Изобретение относится к точной механике и может найти применение в приборостроении и станкостроении в составе винтового механизма прецизионных устройств (координатографы, станки с ЧПУ, микроскопы).
Известна гайка ходового винта, преимущественно для прецизионного координатографа, содержащая корпус, два ролика, взаимодействующие с. профилем резьбы ходового винта, смещенные относительно друг друга на половину шага винта, установленные на цилиндрических оправках-, смонтированных в корпусе и связанных друг с другом устройством для прижатия роликов к винту, выполненным в виде скобы с заведенным в нее кулачком, прижимаемым к пружине (упругая связь) регулировочным винтом, ввернутым в тело скобы. Упругая связь выполнена в виде П-образной пластины 1.
Недостатком известной гайки является погрешность передачи, равная разности между половиной шага ходового винта и расстоянием между плоскостями симметрии роликов, измеренным по оси винта. Это обусловлено тем, что практически один из роликов контактирует с профилем резьбы винта двумя точками, а другой - одной точкой, что при случайном изменении силовых факторов может вызвать дополнительное перемещение гайки и послужить причиной нарушения плавности в работе.
Цель изобретения - повышение точности и плавности передачи.
Указанная цель достигается тем, что в гайке ходового винта, преимущественно для прецизионного координатографа, содержащей корпус, два ролика, взаимодействующие с профилем резьбы ходового винта/ смещенные относительно друг друга на половину шага винта, установленные на цилиндрических оправках, смонтированных в корпусе и связанных друг с другом устройством для прижатия роликов к винту, включающим упругую связь, устройство для прижатия роликов к винту выполнено в виде двух Г-образных качающихся рычагор, каждый из которых имеет цилиндрический выступ в срэгдней части, взаимодействующий с оправкой, а упругая связь - в виде винтовой растяжения, соединяющей концы рычагов.
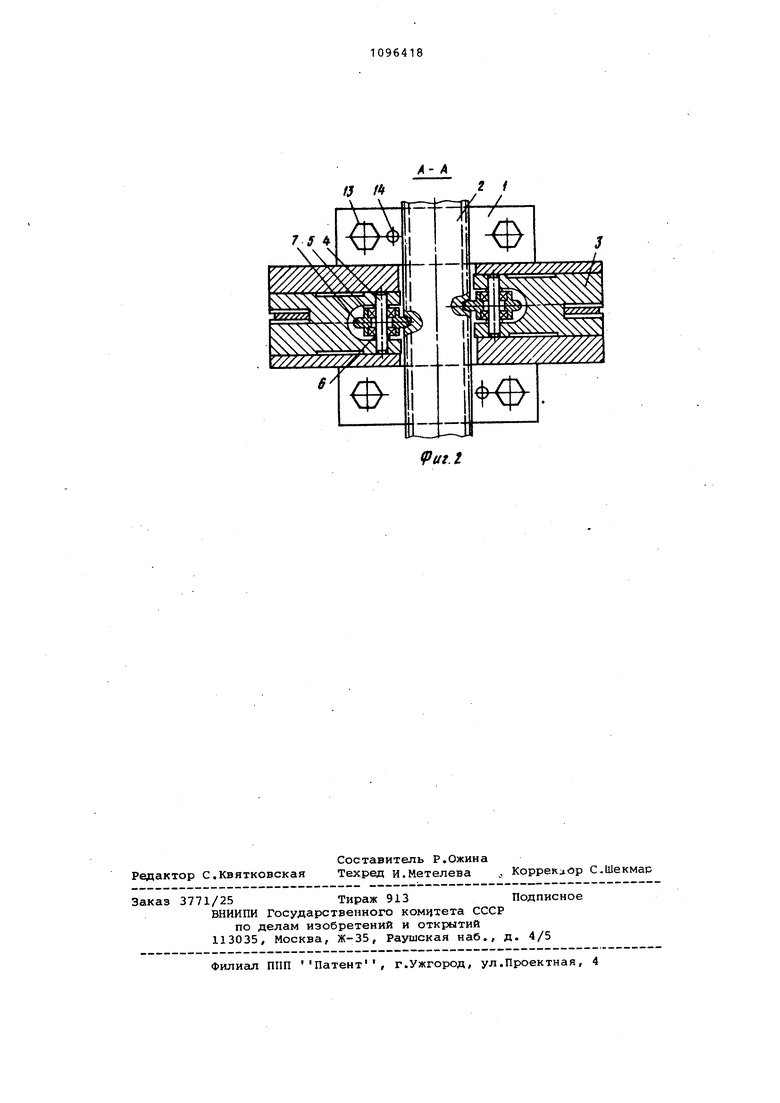
На фиг, 1 изображена гайка ходового винта, продольный разрез; на фиг, 2 - разрез А-А на фиг, 1.
Гайка ходового винта содержит корпус 1, имеющий два отверстия, оси которых пересекают ось ходового бинта 2 и перпендикулярны ей, В калодом
отверстии смонтирована с возможность перемещения цилиндрическая оправка 3 , на которой с помощью оси 4, шарикоподшипников 5 и распорных шайб 6 установлен ролик 7, рабочая поверхность которого является частью тороидйльной поверхности.
Подгонкой толщины шайб Q при изготовлении добиваются устранения осевого зазора в роликах и расстояния между плоскостями симметрии роликов по оси винта, равного половине шага винта. На наружном торце оправки 3 выполнен паз, на цилиндрической поверхности - канавки для смазки.
& пазах корпуса 1 с помощью осей 8 установлены два качающихся Г-образных рычага 9, содержащих в средней части (на уровне осей оправок 3) цилиндрический выступ, взаимодействующий с оправкой 3, Рычаги установлеН17 таким образом, что расстояние между осями рычагов больше расстояния между осями цилиндров выступов ().
Концы рычагов 9 связаны винтовой прухшной 10 растяжения. Регулирование натяжения пружины осуществляется гайкой 11, Гайка крепится к столу 12 (станка) винтами 13 и штифтами 14.
Гайка ходового винта работает , следующим образом.
При вращении ходового винта 2 ролики 7, контактируя с профилем резьбы под воздействием пружины 10, вращаются вокруг осей 4 и перемещают гайку вместе со столом 12 по направляющим. Благодаря возможности оправок 3 перемещаться в осевом направлении конструкция гайки обеспечивает плавную передачу при некоторой непараллельности оси винта 2 направляющим стола 12,
Количество точек контакта каждоЗго ролика с профилем резьбы винта сохраняется в связи с тем, что при выбранном соотношении размеров (L) механизм, состоящий из рычагов 9 и оправок 3, находится в состоянии устойчивого равновесия, соответствующего минимальному значению потенциальной энергии прулшны 10, изменение положения оправок в осевом направлении в любую сторону от номинального положений увеличивает расстояние между ко{1цами рычагов 9, а значит увеличивает потенциальную энергию пружины. 10, которая возвращает систему в равновесное состояние.
Гайка ходового винта, преимущественно для прецизионного координатографа, обладает повышенной точностью и плавностью в работе.
f} /«
J
иг.г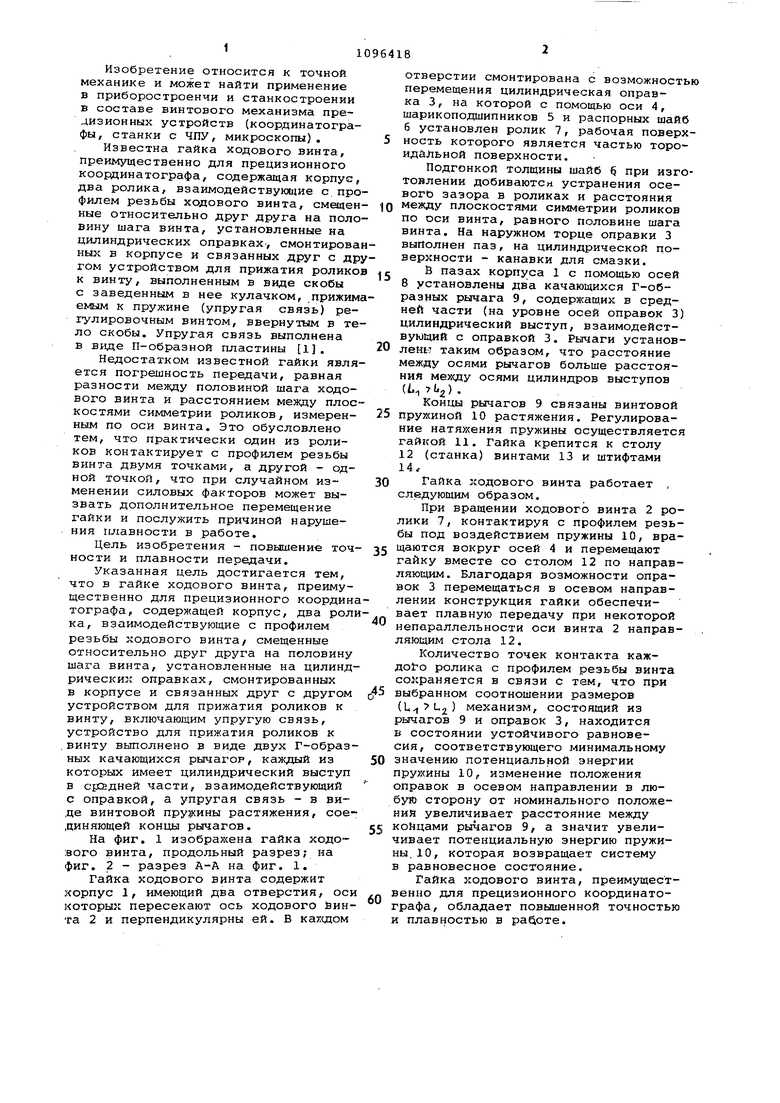
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЙКА ХОДОВОГО ВИНТА | 1971 |
|
SU318762A1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| Механизм линейного перемещения | 1989 |
|
SU1774103A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК ФОРМЫ СТАКАН | 2015 |
|
RU2595182C1 |
| Полуавтомат для изготовления многотраверсных цилиндрических сеток типа "беличьего колеса | 1973 |
|
SU720566A1 |
| Установка для изготовления витого магнитопровода электрической машины | 1989 |
|
SU1690098A2 |
| Устройство для изготовления полировальных кругов | 1983 |
|
SU1135627A1 |
| Устройство для изготовления полых изделий методом намотки длинномерного материала | 1984 |
|
SU1368188A1 |
| РОЛИКОВАЯ ВИНТОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2318147C1 |
| МЕХАТРОННЫЙ МОДУЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2351817C1 |
ГАЙКА ХОДОВОГО ВИНТА, преи мущественно для прецизионного координатографа, содержащая корпус два ролика, взаимодействующие с про филем резьбы ходового винта, смещенные относительно друг друга на половину шага винта, установленные на цилиндрических оправках, смонтированных в корпусе и связанных друг с другом устройством дл,яприжатия роликов к винту, включающим упругую связь, отличающаяся тем, что, с целью повышения точности и плавности передачи, устройство для прижатия роликов к винту выполнено в виде двух Г-обраэных качающихся . рычагов, каждый из КОТОЕЖЛХ имеет цилиндрический выступ в средней части, взаимодействующий с оправкой , а упругая связь - в виде винтовой пружины растяжения, соединяющей рычагов. f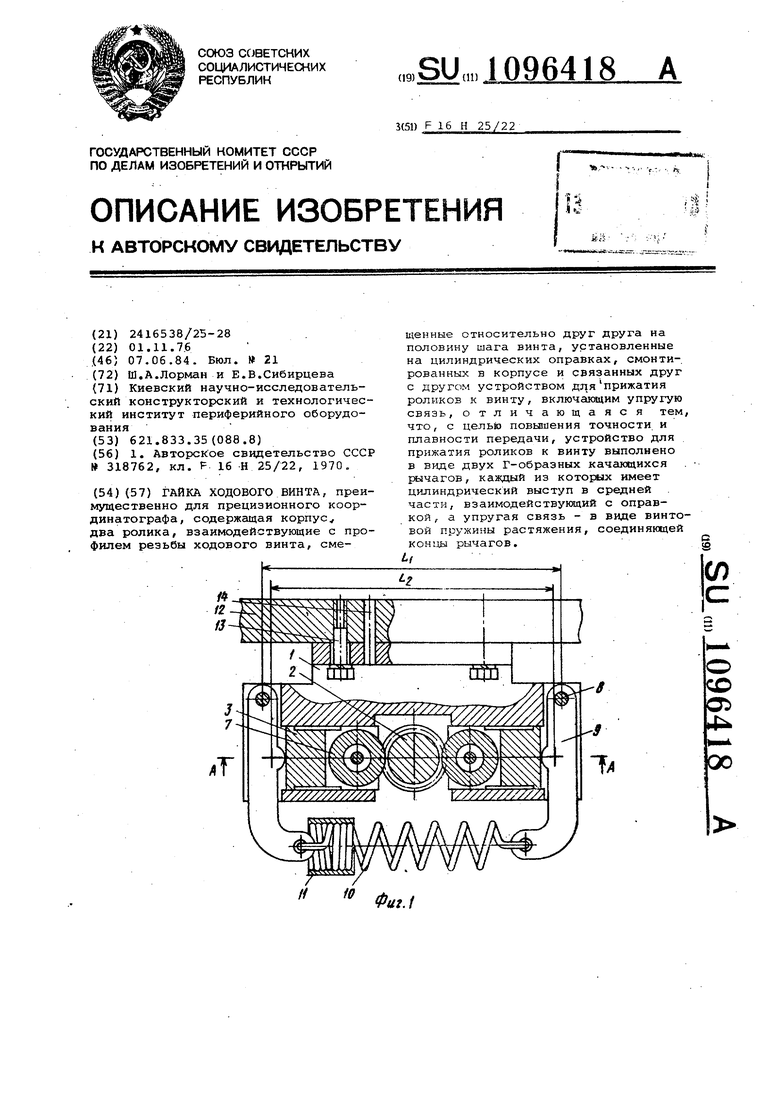
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ГАЙКА ХОДОВОГО ВИНТА | 0 |
|
SU318762A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
