Изобретение относится к центробежным регуляторам скорости и может быть использовано для автоматического регулирования скорости ведущего звена машин и приборов.
Целью изобретения является повышение точности регулирования.
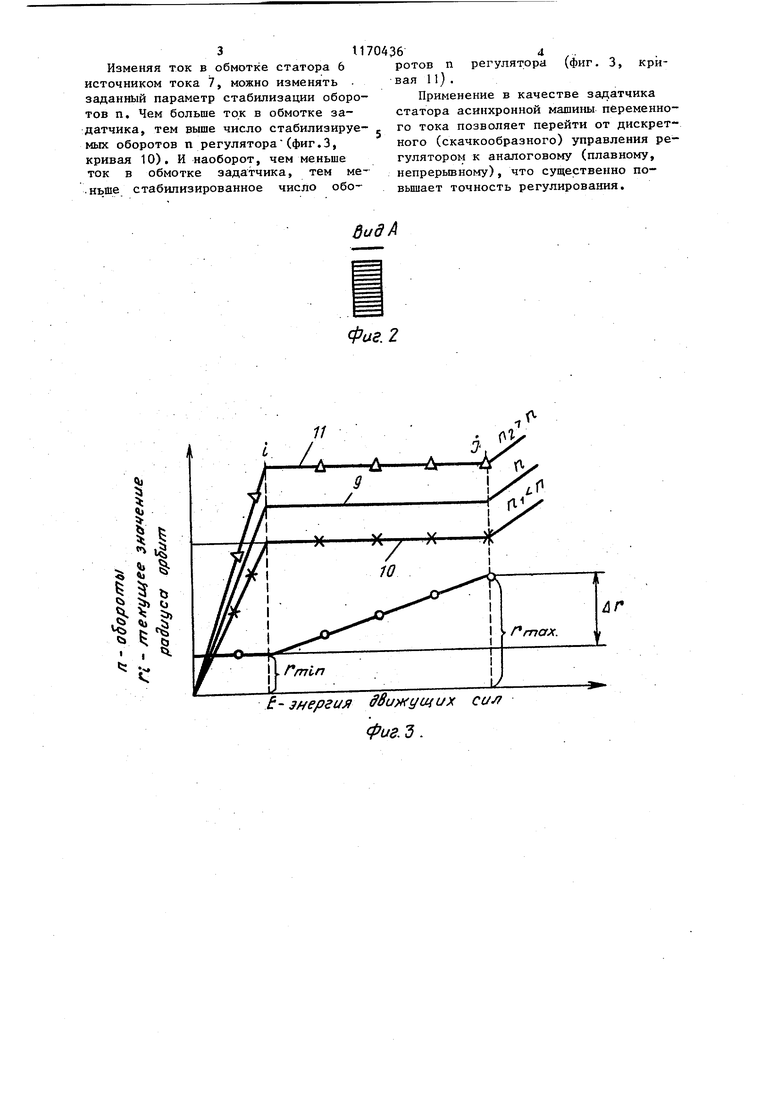
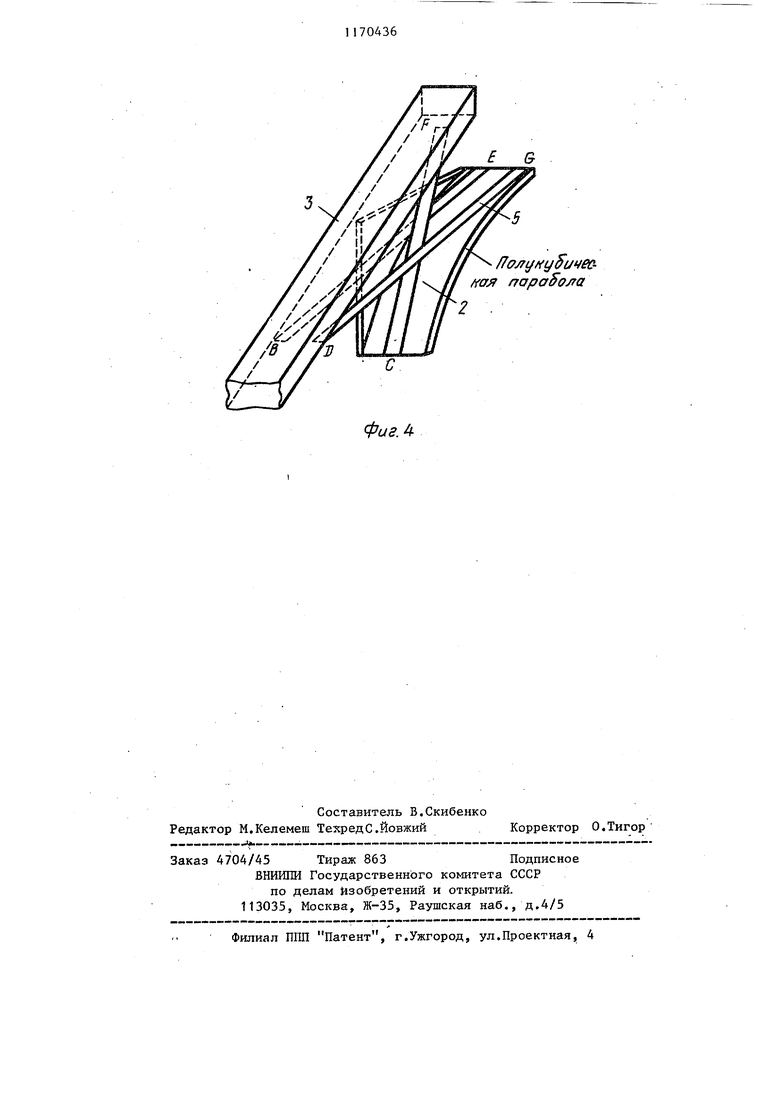
На фиг.1 схематически представлен центробежный регулятор, , где тс, радиус минимальной орбиты, г. радиус максимальной орбиты, sr -величина изменения радиуса орбит инерционных масс, Н - направление вращения вала, h - высотаj на фиг.2 вид А на фиг.1-, на - кривые за висимости оборотов h и значения радиуса г- орбит от энергии Е двшкущих сил при разных значениях тока в обмотках статора на фиг,4 - схема крепления гибких нерастяжимых лент (жесткие стержни и пластины условно оттянуты. В,С, D, Е, F, G- точки крепления гибких нерастяжимых лент).
Центробежный регулятор скорости содержит вал 1 вращения, на котором установлены пластины 2, отогнутые в разные стороны в виде полукубических парабол, жесткие стержни 3 с инерционными грузами 4 и гибкие ленты из неупругого материала 5, соединенные с предварительным натяжением крест накрест в точках Е, С, G к отогнутым
частям пластин 2,
Точки B,F,D и E,C,G образуют силовые треугольники, препятствующие смещению жестких стержней 3 относительно отогнутой части пластин 2. .
Обмотки (не показаны) статора 6 асинхронной машины соединены с источником 7 переменного тока. На валу 1 также установлен ограничитель 8 хода стержней 3, выполненный в виде диска который предотвращает смыкание инерциоуных грузов 4 со статором.
Между инерционными грузами 4 и статором 6 должен быть гарантированный зазор 0,5-1 мм. Это требование необходимо, чтобы в начальный момент пуска регулятор вращался без трения.
Для исключения потерь на вихревые токи инертдионные грузы 4 должны быть выполнены из магнитомягкого материала как это делается в сердечниках трансформаторов переменного тока.
Центробежный регулятор работает следующим образом.
При подаче электрического тока на обмотки статора 6 вокруг него образуется вращающееся магнитное поле, которые увлекает за собой инерционные грузы 4, и происходит выбег регулятора на участок стабилизации (фиг.З, точка i, кривая 9).
Вместе с центробежным.регулятором вращается и машина (не показана), которая связана кинематически с валом 1.
По мере расхождения инерционных грузов 4 на регуляторе накапливается энергия, но с расхождением масс уве-;личивается расстояние между ними и статором б, что приводит к уменьшению воздействия вращающегося магнитногополя на. инерционные грузы, т.е. увеличивается проскальзывание инерционных грузов относительно вращающегося магнитного поля,
Стабилизация скорости заключается .в следующем.
Если момент количества двилсения L, запасенный на регуляторе, падает до какого-то значения L за счет совердюнной работы, то заданная угловая скорость и) снижается до значения (j)j, что моментально приводит к уменьшенгпо центробежной силы, вследствие чего возвращающая сила, воздействуя на инерционные грузы 4, сводит их, т.е. радиус г, орбиты уменьшается, что означает увеличение угловой скорости , до заданной to .
Таким образом, по мере убывания момента количества движения радиус г, орбит вращения инерционных грузов соответственно тожеубывает.
Но убывание радиуса г орбит инерционных грузов приводит к уменьшению зазора между ними и статором 6, что приводит к уменьшению проскальзывани ротора - центробежного регуляторам относительно вращающегося магнитного поля. .
Это означает, что регулятор начинает получать дополнительную энергию на вращение от статора 6, т.е. происходит процесс, аналогичный описанному, только в обратном направле1ши по цепочкеJ увеличение момента количества движения приводит к увеличению угловой скорости, что значит увеличение центробежной силы, которая разводит инерционные грузы, увеличивая радиус орбит, а увеличение радиуса приводит отклонившуюся угловую скорость к заданной. Изменяя ток в обмотке статора 6 источником тока 7, можно изменять . заданный параметр стабилизации оборотов п. Чем больше ток в обмотке задатчика, тем выше число стабилизируемых оборотов п регулятора (фиг.3, кривая 10). И наоборот, чем меньше ток в обмотке задатчика, тем меньше стабилизированное число обо11
бидА 6 регулятора (фиг, 3, криротов п вал 11). Применение в качестве задатчика статора асинхронной машины переменного тока позволяет перейти от дискрет кого (скачкообразного) управления регулятором к аналоговому (плавному, непрерывному), что существенно повьш1ает точность регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
| Центробежный регулятор скорости | 1979 |
|
SU962878A1 |
| Центробежный регулятор скорости вала | 1982 |
|
SU1104476A1 |
| Центробежный регулятор скорости вращения | 1985 |
|
SU1273890A1 |
| Центробежный регулятор скорости | 1979 |
|
SU842734A1 |
| ЭЛЕКТРОДВИЖИТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ЛИНЕЙНУЮ ТЯГОВУЮ СИЛУ | 2007 |
|
RU2374742C2 |
| ЭКСЦЕНТРОИДНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА И СПОСОБЫ ЕЕ ИСПОЛЬЗОВАНИЯ | 2009 |
|
RU2394338C1 |
| Центробежный регулятор скорости | 1978 |
|
SU763861A1 |
| СПОСОБ СЛАБОВИБРАЦИОННОГО СЛУЧАЙНОГО СМЕЩЕНИЯ ГРУЗОВ | 2013 |
|
RU2541579C2 |
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР СКОРОСТИ ВАНА, содержащий закрепленные на валу симметрично расположенные две пластины с рабочей поверхностью в.виде полукубической параболы. которые посредством гибких лент из неупругого материала связаны с двумя тягами в виде жестких стержней, на концах которых закреплены грузы, отличающийся тем, что, с целью повьшения точности регулирования, в цего введены источник переменного тока, ограничитель хода стержней, который жестко закреплен на валу, и установленный с зазором на валу задатчик скорости в виде статора асинхронной машины, который электрически соединен с источником тока, при этом грузы выполнены из магнитомягкого материала. VЛараболи .ЛТП ж uemovtfUffff 7-я nepfmeHffoea
Фиг. 2
I
I
ч,
III
t
1фигЛ
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| G 0i D 13/10, 1982 | |||
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
