Изобретение относится к радиолокации и может быть использовано в устройствах селекции движущихся целей для подавления пассивных помех с неизвестной частотой и шириной спектра.
Известно устройство компенсации пассивных помех, содержащее два канала, каждый из которых содержит блок задержки, перемножители, сумматоры и блок усреднения, в котором осуществляется попарная компенсация доплеровского сдвига фазы между двумя смежными периодами [1].
Однако известное устройство обеспечивает низкую точность компенсации доплеровского сдвига фазы помехи.
Наиболее близким по технической сущности является устройство адаптивной режекции пассивных помех, содержащее два канала, каждый из которых состоит из режекторного фильтра и последовательно соединенных первого перемножителя и сумматора, другой вход которого соединен с выходом второго перемножителя, последовательно соединенные измеритель коэффициента корреляции и вычислитель весовых коэффициентов, подключенный к управляющим входам режекторных фильтров обоих каналов, а также измеритель междупериодного сдвига фазы [2].
Недостаток известного устройства адаптивной режекции пассивных помех состоит в снижении точности селекции движущихся целей на фоне пассивных помех с неизвестными и неоднородными по дальности доплеровской частотой и шириной спектра.
Цель изобретения - повышение точности селекции движущихся целей на фоне пассивных помех.
Поставленная цель достигается тем, что в устройство адаптивной режекции пассивных помех, содержащее два канала, каждый из которых состоит из режекторного фильтра и последовательно соединенных первого перемножителя и сумматора, другой вход которого соединен с выходом второго перемножителя, последовательно соединенные измеритель коэффициента корреляции и вычислитель весовых коэффициентов, подключенный к управляющим входам режекторных фильтров обоих каналов, а также измеритель междупериодного сдвига фазы, введены последовательно соединенные вычислитель доплеровского сдвига фазы и косинусно-синусный преобразователь, первый и второй выходы которого соединены с объединенными входами первых и вторых перемножителей обоих каналов соотвественно, а в каждый канал - первый и второй блоки задержки, входы которых соединены с входом канала и одним из входов измерителя коэффициента корреляции, причем выходы первых блоков задержки обоих каналов соединены с другими входами измерителя коэффициента корреляции, выход второго блока задержки соединен с объединенными входами первого перемножителя одного канала и второго перемножителя другого канала, при этом входы и выход измерителя междупериодного сдвига фаз соединены соответственно с другими выходами измерителя коэффициента корреляции и входом вычислителя доплеровского сдвига фазы, а выход сумматора каждого канала соединен с входом режекторного фильтра; при этом режекторный фильтр содержит последовательно соединенные первый блок задержки, первый сумматор, другой вход которого соединен с входом первого блока задержки, второй блок задержки, перемножитель, другой вход которого является входом управления, второй сумматор, другой вход которого соединен с выходом первого сумматора, и третий сумматор, причем между выходом второго блока задержки и другим входом третьего сумматора включен третий блок задержки; вычислитель весовых коэффициентов содержит последовательно соединенные первый и второй квадраторы, сумматор, другой вход которого через перемножитель соединен с входом первого квадратора, первый блок добавления единицы, делитель, а между входом первого квадратора и другим входом делителя включен второй блок добавления единицы; измеритель междупериодного сдвига фазы содержит последовательно соединенные делитель, блок вычисления арктангенса, вычислитель модуля, вычитатель числа π, блок присвоения знака, другой вход которого соединен с входом делителя, первый ключ и сумматор, причем между выходом блока вычисления арктангенса и другим входом сумматора включен второй ключ, а управляющие входы делителя, первого и второго ключей подключены к другому входу измерителя междупериодного сдвига фазы; вычислитель доплеровского сдвига содержит последовательно соединенные первый сумматор, вычитатель числа 2π, первый ключ и второй сумматор, выход которого соединен с другим входом первого сумматора через блок задержки, причем между выходом первого сумматора, к которому также подключен парафазный компаратор, и другим входом второго сумматора включен второй ключ, а управляющие входы первого и второго ключей подключены соответственно к прямому и инверсному входам парафазного компаратора.
На фиг. 1 приведена структурная электрическая схема устройства адаптивной режекции пассивных помех; на фиг. 2 - структурная схема измерителя коэффициента корреляции; на фиг. 3 - структурная схема вычислителя весовых коэффициентов; на фиг. 4 - структурная схема измерителя междупериодного сдвига фазы; на фиг. 5 - структурная схема вычислителя доплеровского сдвига фазы.
Устройство адаптивной режекции пассивных помех содержит измеритель 1 коэффициента корреляции, вычислитель 2 весовых коэффициентов, измеритель 3 междупериодного сдвига фазы, два канала 4 и 5, каждый из которых содержит первый перемножитель 6, сумматор 7, второй перемножитель 8, режекторный фильтр 9, первый и второй блоки 10 и 11 задержки, вычислитель 12 доплеровского сдвига фазы и косинусно-синусный преобразователь 13. Режекторный фильтр 9 состоит из первого блока 14 задержки, первого сумматора 15, второго и третьего блоков 16 и 17 задержки, второго сумматора 18, перемножителя 19 и третьего сумматора 20.
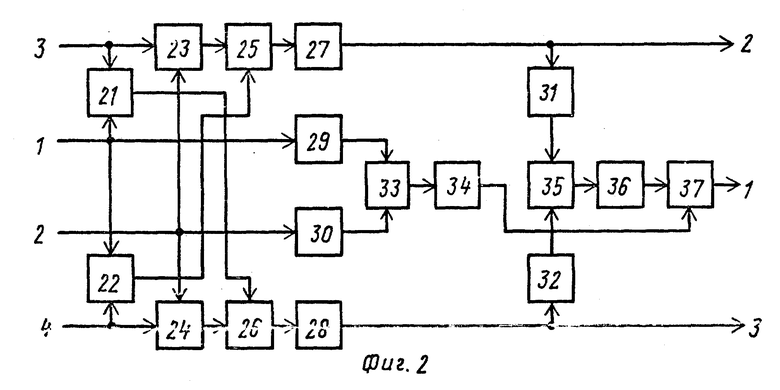
Измеритель 1 коэффициента корреляции (фиг. 2) состоит из первого, второго, третьего и четвертого перемножителей 21, 22, 23 и 24, первого и второго сумматоров 25 и 26, первого и второго блоков усреднения 27 и 28, первого, второго, третьего и четвертого квадраторов 29, 30, 31 и 32, третьего сумматора 33, третьего блока 34 усреднения, четвертого сумматора 35, блока 36 извлечения квадратного корня и делителя 37. Вычислитель 2 весовых коэффициентов (фиг. 3) состоит из первого и второго квадраторов 38 и 39, сумматора 40, перемножителя 41, первого блока 42 добавления единицы, делителя 43, второго блока 44 добавления единицы.
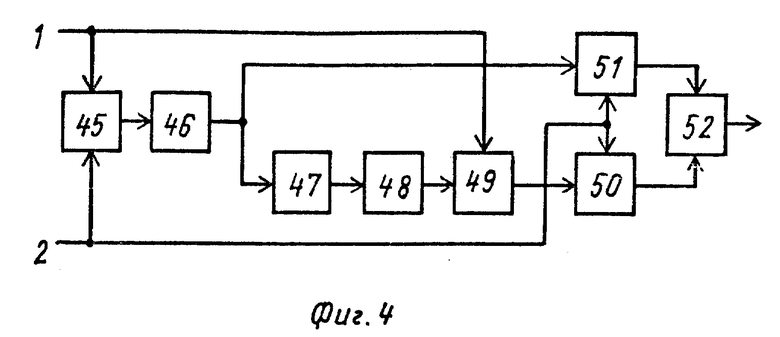
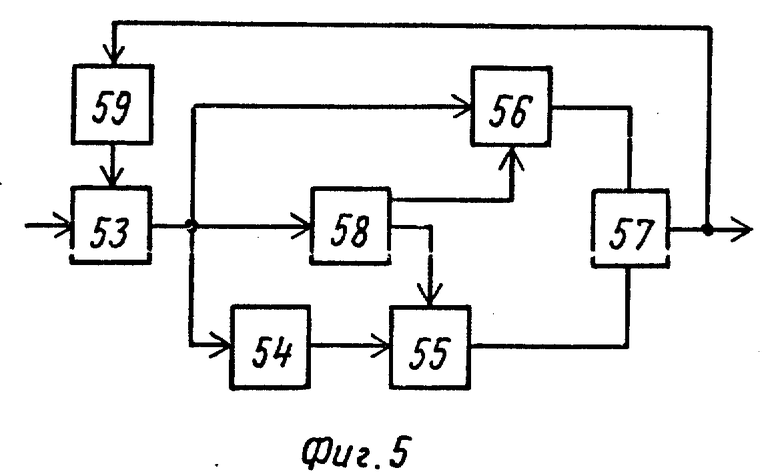
Измеритель 3 междупериодного сдвига фазы (фиг. 4) содержит делитель 45, блок 46 вычисления арктангенса, вычислитель 47 модуля, вычитатель 48 числа π, блок 49 присвоения знака, первый и второй ключи 50 и 51 и сумматор 52. Блок 12 вычисления доплеровского сдвига фазы (фиг. 5) содержит первый сумматор 53, вычитатель 54 числа 2π, первый и второй ключи 55 и 56, второй сумматор 57, парафазный компаратор 58, блок 59 задержки.
Устройство адаптивной режекции пассивных помех работает следующим образом. Синфазная и квадратурная составляющие Хk, Уk аддитивной смеси полезного сигнала и пассивной помехи или только одной помехи, соответствующие текущему периоду зондирования, поступают на первый и второй входы измерителя 1 коэффициента корреляции и входы каналов 4 и 5.
На третий и четвертый входы измерителя 1 коэффициента корреляции с выходов блока 10 задержки поступают составляющие xk-1 и yk-1, соответствующие предыдущему периоду зондирования.
Данные двух смежных периодов позволяют извлечь необходимую информацию о неизвестностных параметрах помехи - доплеровском сдвиге фазы и коэффициенте корреляции - путем вычисления комплексного корреляционного момента.
Для этого полученные входные величины через первый и третий перемножители 21 и 23 и сумматор 25 поступают в блок 27 усреднения, осуществляющий с помощью последовательно соединенных N-1 элементов задержки и N-1 сумматоров (на схеме не показаны) скользящее вдоль дальности суммирование. Аналогичное скользящее суммирование осуществляется в блоке 28 усреднения. Необходимо отметить, что пассивная помеха может значительно превосходить по уровню мощности полезный сигнал и быть по сравнению с ним боле протяженной по дальности.
Усреднение в блоках 27 и 28 измерителя 1 коэффициента корреляции позволит практически исключить влияние отраженного от цели полезного сигнала, занимающего один элемент разрешения по дальности.
Величины ak и bk на выходах блоков 27 и 28 усреднения пропорциональны квадратурным составляющим комплексного корреляционного момента и определяются в следующем виде:
где Rk - величина, пропорциональная модулю корреляционного момента помехи;
Δϕk= 2πFд.кT - доплеровский сдвиг фазы помехи с частотой Fд.п за k-й период повторения Т.
В результате выполнения операций в первом и втором квадраторах 29 и 30, третьем сумматоре 33 и третьем блоке 34 усреднения образуется величина  пропорциональная мощности помехи.
пропорциональная мощности помехи.
После вычислений, осуществляемых третьим и четвертым квадраторами 31 и 32, четвертым сумматором 35 и блоком 36 извлечения квадратного корня, образуется величина 
На выходе делителя 37 образуется оценка междупериодного коэффициента корреляции помехи 
Эта оценка используется в блоке 2 для вычисления оптимальных весовых коэффициентов, что обеспечивает адаптивное подавление помехи в режекторном фильтре 9.
Величины ak и bk поступают на соответствующие входы измерителя 3 междупериодного сдвига фазы, в котором с помощью делителя 45 и блока 46 вычисления арктангенса (фиг. 4) определяется оценка  имеющая интервал однозначности
имеющая интервал однозначности 
С целью расширения этого интервала последующие преобразования величины  проводятся путем определения знака величины bk, пропорциональной косинусу угла Δϕk.
проводятся путем определения знака величины bk, пропорциональной косинусу угла Δϕk.
При bk ≥ 0 открыт второй ключ 51 и величина  через сумматор 52 непосредственно поступает на вход вычислителя доплеровского сдвига фазы. При bk < 0 открыт первый ключ 50, а второй ключ 51 закрыт. При этом на выходе вычислителя 47 модуля образуется величина, вычитаемая в блоке 48 из числа π. Полученной разности присваивается знак величины ak, пропорциональный синусу исходного угла.
через сумматор 52 непосредственно поступает на вход вычислителя доплеровского сдвига фазы. При bk < 0 открыт первый ключ 50, а второй ключ 51 закрыт. При этом на выходе вычислителя 47 модуля образуется величина, вычитаемая в блоке 48 из числа π. Полученной разности присваивается знак величины ak, пропорциональный синусу исходного угла.
В результате вычислений диапазон однозначных измерений расширяется в два раза и определяется интервалом (-π,π).
Полученная на выходе измерителя 3 междупериодного сдвига фазы оценка, усредненная по N отсчетам доплеровского сдвига фазы помехи, определяется в следующем виде:
В вычислителе 12 доплеровского сдвига фазы осуществляется раздельно по каждому элементу разрешения по дальности суммирование величин Δϕj.
В результате на выходе первого сумматора 53 образуется результирующая величина сдвига фазы помехи за k периодов повторения, т.е. 
Величина αk затем поступает на парафазный компаратор 58, в котором модуль угла сдвига фазы сравнивается с величиной 2π.
Если сдвиг фазы по абсолютной величине превышает 2π, то на прямом выходе парафазного компаратора 58 образуется логическая единица, открывающая первый ключ 55.
В этом случае величина полного сдвига фазы с выхода вычитателя 54, в котором из его модуля вычитается величина 2π, в нормализованном виде поступает во второй сумматор 57. Первый ключ 56 при этом закрыт логическим нулем, поступающим с инверсного выхода парафазного компаратора 58.
Если полный сдвиг фазы на превышает по абсолютной величине 2π, то на инверсном выходе парафазного компаратора 58 образуется логическая единица, открывающая второй ключ 56, при этом первый ключ 55 закрывается. С выхода второго сумматора 57 полученная величина поступает по цепи обратной связи через блок 59 задержки на первый сумматор 53.
В косинусно-синусном преобразователе 13 осуществляется по заданному значению сдвига фазы αk вычисление величин sinαk и cosαk, поступающих на первые и вторые перемножители 6 и 8 обоих каналов.
В первых и вторых перемножителях 6 и 8 и сумматоре 7 осуществляется компенсация доплеровского сдвига фазы путем двумерного поворота поступающих с первых блоков 11 задержки квадратурных составляющих xk, yk на величину, равную вычисленному углу αk, но в противоположном направлении. Это приводит к остановке вращения вектора, образованного составляющими доплеровской частоты.
При этом квадратурные составляющие помехи на выходе сумматоров 7 определяются в следующем виде:
и практически не содержат модуляции доплеровской частотой.
Подавление пассивных помех осуществляется в режекторном фильтре 9.
Пример конкретного выполнения двухзвенного режекторного фильтра 9 третьего порядка приведен на фиг. 1. Первый блок задержки 14 и первый сумматор 15 образуют звено череспериодной компенсации первого порядка. Второй и третий блоки 16 и 17 задержки, второй и третий сумматоры 18 и 20 и перемножитель 19 образуют звено череспериодной компенсации второго порядка.
При этом для второго звена весовые коэффициенты по ho = h2 = 1, а оптимальная величина весового коэффициента h1, поступающего на вход управления режекторного фильтра 9, определяется из условия минимизации мощности помехи на выходе.
При гауссовской функции корреляции помехи оценка  определяется в соответствии с результатами работы [3] в следующем виде:
определяется в соответствии с результатами работы [3] в следующем виде:
Конкретный пример выполнения блока вычисления весовых коэффициентов в соответствии с выражением (4) приведен на фиг. 3.
Таким образом, предложенное устройство обеспечивает подавление пассивных помех с неизвестными и неоднородными по дальности доплеровской частотой и шириной спектра, что позволяет повысить точность селекции движущихся целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 1980 |
|
SU934816A1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1980 |
|
SU875960A2 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| ФИЛЬТР ПОДАВЛЕНИЯ ПОМЕХ | 2024 |
|
RU2835058C1 |
| ФИЛЬТР КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2834699C1 |
| ФИЛЬТР РЕЖЕКЦИИ ПОМЕХ | 2024 |
|
RU2837274C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |

1. Устройство адаптивной режекции пассивных помех, содержащее два канала, каждый из которых состоит из режекторного фильтра и последовательно соединенных первого перемножителя и сумматора, другой вход которого соединен с выходом второго перемножителя, последовательно соединенные измеритель коэффициента корреляции и вычислитель весовых коэффициентов, подключенный к управляющим входам режекторных фильтров обоих каналов, а также измеритель междупериодного сдвига фазы, отличающееся тем, что, с целью повышения точности селекций движущихся целей на фоне пассивных помех, введены последовательно соединенные вычислитель доплеровского сдвига фазы и косинусно-синусный преобразователь, первый и второй выходы которого соединены с объединенными входами первых и вторых перемножителей обоих каналов соответственно, а в каждый канал - первый и второй блоки задержки, входы которых соединены с входом канала и одним из входов измерителя коэффициента корреляции, причем выходы первых блоков задержки обоих каналов соединены с другими входами измерителя коэффициента корреляции, выход второго блока задержки соединен с объединенными входами первого перемножителя одного канала и второго перемножителя другого канала, при этом входы и выход измерителя междупериодного сдвига фаз соединены соответственно с другими выходами измерителя коэффициента корреляции и входом вычислителя доплеровского сдвига фазы, а выход сумматора каждого канала соединен с входом режекторного фильтра.
2. Устройство по п. 1, отличающееся тем, что режекторный фильтр содержит последовательно соединенные первый блок задержки, первый сумматор, другой вход которого соединен с входом первого блока задержки, второй блок задержки, перемножитель, другой вход которого является входом управления, второй сумматор, другой вход которого соединен с выходом первого сумматора, и третий сумматор, причем между выходом второго блока задержки и другим входом третьего сумматора включен третий блок задержки.
3. Устройство по п. 1, отличающееся тем, что вычислитель весовых коэффициентов содержит последовательно соединенные первый и второй квадраторы, сумматор, другой вход которого через перемножитель соединен с входом первого квадратора, первый блок добавления единицы, делитель, а между входом первого квадратора и другим входом делителя включен второй блок добавления единицы.
4. Устройство по п. 1, отличающееся тем, что измеритель междупериодного сдвига фазы содержит последовательно соединенные делитель, блок вычисления арктангенса, вычислитель модуля, вычитатель числа π, блок присвоения знака, другой вход которого соединен с входом делителя, первый ключ и сумматор, причем между выходом блока вычисления арктангенса и другим входом сумматора включен второй ключ, а управляющие входы делителя, первого и второго ключей подключены к другому входу.
5. Устройство по п. 1, отличающееся тем, что вычислитель доплеровского сдвига содержит последовательно соединенные первый сумматор, вычитатель числа 2π, первый ключ и второй сумматор, выход которого соединен с другим входом первого сумматора через блок задержки, причем между выходом первого сумматора, к которому также подключен парафазный компаратор, и другим входом второго сумматора включен второй ключ, а управляющие входы первого и второго ключей подключены соответственно к прямому и инверсному выходам парафазного компаратора.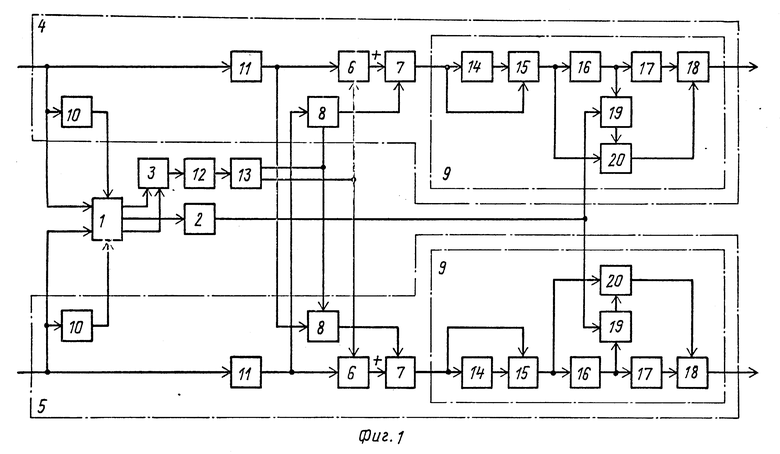
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лихарев В.А | |||
| Цифровые методы и устройства в радиолокации | |||
| Советское радио, 1973, с | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 1980 |
|
SU934816A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
