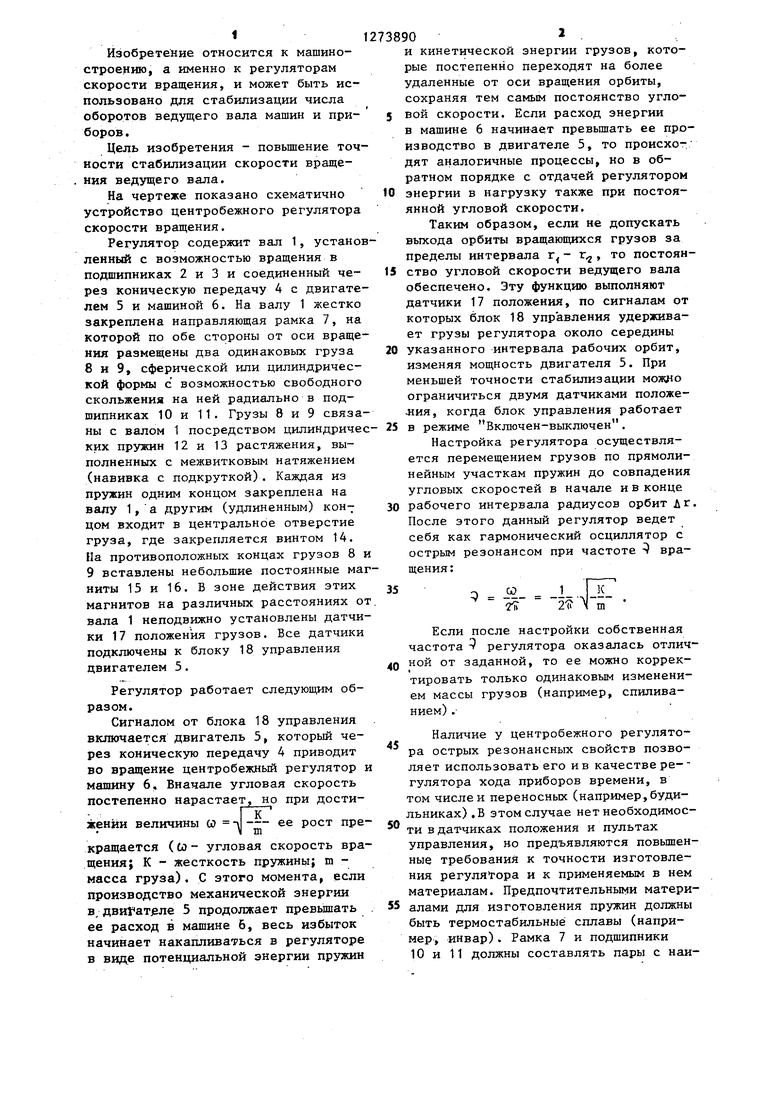
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
| Центробежный регулятор скорости | 1979 |
|
SU962878A1 |
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| Центробежный регулятор скорости вала | 1984 |
|
SU1170436A1 |
| Центробежный регулятор скорости | 1979 |
|
SU842734A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЯГИ СТАЦИОНАРНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2022 |
|
RU2786669C1 |
| Устройство для стабилизации частоты вращения забойного двигателя | 1977 |
|
SU734383A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| ЭКСЦЕНТРОИДНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА И СПОСОБЫ ЕЕ ИСПОЛЬЗОВАНИЯ | 2009 |
|
RU2394338C1 |
Изобретение относится к регуляторам скорости вращения и может быть использовано для стабилизации числа оборотов валов. Цель изобретения повьшение точности регулирования. которая достигается тем, что инерционные грузы, установлены с возможностью радиального перемещения на направляющих, жестко закрепленных на валу вращения, связаны с валом цилиндрическими пружинами растяжения с межвитковым.натяжением, параметры которых удовлетворяют условию М КГ,; , где М - сила межвиткового натяжения пружины; К - коэ Н1Ициент жесткости пружины; г, - минимальный радиус орбиты вращения центров масс грузов; г максимальный радиус орбиты вращения ш центров масс грузов; Р - вес гру- . за. 1 ил. с/) с
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Изохронный конический маятник | 1982 |
|
SU1059539A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
