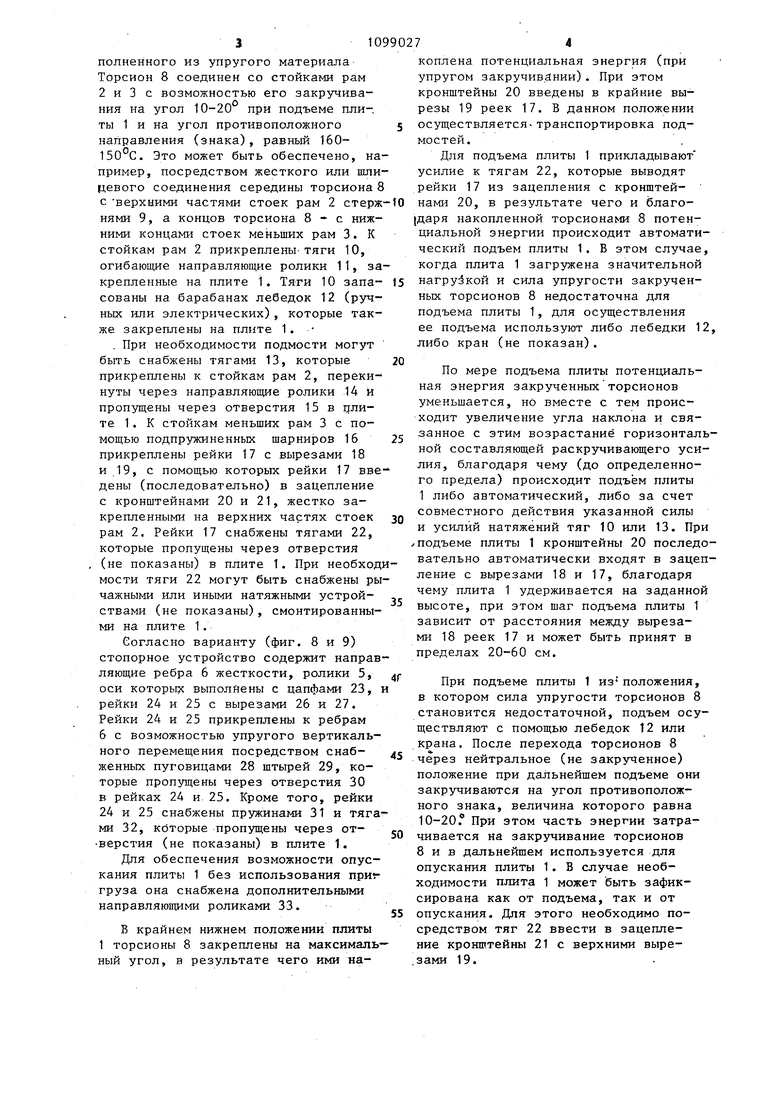
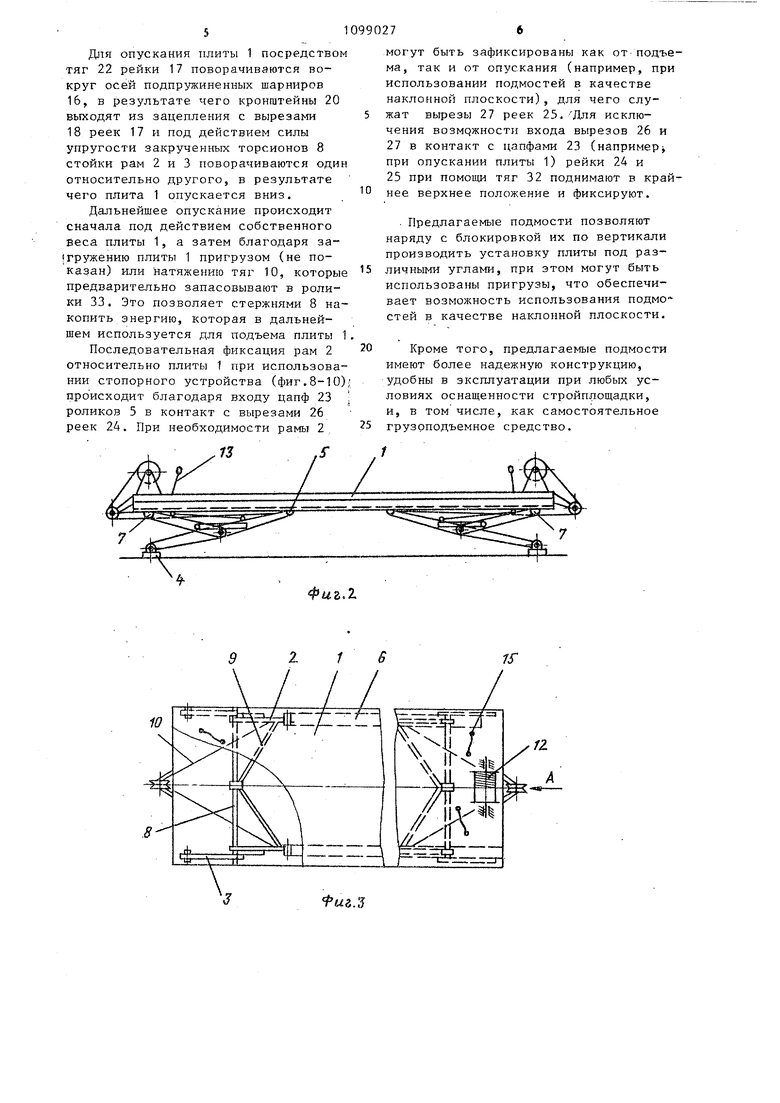
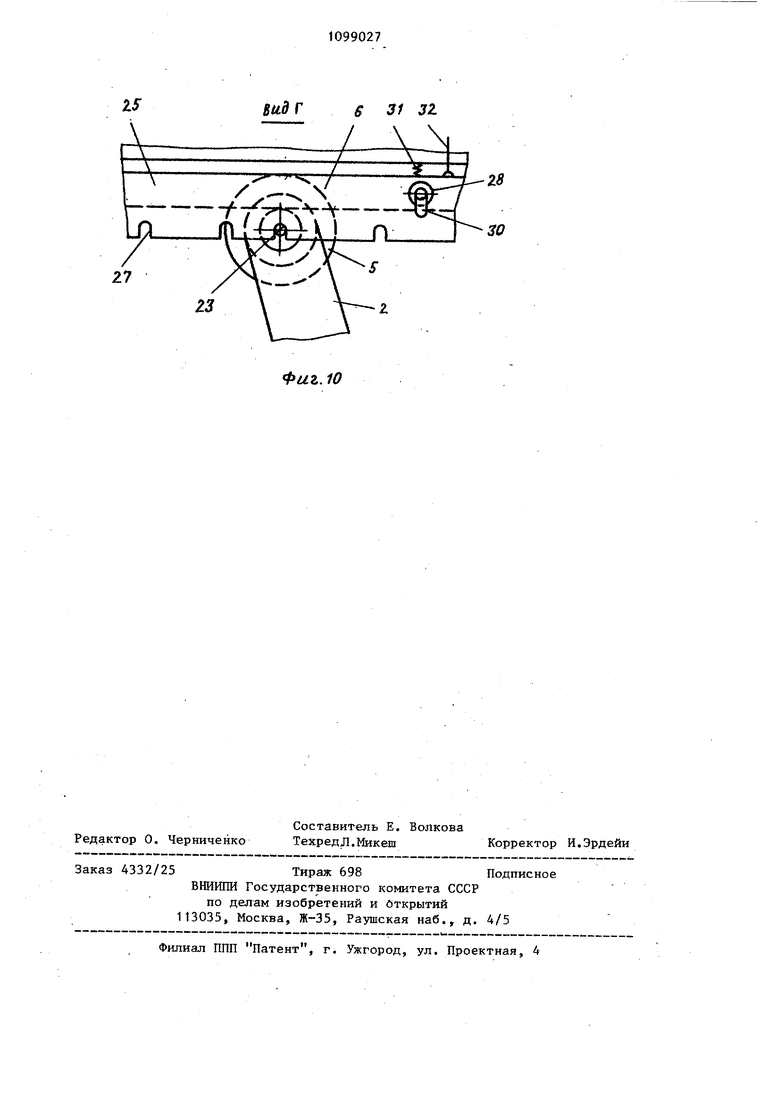
Изобретение относится к средства подмащивания и может быть использовано для строительно-монтал;нь к рабо при возведении жилых, общественньЕх и промышленных зданий, а также для производства погрузоразгрузочньпс ра бот. Известны подмости, сод,ержащие нед вижную плиту и иеподвижное основание, две опоры в виде шарнирно соединенных между собой парных рычагов и стопорное устройство 1) , Недостатками этих подмостей явля ются высокая металлоемкость и необходимость исполгззования для нoдъe a и опускания грузоподъемной техники. что значительно снижает их функциональные возможности. Наиболее близкими к изобретению по технической сущности являются подмости, содержащтге плиту, опоры в виде плоских разновеликих рам с роликами, опорные башмаки и стопорные устройства 2 . Недостатками известных подмостей являются сложность конструкции, недостаточная надежность и неудобство в эксплуатации, обусловленные тем, что величина усилия, прикладываемог к верхним концам стоек больших рам, существенно зависитот угла их наклона В крайнем нижнем положении плиты оно достигает максимума и направлено в основном вдоль стоек рам вследствие чего при подъеме плиты возникает необходимость увеличения этого усилия, что в свою очередь связано с увеличением размеров материалоемкости и мощности тяговых .устройств (тросов, роликов, лебедок и т.п.). В крайнем верхнем поло жении, когда стойки рам занимают по ложение, близкое к вертикальному, уменьшается вероятность (без прикла дывания дополнительного усилия, направленного горизонтально к середин пролета плиты) вьшода рам из этого положения, что приводит к неудобств обслугкивания. Кроме того ..известные подмости им ют недостаточную поперечную устойчивость, так как разновеликие рамы не имеют жестких узлов Целью изобретения является повышение надежности и улучшение условий эксплзатации. Поставленная цель достигается тем что в подмостях, содержащих плиту. опоры в виде плоских разновеликих рам с роликами, опорные башмаки и стопорные устройства, ра зновеликие рамы каждой опоры соединены мелд;у собой посредством торсиона, который соединен т.о стойками рам с возмолсНостью закручивания на разновеликий разнозначный угол при подъеме и опускании плиты. Кроме того, стопорное устройство плиты выполнено- в виде зубчатых реек, снабженных, фиксирую цими тягами, пропуще)-ил)ми через отверстия в плите, при этом плита имеет П-образные ребра жесткости, на полках которых закреплены рейки, а на осях роликов выполнены цапфы, взаимодействуюпще с зубьями реек. При гэтом стопорное устройство рам выполнено в виде реек с двусторонними несимметричными зубьяьда,- прямыми на верхней грани и имеющими односторонний скос на нижней грани, и фиксирующих тяг, прикрепленных с помощью поднруясиненных шарниров к меньшим стойкам рам с возможностью последовательного зацепления с цапфами, закрепленными на больших стойках рам. На фиг, 1 схематически изображены подмости с подвижной плитой, крайнее верхнее положение, на фиг. 2 то же, крайнее нижнее положение, на фиг. 3 подмости, вид в плане; на фиг. 4 вид А на фиг. 3, на фиг- 5 - узел j на фиг. 1 на фиг, 6 - вид Б на фиг, 5, на фиг, 7 - стопорное устройство; на фиг. 8 - узел 1 I на фиг, 1, на тг с 9 - вид В на фиг. 1, на фиг. 10 - вид Г на. фиг. 9. . Подмости содержат подвилсную плиту 1и опоры, выполненные в виде плоски разновеликих рам 2 и 3. Большие рамы 2снабжены caмoycтaнaвлиБaющи мcя башмакам- 4 и прикрепленными сверху роликам-1 5, перемещающимися по закрепленным на плите 1 и выполненными в виде направляющих ребер 6 лсесткости. При отношении длины подмостей к их максимальной подъема менее двух стойки одной из больших рам должны быть смещены к продольной плоскости сим етрии -подмостей на величину, несколько бол.ъш-ую длины ролика 5 (не по казано). Меньшие рамь 3 шарнирно прикреплены к кронЕгтейнам 7, установленным на плите 1. Рамы 2 и 3 соединены между собой посредством торсиона 8, выполненного из упругого материала Торсион 8 соединен со стойками рам 2 и 3 с возможностью его закручивания на угол 10-20 при подъеме пли-, ты 1 и на угол противоположного направления (знака), равный 160150°С. Это может быть обеспечено, на пример, посредством жесткого или шли цевого соединения середины торсиона с верхними частями стоек рам 2 стерж нями 9, а концов торсиона 8 - с нижними концами стоек меньших рам 3. К стойкам рам 2 прикреплены-тяги 10, огибающие направляющие ролики 11, за крепленные на плите 1. Тяти 10 запасованы на барабанах лебедок 12 (ручных или электрических), которые также закреплены на плите 1. . При необходимости подмости могут быть снабжены тягами 13, которые прикреплены к стойкам рам 2, перекинуты через направляющие ролики 14 и пропущены через отверстия 15 в цлите 1. К стойкам меньших рам 3 с помощью подпружиненных шарниров 16 прикреплены рейки 17 с вырезами 18 и 19, с помощью которых рейки 17 вве дены (последовательно) в зацепление с кронштейнами 20 и 21, жестко закрепленными на верхних частях стоек рам 2. Рейки 17 снабжены тягами 22, которые пропущены через отверстия (не показаны) в плите 1. При необход мости тяги 22 могут быть снабжены ры чажными или иными натяжными устройствами (не показаны), смонтированными на плите 1, Согласно варианту (фиг. 8 и 9) стопорное устройство содержит направ ляющие ребра 6 жесткости, ролики 5, оси которых выполнены с цапфами 23, рейки 24 и 25 с вырезами 26 и 27. Рейки 24 и 25 прикреплены к ребрам 6 с возможностью упругого вертикального перемещения посредством снабженных пуговицами 28 штырей 29, которые пропущены через отверстия 30 в рейках 24 и 25. Кроме того, рейки 24 и 25 снабжены пружинами 31 и тяга ми 32, которые пропущены через отверстия (не показаны) в плите 1. Для обеспечения возможности опускания плиты 1 без использования приг груза она снабжена дополнительными направляющими роликами 33. В крайнем нижнем положении плиты 1 торсионы 8 закреплены на максималь ный угол, в результате чего ими накоплена потенциальная энергия (при упругом закручивании). При этом кронштейны 20 введены в крайние вырезы 19 реек 17. В данном положении осуществляется, транспортировка подмостей. Для подъема плиты 1 прикладывают усилие к тягам 22, которые выводят рейки 17 из зацепления с кронштейнами 20, в результате чего и благодаря накопленной торсионами 8 потенциальной энергии происходит автоматический подъем плиты 1. В этом случае, когда плита 1 загружена значительной нагру:5кой и сила упругости закрученных торсионов 8 недостаточна для подъема плиты 1, для осуществления ее подъема используют либо лебедки 12, либо кран (не показан). По мере подъема плиты потенциальная энергия закрученных торсионов уменьшается, но вместе с тем происходит увеличение угла наклона и связанное с этим возрастание горизонтальной составляющей раскручивающего усилия, благодаря чему (до определенного предела) происходит подъём плиты 1 либо автоматический, либо за счет совместного действия указанной силы и усилий натяжений тяг 10 или 13. При подъеме плиты 1 кронштейны 20 последовательно автоматически входят в зацепление с вырезами 18 и 17, благодаря чему плита 1 удерживается на заданной высоте, при этом шаг подъема плиты 1 зависит от расстояния между вырезами 18 реек 17 и может быть принят в пределах 20-60 см. При подъеме плиты 1 изположения, в котором сила упругости торсионов 8 становится недостаточной, подъем осуществляют с помощью лебедок 12 или крана. После перехода торсионов 8 через нейтральное (не закрученное) положение при дальнейшем подъеме они закручиваются на угол противоположного знака, величина которого равна 10-20. При этом часть энергии затрачивается на закручивание торсионов 8 и в дальнейшем используется для опускания плиты 1. В случае необходимости плита 1 может быть зафиксирована как от подъема, так и от опускания. Для этого необходимо посредством тяг 22 ввести в зацепление кронштейны 21 с верхними вырезами 19.
Для опускания плиты 1 посредством тяг 22 рейки 17 поворачиваются вокруг осей подпружиненных шарниров 16, в результате чего кронштейны 20 выходят из зацепления с вырезами 18 реек 17 и под действием силы упругости закрученных торсионов 8 стойки рам 2 и 3 поворачиваются один относительно другого, в результате чего плита 1 опускается вниз.
Дальнейшее опускание происходит сначала под действием собственного веса плиты 1, а затем благодаря за|гружению плиты 1 пригрузом (не показан) или натяжению тяг 10, которые предварительно запасовывают в ролики 33. Это позволяет стержнями 8 накопить энергию, которая в дальнейшем используется для подъема плиты 1.
Последовательная фиксация рам 2 относительно плиты t при использовании стопорного устройства (фиг.8-10);, происходит благодаря входу цапф 23 роликов 5 в контакт с вырезами 26 реек 24. При необходимости рамы 2.
могут быть зафиксированы как от подъема, так и от опускания (например, при использовании подмостей в качестве наклонной плоскости), для чего служат вырезы 27 реек 25.Для исключения возмджности входа вырезов 26 и 27 в контакт с цапфами 23 (например при опускании плиты 1) рейки 24 и 25 при помощи тяг 32 поднимают в крайнее верхнее положение и фиксируют.
. Предлагаемые подмости позволяют наряду с блокировкой их по вертикали производить установку плиты под различными углами, при этом могут быть использованы пригрузы, что обеспечивает возможность использования ПОДМО
стей в качестве наклонной плоскости.
Кроме того, предлагаемые подмости имеют более надежную конструкцию, удобны в зксплуатации при любых условиях оснащенности стройплощадки, и, в том числе, как самостоятельное грузоподъемное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подмости | 1977 |
|
SU750016A1 |
| ПОДЪЕМНЫЙ СТОЛ | 1998 |
|
RU2138349C1 |
| Подъемный подмости | 1978 |
|
SU800320A1 |
| Подъемный стол | 2015 |
|
RU2612116C2 |
| Консольные подмостки | 1978 |
|
SU815220A1 |
| Подмости | 1984 |
|
SU1188290A1 |
| Раздвижные подъемные подмости | 1988 |
|
SU1565998A1 |
| Капустоуборочная машина | 1931 |
|
SU28368A1 |
| Установка для формования объемных элементов и арматурный каркас для объемных элементов | 1981 |
|
SU996196A1 |
| Подъемные помости | 1983 |
|
SU1158719A1 |
1. ПОДМОСТИ, содержащие плиту, опоры в виде плоских разновеликих рам с роликами, опорные башмаки и стопорные устройства, о т л и ч аю щ и е с я тем, что, с целью повышения надежности и улучшения условий эксплуатации, разновеликие рамы каждой опоры соединены между собой посредством торсиона, который соединен со стойками рам с возможностью закручивания на разновеликий разнозначный угол при. подъеме IT опускаипи плиты. 2,Подмости по п, 1, отличающиеся тем, что стопорное устройство плиты выполнено в виде зубчатых реек, снабженных фиксирующими тягами, пропущенными через отверстия в плите, при этом плита имеет П-образные ребра жесткости, на полках которых закреплены рейки-, а на осях роликов выполнены цапфы, взаимодействующие с зубьями реек, 3.Подмости по п, 1, о т л и ч аю щ и е с я тем, что стопорное устройство рам выполнено в виде реек с двусторонними несимметричными зубья,ми, прямыми на верхней грани и имеющими односторонний скос на нижней грани, и фиксирующих тяг, прикрепленных с помощью подпружиненных шарниров к меньшим стойкам рам с возможностью последовательного зацепления с цапфами, закрепленными на больших стойках рам.
Вид Б
Фаг. 6 16
Ф«г.5 17
Фаг. 10
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Подмости | 1975 |
|
SU622954A1 |
